 分享一個不錯的基于深度學習的車牌檢測系統設計
分享一個不錯的基于深度學習的車牌檢測系統設計
概述
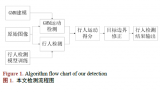
基于深度學習的車牌識別,其中,車輛檢測網絡直接使用YOLO偵測。而后,才是使用網絡偵測車牌與識別車牌號。
車牌的偵測網絡,采用的是resnet18,網絡輸出檢測邊框的仿射變換矩陣,可檢測任意形狀的四邊形。
車牌號序列模型,采用Resnet18+transformer模型,直接輸出車牌號序列。
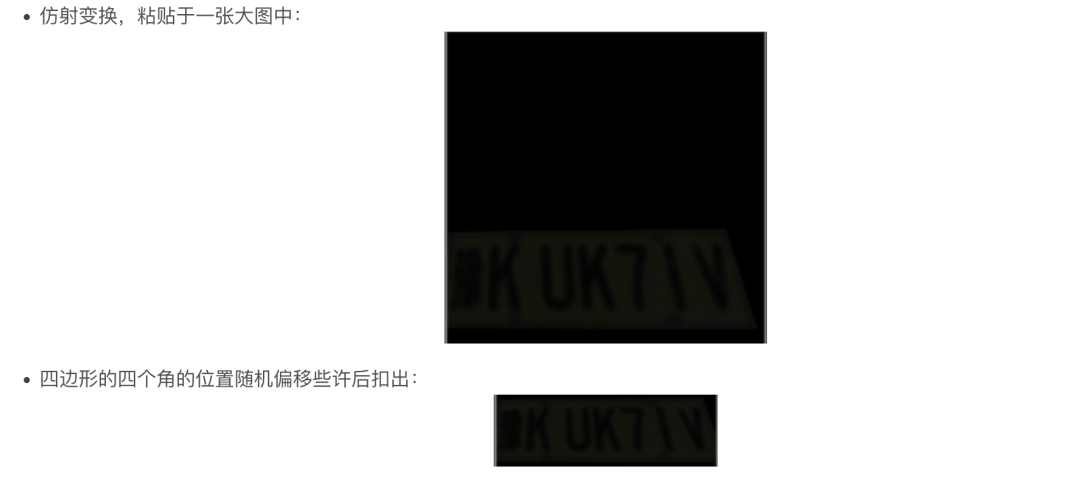
