 河套IT TALK——TALK47:(原創)波士頓動力的Atlas最近又亮瞎了雙眼
河套IT TALK——TALK47:(原創)波士頓動力的Atlas最近又亮瞎了雙眼

關聯回顧
(原創)全圖說機器學習技術的發展歷史
(原創)全圖說機器人倫理的發展歷史
一次完成復雜任務的嘗試
一個月前,就在互聯網都在熱炒ChatGPT的時候,波士頓動力(Boston Dynamics)在官方油管頻道上發布了一個他們的招牌人形機器人(Humanoid)Atlas的實驗視頻。和之前展示的Atlas跑步、跳舞、翻跟頭的單純運動視頻不同,在這個視頻里,Atlas在一個更為復雜的作業環境中,接到了一個輔助人類工作的任務,然后Atlas利用身邊的簡單工具,巧妙地將任務完成。
Atlas大致將這個把工具包遞給高架上的工人的任務分解為以下幾個子任務來分別實現:
-
找到工具包,并拿起工具包,以及測算嘗試,根據自身的能力,做出判斷采用什么方式送給高架頂端的工人:是直接扔上高架?還是登陸到架子第二層再扔上去?又或者如何親手遞給架子最高處的工人?(這一步視頻中僅通過Atlas兩次來回的觀看來替代,在真實場景中,這個過程可能要復雜得多),本場景的動作應該僅僅是機器人演示編排的示例。
-
如果上述判斷選擇在架子第二層扔給工人,Atlas需要思考如何登到架子的第二層,以及通過什么工具實現這一點?(找到木板搭橋,以便能從臺階穿過木板,登陸到架子第二層)
-
拿起工具包,走上架子第一層,跳到第二層,轉身將工具包扔給工人。
-
意識到正前方有一個障礙物,將障礙物推下架子(這個應該是刻意設計的,因為Atlas本可以原路返回)。
-
通過推下去的箱子,跳到地面上(中間玩了一個變態把戲(Sick Trick)的空翻完美著地)。
視頻在十幾個小時內,觀看量達到了百萬人,很多網友感慨其動作的流暢性,很多人甚至說,自己都做不到Atlas這么完美,特別是最后的那個540度空翻,簡直是絕了。
外行看熱鬧,內行看門道,這短短80秒的視頻,到底展示了Atlas怎樣的黑科技呢?
完美表現背后的黑科技波士頓動力后來又發布了一個拍攝幕后花絮的視頻,透露了背后的一些技術細節:
具體實現,按照通常機器人組成劃分,主要包括感知、自治和執行三個部分。
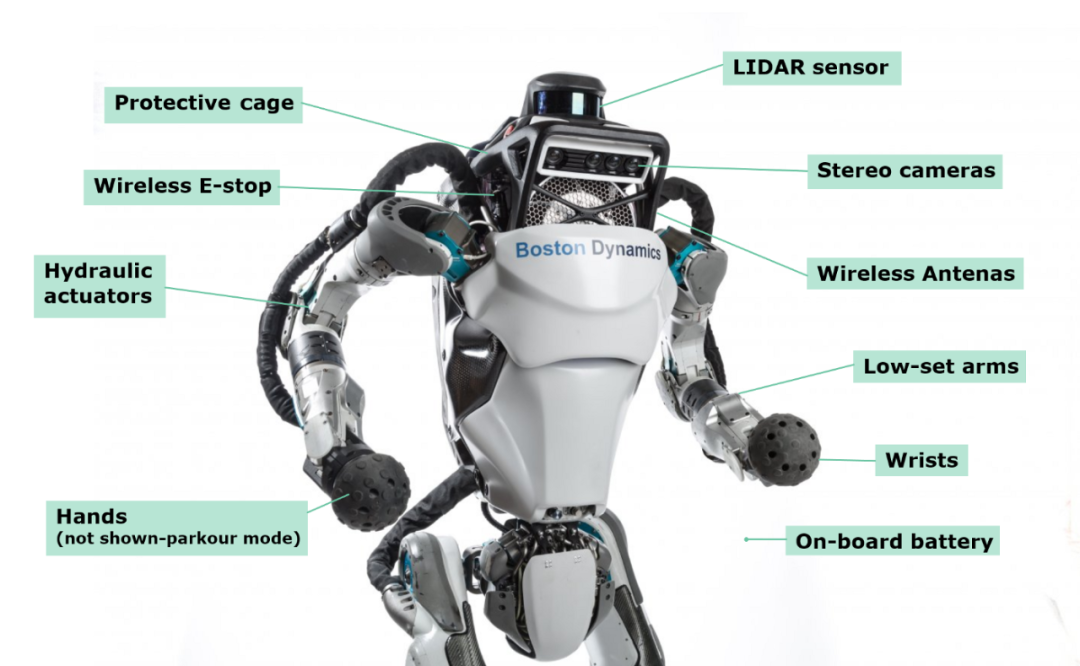
首先,就是感知能力。所謂的感知,就是環境預判和物品預判。除了檢測到周圍有什么物品之外,還需要去理解物體的屬性,包括它的形狀、重量、材質、擺放狀態等等,這就是感知能力(Perception)。Atlas感知周遭世界的方式,跟人類的眼球類似,但是并不完全相同。

