 介紹一下KUKAC2機器人關于INTERBUS PCI卡進行主從配置的文件
介紹一下KUKAC2機器人關于INTERBUS PCI卡進行主從配置的文件
前言:
Interbus現場總線是KUKAC2機器人最常用的總線系統。它以簡潔,快速方便的控制特點,在整個大眾公司的焊裝車間曾經廣泛使用!尤其是在VASS標準和PROFINET網絡廣泛推廣之前,成為 KUKAC2機器人和PLC的表配,下面我們來介紹一下KUKAC2機器人關于INTERBUS PCI卡進行主從配置的文件。
界面選項:主-從
接口選項,KRC是主從設備(1)
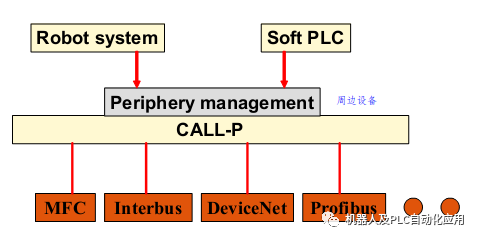
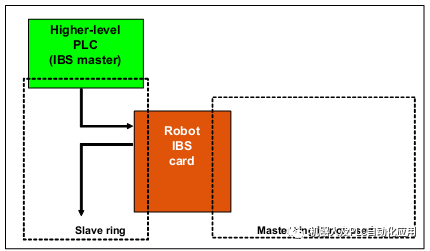
上級PLC(IBS主站)-機器人IBS卡-
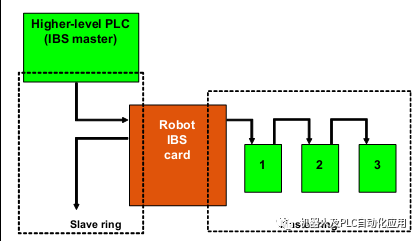
機器人作為Interbus設備
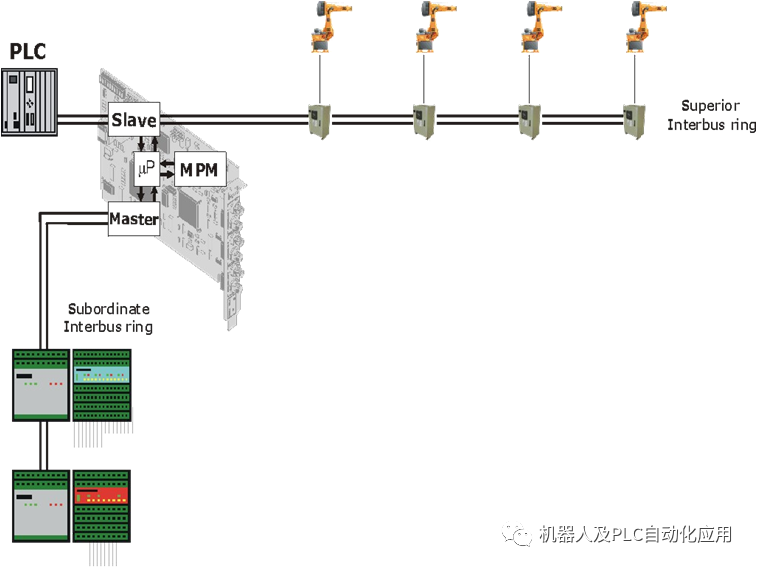
根據其系統環境,KRC機器人可以在過程數據通信方面扮演各種角色。
在最簡單的情況下,機器人與其他I / O模塊一樣,與作為從站的更高級別的主站(例如單元或線路PLC)交換過程數據。
但是,機器人本身可以作為主機來控制過程通訊,其中執行器和傳感器僅作為從機參與。
在大型生產系統中,傳送帶,生產單元和大型機器構成不同的層次級別,其中某些控制器充當這些生產級別之間的中介。
機器人控制器通常執行此功能,例如在焊接和裝配線中。
上圖中示意性地顯示了機器人的這種中間角色。在更高級別的從屬環中,機器人作為從屬與更高級別的控制器通信,該控制器協調整個系統,包括其輸送機系統以及可能的多個機器人。在較低級別的主環中,機器人控制其工具并從其過程環境接收信號。
本節介紹的所有Interbus控制器板均支持上述所有三個角色。主連接和從連接彼此獨立運行,即,每一側都有自己的過程數據區。但是,兩個通信級別可以通過配置更緊密地耦合。
PCI卡 我們現在使用卡
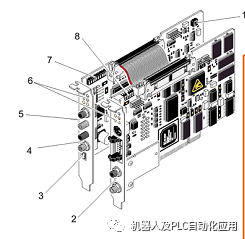
1.重置按鈕(從動)
2.主接口(遠程輸出,傳出遠程總線)
4.從站接口(遠程輸出,傳出遠程總線)