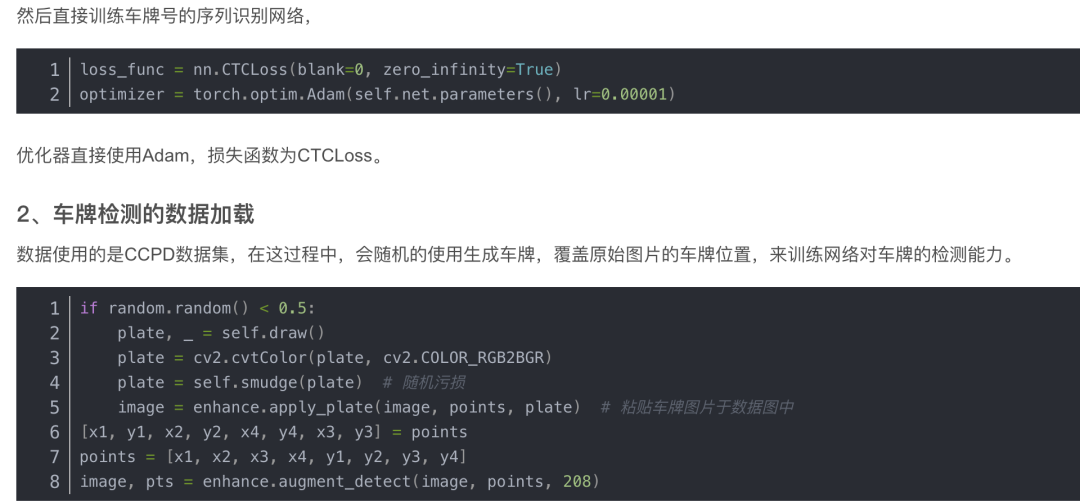
數據集上,車牌檢測使用CCPD 2019數據集,在訓練檢測模型的時候,會使用程序生成虛假的車牌,覆蓋于數據集圖片上,來加強檢測的能力。
車牌號的序列識別,直接使用程序生成的車牌圖片訓練,并佐以適當的圖像增強手段。模型的訓練直接采用端到端的訓練方式,輸入圖片,直接輸出車牌號序列,損失采用CTCLoss。
一、網絡模型
1、車牌的偵測網絡模型:
網絡代碼定義如下:
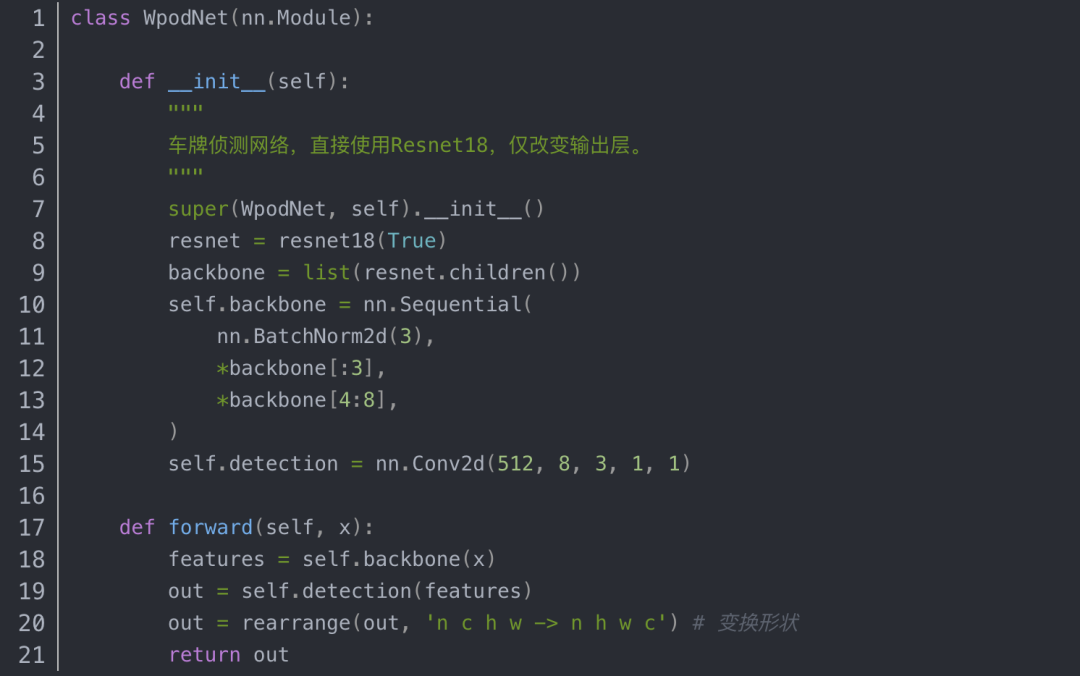
該網絡,相當于直接對圖片劃分cell,即在16X16的格子中,偵測車牌,輸出的為該車牌邊框的反射變換矩陣。