?它的頭部有兩個攝像頭,一個是彩色相機,另一個則是深度相機,用稱為 LIDAR的技術通過飛行時間(Time of flight,縮寫TOF)來測量距離。通過發射納秒級的高功率光脈沖來捕獲相關場景的深度信息。借助 Atlas 的飛行時間深度相機,會以每秒 15 幀的速度從其環境中生成點云,這是一個距離測量的大集合。然后感知軟件使用多平面分割算法識別表面。依靠這兩個攝像頭,Atlas來尋找環境中的形狀和其他特征,來識別關鍵物體的信息。
其次,就是根據感知信息,自主理解意圖以確定該怎么行動。理解物品的屬性,還要去思考這個物體的狀況和自身能力的匹配,以及思考或者預判按照什么方式去操作這個物品,以達到其希望達到的目的,這就是自主(Automony)。舉個例子:人們在拿物品的時候,要掂量一下物品的重量,然后才能決定是用手直接抓起來,還是用雙臂去抬起來,以及如果太沉的物品,還要判斷是要先蹲下去再抬起來,以免傷到了腰椎。人拿物品運動的時候,也需要判斷,這個物品很輕,就可以拎著跑;如果很沉,就得慢慢托著走,急不得;如果太沉,還得背著,扛著,或者借助其他工具。人做到這個,也是從小在運動方面不斷訓練得到能力,機器人也是如此。這個視頻中,我們看到機器人在拿木板的時候,是小心翼翼地,動作并不劇烈,因為它要準確地把木板搭在梯子和架子之間,而拿工具包后,就跑著走了,而且在拎起工具包,它也有了一個基本判斷,就是知道這個物體是可以在架子第二層穩穩扔到架子頂部的,所有的這些都是模型預測的魅力。
模型預測,會通過軌跡優化來預判行為邏輯,需要的是之前訓練的技能庫來支撐,每次Atlas學習新的技能都會更新技能庫,然后根據前面感知系統獲取的數據,機器人會快速選擇到底以合適的行為來完成目標。復雜的行為會調動全身四肢的所有部件協調完成(比如空翻)。

最后,就是控制執行。能讓Atlas健步如飛,靈巧地跑動起來以及保證一切動作都能行如流水,一氣呵成,甚至能完成那個堪稱完美的后空翻,這都需要大量的機械自動化的能力,Atlas 高 1.52 m,重 86 kg,三臺車載計算機以及用于移動的電池驅動電動機。它的四肢全部由液壓驅動器提供動力,具有 28 個液壓接頭:每條腿 6 個,每只手臂 6 個,背部關節 3 個,頸部間距 1 個。Atlas 依靠其較低的手臂和腿部的自由度 (DOF) 保持平衡。手腕是多功能的,可以連接不同的手或工具,并增加了手腕旋轉的自由度以執行任務。?
前面我們提到了模型預測庫,其實是不精準的模型。一個簡單的模型會錯過關于機器人動力學的重要細節,但一個復雜的模型可能需要太多的計算才能實時運行。所以必須要在二者之間尋找一個平衡。機器人在具體動作后,它的控制器(也稱為模型預測控制MPC)會使用動態模型來預測運動在未來將如何發生細微的變化,然后利用優化算法來計算最佳移動策略和應急響應。這種應急響應會非常快速地調整機器人的姿態、機械器件的力量以及處理時間周期等等。比如同樣是從箱子上跳下來,具體箱子是40厘米高,還是50厘米高,MPC都會微調以應對具體的變化。機器人每個關節的運動、機器人每個連桿的動量,以及機器人施加在它攜帶或投擲的物體上的力。