5.從接口(遠程輸入,傳入的遠程總線)
6.指示器元件(LED)
7.用于從站配置的DIP開關
8.用于主配置的DIP開關
該卡是ISA系統耦合器的基于PCI的重新開發。因此,該卡的性能類似于IBS ISA SC / RI / RT-LK。主要區別在于將Interbus主控和從屬部件分離到通過連接電纜相互鏈接的兩個不同的卡上。
Interbus主卡包含系統耦合器的PCI連接,該卡用于與PC進行通信。該卡可以安裝在PC中任何可用的PCI插槽中。
Interbus從卡具有一個PCI端子排,其唯一目的是能夠將該卡連接到PCI插槽以及前面板。該PC I端子排也可以在預定的斷裂點處折斷。也可以將卡擰在一起。
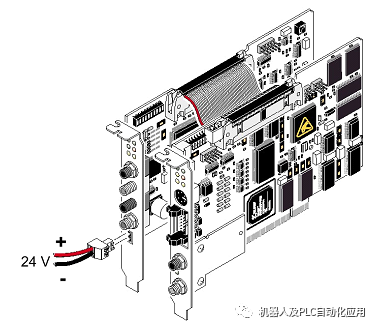
外接電源
為了操作控制板,還必須為從擴展模塊提供外部24 V DC電源電壓。該電源電壓通過2針MINI-COMBICON連接器連接。
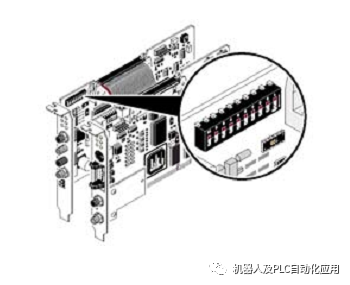
1-2通訊參數的頻道
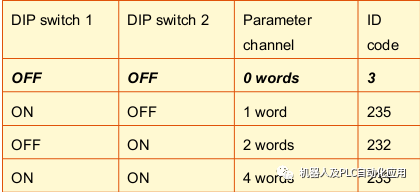
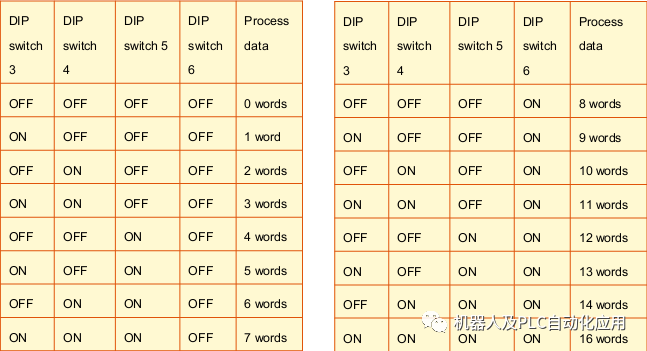
3-6 通訊位數
7:重置主機PC DIP開關7時的重置響應用于確定下級主系統的重置是否觸發上級系統中的外圍故障。如果開關設置為“ OFF”,則不會有任何消息發送到上級系統。在“ ON”位置,將觸發一條消息,以便更高級別的系統可以做出反應。
8: 重新配置請求DIP開關8用于啟用通過OPC總線端子進行的重新配置請求。該機構在“ OFF”位置被禁用。
9:設置從機部分的波特率OFF = 500kBaud,ON 2000kBaud。
10: 組態,DIP開關10特別重要。如果它處于“ ON”位置,則根據DIP開關1至9的設置來配置控制板的從屬部分。如果它處于“ OFF”位置,則將忽略開關設置1至9,并且將 從組件是根據已經駐留在系統中或從較低級別的主機接收的配置執行的。
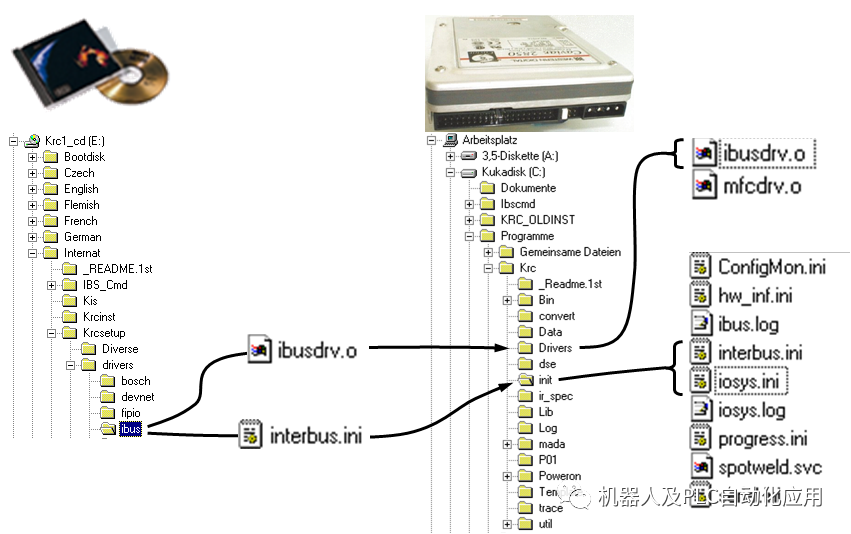
主目錄
與操作相關的KRC控制器的所有文件和目錄都位于此
目錄或其子目錄中。在配置文件中,指定相對于主目錄的路徑,即