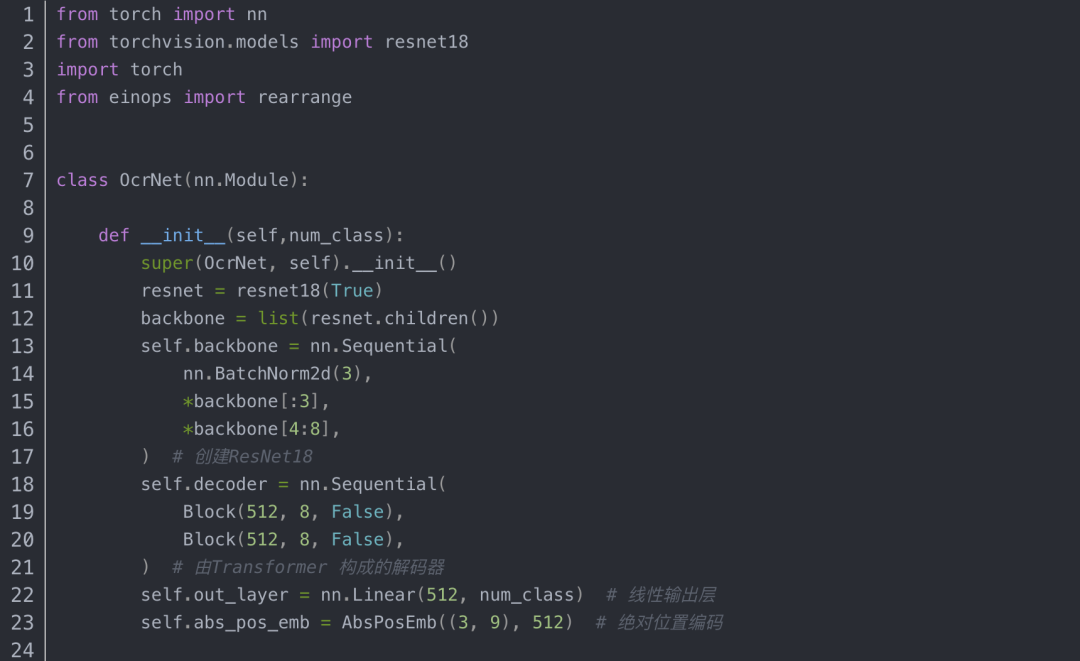
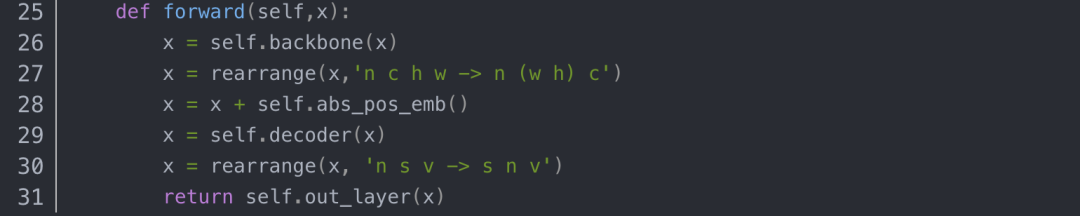
2、車牌號的序列識別網絡:
車牌號序列識別的主干網絡:采用的是ResNet18+transformer,其中有ResNet18完成對圖片的編碼工作,再由transformer解碼為對應的字符。
網絡代碼定義如下:
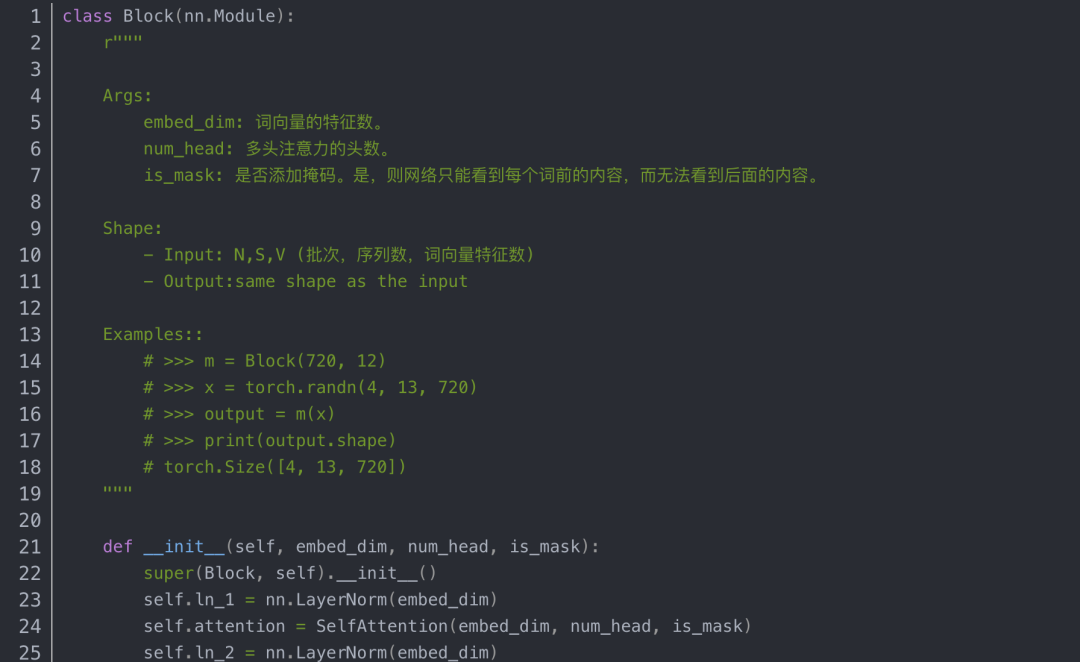
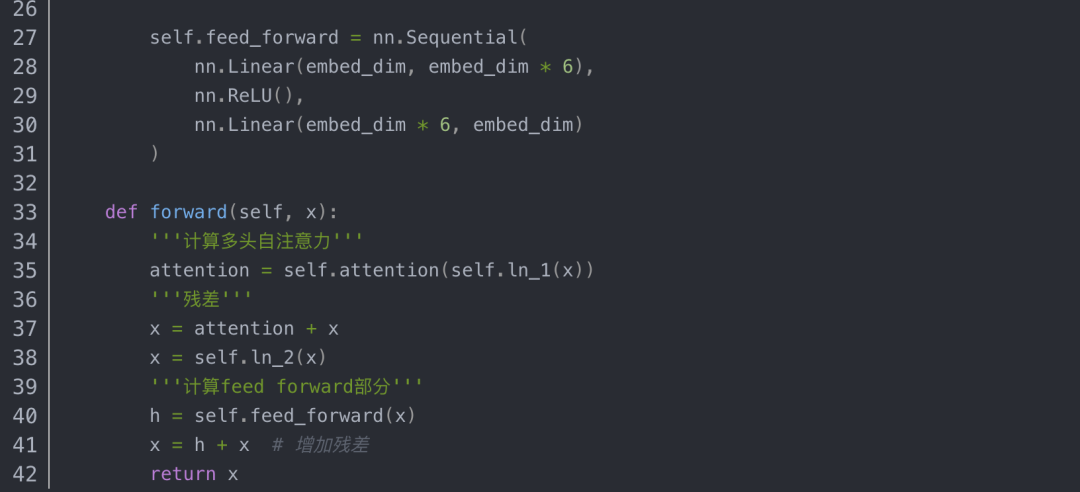
其中的Block類的代碼如下:
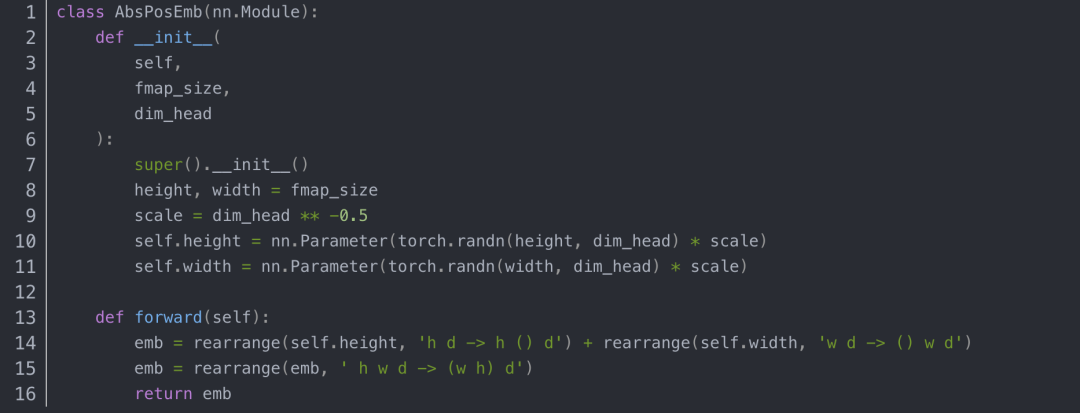
位置編碼的代碼如下:
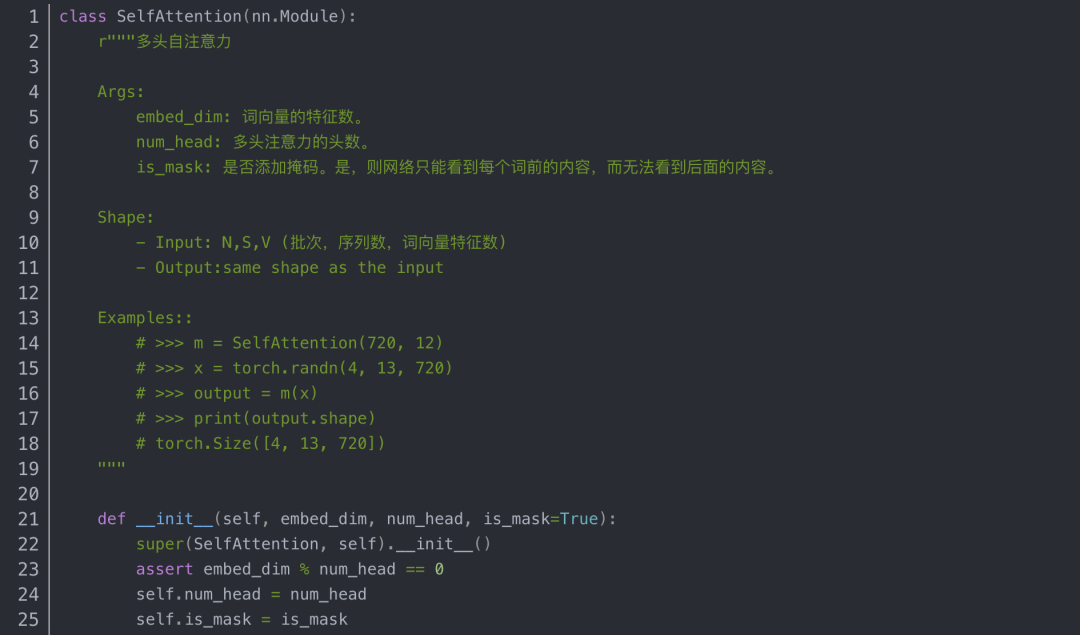
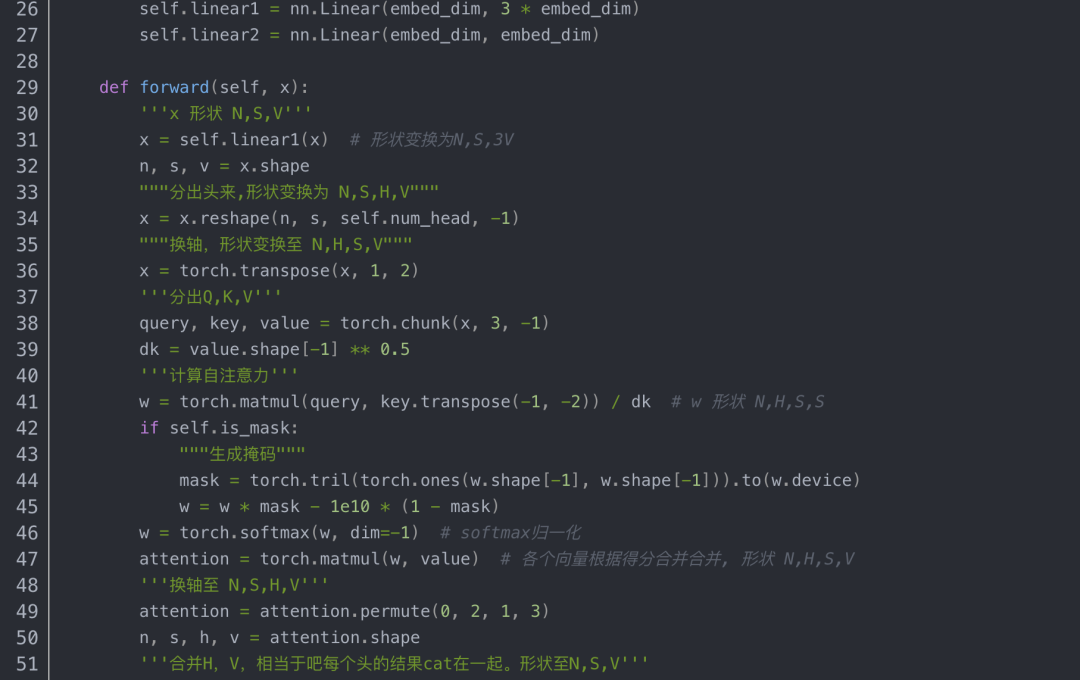
Block類使用的自注意力代碼如下:

二、數據加載
1、車牌號的數據加載
同過程序生成一組車牌號:

再通過數據增強,
主要包括:

三、訓練
分別訓練即可
其中,偵測網絡的損失計算,如下:
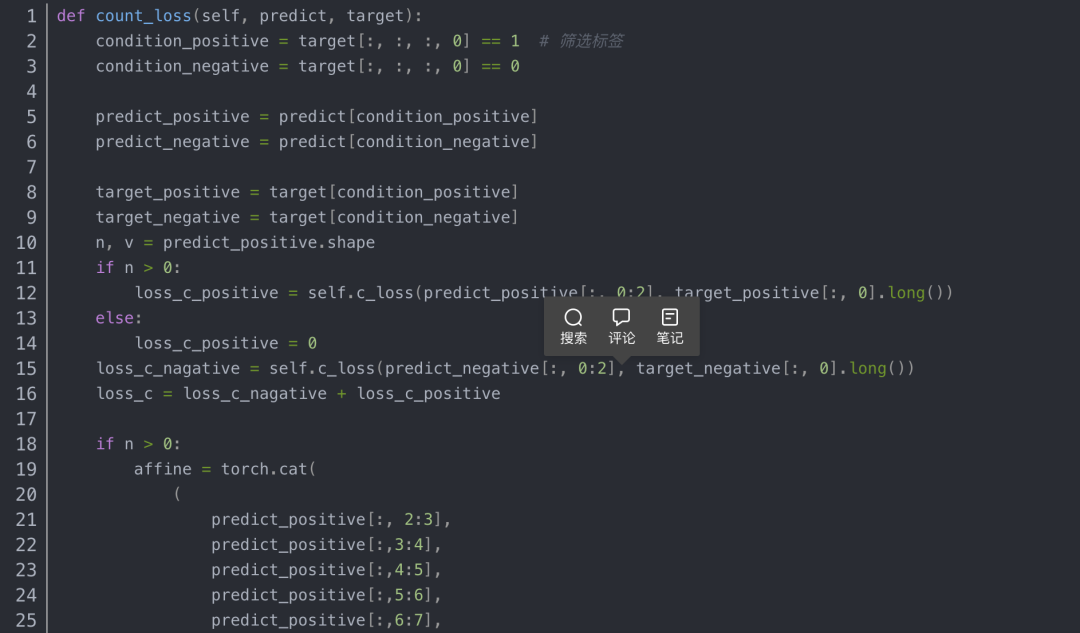