只需省略與主目錄相對應的絕對路徑規范部分即可。
INIT目錄
該目錄包含配置Interbus連接時需要檢查和修改的最重要文件。I / O系統和Internet總線驅動程序都希望在此目錄中找到其配置文件。
LOG目錄
控制器的各個部分在此目錄中生成文件,以記錄其系統消息。
I / O系統還在此處存儲有關上次重新引導的信息。Interbus驅動程序還可以生成日志文件,使用戶可以自己確定驅動程序日志文件的目錄。
DRIVERS目錄
附加驅動程序(例如Interbus驅動程序)的程序必須位于DRIVERS子目錄中。否則,驅動程序將無法由I / O系統激活。
PCI cards :
? C:...INITIOSYS.INI: I / O系統的配置文件
IOSYS.INI
由于其在將外圍設備連接到機械手方面的核心作用,因此I / O系統的此配置文件始終安裝在主分區上。
PCI card:
? C:...INITIBSPCI1.INI: Interbus驅動程序的參數化文件
INTERBUS.INI
INTERBUS.INI文件位于控制器的Init直接目錄中。它包含Interbus ISA卡的參數化數據。
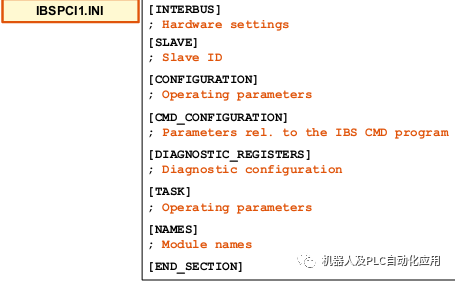
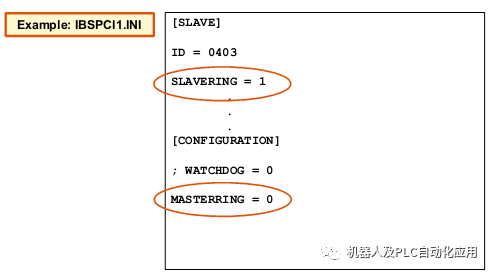
IBSPCI1.INI
文件IBSPCI1.INI位于控制器的Init目錄中。它包含Interbus PCI卡的參數化數據。
? C:...DRIVERSIBPCIDRV.O: 所有Interbus PCI卡的驅動程序
IBSPCIDRV.O
該文件包含所有Interbus PCI卡的驅動程序。
接口選項,KRC為主機和從機(2)
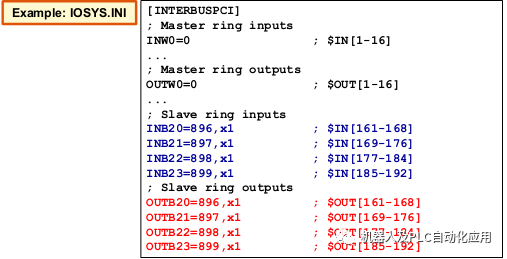
配置文件IOSYS.INI
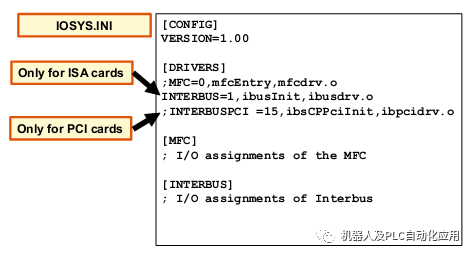
[CONFIG]
VERSION=1.00
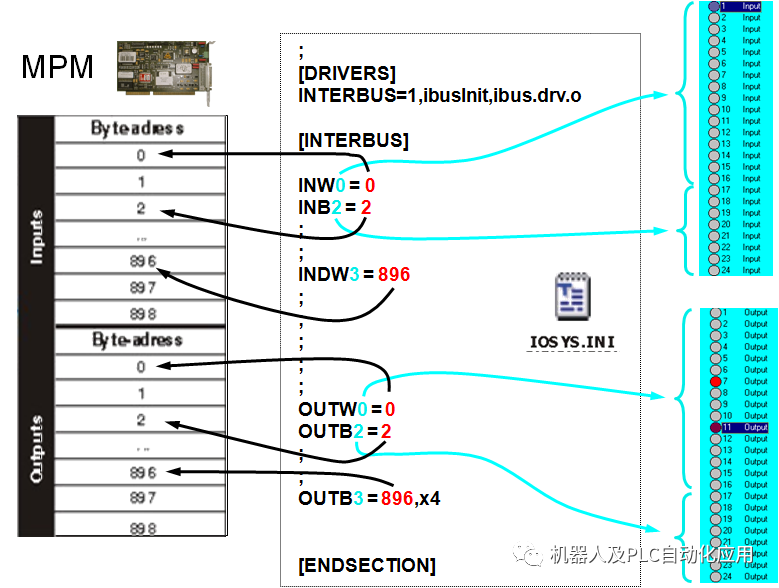
[DRIVERS]
INTERBUSPCI=15,ibsCPPciInit,ibpcidrv.o 激活interbusPCI卡的使用