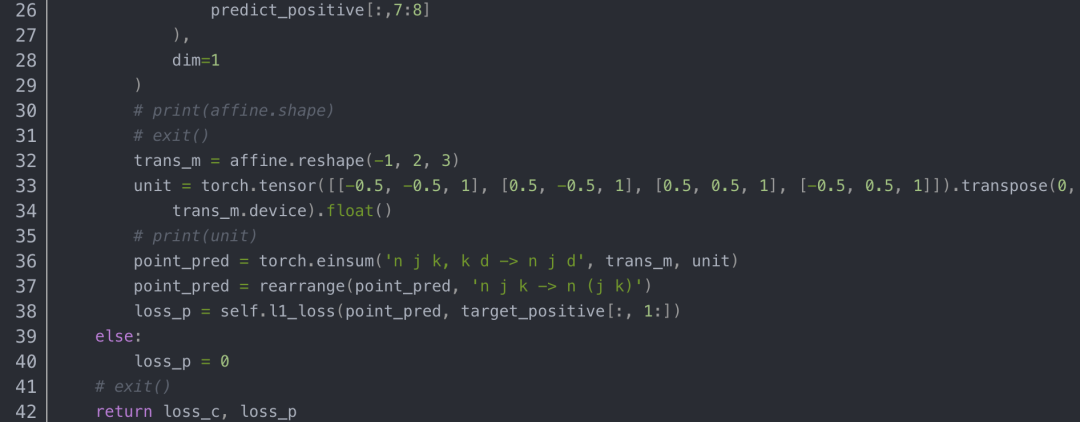
偵測網絡輸出的反射變換矩陣,但對車牌位置的標簽給的是四個角點的位置,所以需要響應轉換后,做損失。其中,該cell是否有目標,使用CrossEntropyLoss,而對車牌位置損失,采用的則是L1Loss。
四、推理
1、偵測網絡的推理
按照一般偵測網絡,推理即可。只是,多了一步將反射變換矩陣轉換為邊框位置的計算。
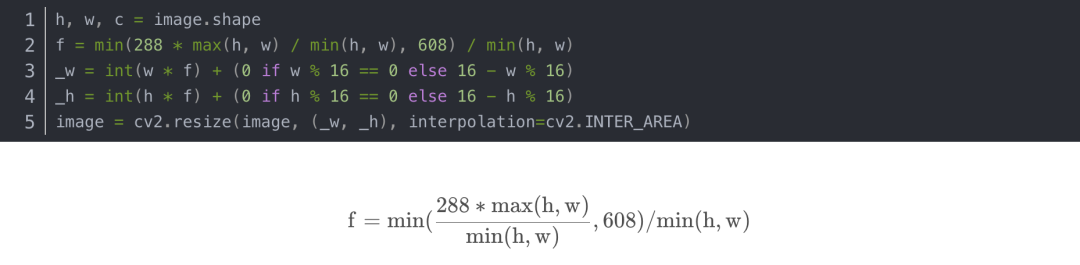
另外,在YOLO偵測到得測量圖片傳入該級進行車牌檢測的時候,會做一步操作。代碼見下,將車輛檢測框的圖片扣出,然后resize到長寬均為16的整數倍。
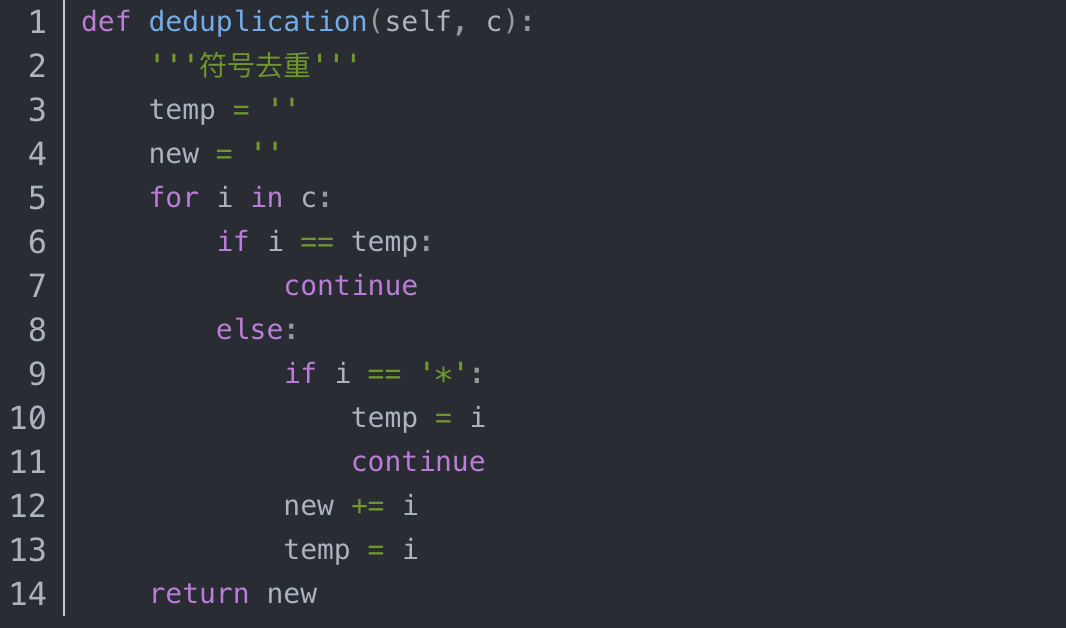
2、序列檢測網絡的推理
對網絡輸出的序列,進行去重操作即可,如間隔標識符為“*”時:
完整代碼
https://github.com/HibikiJie/LicensePlate
審核編輯:陳陳
-
檢測系統
+關注
關注
3文章
947瀏覽量
43014 -
檢測識別
+關注
關注
0文章
9瀏覽量
7230 -
深度學習
+關注
關注
73文章
5492瀏覽量
120975
原文標題:基于深度學習的車牌檢測識別(Pytorch)(ResNet +Transformer)
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
【超值干貨】 揭秘車牌識別算法
Nanopi深度學習之路(1)深度學習框架分析
【HarmonyOS HiSpark AI Camera】基于深度學習的目標檢測系統設計
射頻系統的深度學習【回映分享】
【KV260視覺入門套件試用體驗】六、VITis AI車牌檢測&車牌識別
如何使用深度學習進行視頻行人目標檢測
OpenCV使用深度學習做邊緣檢測的流程







 工商網監
工商網監
評論