PROCONOS=100,pcosInit,pcosdrv.o 內部軟PLC軟件激活
激活INTERBUS驅動程序
通過配置文件IOSYS.INI的[DRIVERS]部分中以下形式的條目來激活INTERBUS驅動程序:
Section name= Index,ibusInit,ibusdrv.o
Section name
段名稱必須與包含用于Interbus連接的I / O分配的部分的名稱一致。因此,在發貨時,IOSYS.INI文件始終包含一個Interbus節。
Index指數
索引是介于0到16之間的數字,但是目前沒有意義。但是,使用的索引一定不能是已經使用的索引。PCI卡必須使用15。
ibsCPPciInit
接下來是INTERBUS驅動程序啟動功能的名稱。這是區分大小寫的,必須如上所示準確輸入。
ibpcidrv.o
ibusdrv.o是Interbus驅動程序的文件名。當啟動I / O系統時,系統將在 drivers目錄中查找該文件,然后將其加載到控制器r中,然后調用start函數。Interbus驅動程序支持所有三張Interbus ISA卡,這在本節涵蓋Interbus控制器板的本節中已有介紹。
KRC控制器標配1024個輸入和輸出。通過修改文件$ Option.dat,可以將輸入和輸出增加到4096。INT $SET_IO_SIZE=2 ;存放 EA區(1=1024, 2=2048, 4=4096)
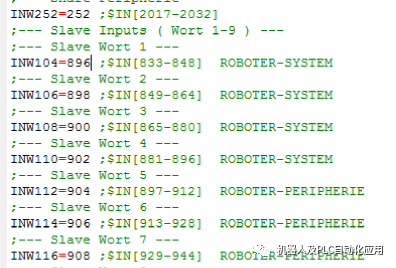
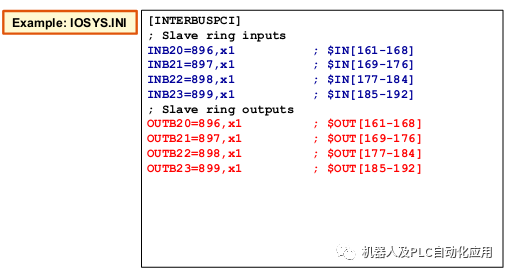
如果要訪問從屬接口的數據,則必須在Interbus側使用偏移量896或更大的值。
例如奧迪標準中是從833開始的:
PLC與機器人的IO點從833開始
;--- Slave Wort 1 ---
INW104=896 ;$IN[833-848] ROBOTER-SYSTEM 104*8=832起始位833
;--- Slave Wort 2 ---
INW106=898 ;$IN[849-864] ROBOTER-SYSTEM
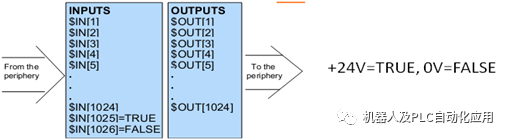
-PLC上的輸出是機器人上的輸入。
-PLC上的輸入是機器人上的輸出。
接口選項,KRC為主機和從機(3)
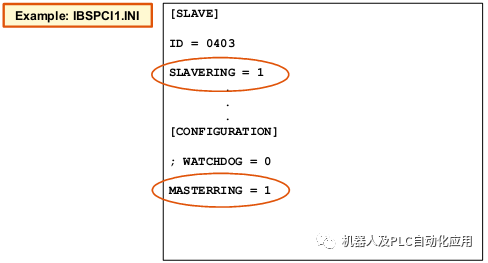
ID=09EB ;重板ID-16進制
09:位置1&2:過程數據長度字(16位), EB:位置3&4:作為總線設備的行為
SLAVERING=1 使用從板功能
WATCHDOG=1 看門狗功能
MASTERRING=1 使用主版(已連接I-Bus模塊)
[INTERBUS]這主要是用來通知驅動程序在控制器板上進行的硬件設置。
[SLAVE]該部分影響Interbus控制器板從屬部分的行為。
[CONFIGURATION]在此設置Interbus控制器板常規操作方法的各種參數。
[CMD_CONFIGURATION]此處,將Interbus卡設置為使用程序IBS CMD的任務。
[DIAGNOSTIC_REGISTERS]這些參數可以通過I / O系統的過程數據映像(無CMD配置)訪問卡的內部診斷寄存器。
[TASK]此部分可用于控制驅動程序的獨立性。
[NAMES] 通過在此處為Interbus網段和模塊分配名稱,可以使您的系統更加用戶友好,例如,發生錯誤時,此處存儲的文本將顯示在GUI的消息窗口中。
KRC僅是從站
只設置了從卡
審核編輯:劉清
-
plc
+關注
關注
5008文章
13167瀏覽量
462136 -
電源電壓
+關注
關注
2文章
986瀏覽量
23946 -
Profinet
+關注
關注
6文章
1069瀏覽量
23330 -
KUKA機器人
+關注
關注
4文章
143瀏覽量
9056
原文標題:KUKA C2機器人Interbus界面選項的(主-從)詳解
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
什么是工業機器人
【卡酷機器人】試用一:套件拆箱
玩偶秒變機器人:機器人皮了解一下?
機器人、協作機器人和移動機器人,你分的清楚嗎
桁架機器人核心配件介紹
使用旅游機器人需要注意哪些問題?
機器人Python仿真軟件介紹
主從異構手術機器人的運動誤差如何進行分析
KUKAC2機器人程序備份更改路徑






 工商網監
工商網監
評論