540度的非對稱空翻,要比正常的跑酷復雜困難得多,因為這種扭曲增加了常規后空翻中不存在的不對稱性。不僅數學更復雜,而且在空翻過程中,Atlas還需要卷起胳膊和腿,并在合適的時機,再優雅地舒展開,并在落地過程中,迅速尋找合適體態以達到平衡。MPC在工作時候,使Atlas就像花樣滑冰運動員一樣,Atlas開始空翻動作時,它需要雙臂張開以存儲角動量,在空中翻滾過程中收緊雙臂雙腿盡可能縮成球形以增加旋轉角速度,然后在落地時再次張開雙臂雙腿以減輕落地速度和維系平衡,整個動作只需要不到一秒鐘。Atlas 控制團隊的軟件工程師 Robin Deits 在公司博客文章中說:“我們幾乎在機器人的每個關節中都使用了所有可用的力量。”。“這個技巧恰好是機器人能做的極限”。
相信這個視頻會讓很多人意識到,機器人幫助人類承接復雜繁重的體力勞動的時代應該不會很遙遠了。
但事實真的如此嗎?讓我們先理性回顧一下波士頓動力的歷史,再做判斷。
波士頓動力的前世今生??

相信,在機器人圈里沒有多少人不知道波士頓動力這個金字招牌,但是可能很少人知道這家公司真正的歷史背景。

如果尋根溯源,還要從馬克·雷伯特(Marc Raibert)說起。這位總是穿著Aloha襯衫的光頭大叔,現在已經74歲了。毫不夸張地說,馬克·雷伯特一輩子基本上都在堅持不懈地做一件事,就是多足機器人的研究。
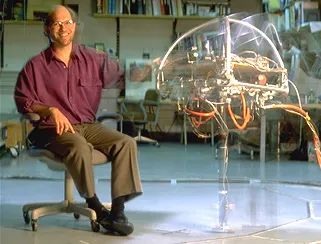
1973年,雷伯特獲得了東北大學電子工程學士學位,并于 1977 年獲得麻省理工學院博士學位。他的論文題目是“通過狀態空間模型進行電機控制和學習”。畢業后,在1977 年至 1980 年間,他在噴氣推進實驗室和加州理工學院從事機器人傳感和控制方面的工作。1980年轉到卡內基梅隆大學計算機科學系和機器人研究所任教并成立了腿部實驗室(CMU Leg)。1986年,他來到麻省理工學院繼續擔任電氣工程和計算機科學的教授,也把他的腿部實驗室直接搬了過去。下面的視頻,我們能看到這個實驗室早期的一些研究。
腿部實驗室幫助建立了高動態機器人的科學基礎。這些機器人的靈感來自于動物的敏捷、靈巧、感知和平衡感,以及優雅的動作。馬克·雷伯特在很多場合的演講都喜歡拿攀登陡峭山峰的山羊作為例子來闡述這個話題。他驚嘆于山羊在崎嶇不平的山崖上健步如飛的那種非凡力量,甚至小山羊都是如此,也在他的內心深處產生了一個夢想:將雙足和四足機器人技術推進到超自然狀態(advance bipedal and quadrupedal robotics to a supernatural state.)。而他不管是在腿部實驗室,還是后來成立波士頓動力,一直以來都堅定地地踐行他對這個夢想的追求。
超自然(supernatural )這個詞兒,帶有濃重的宗教色彩,原本是用在神秘主義中的。盡管雷伯特沒有進一步解釋這個詞的含義,但我理解他真正想表達的應該是奇跡,也就是超越多足動物原本的自然生理極限,跳得更高,跑得更快,運動的得更為靈活,以及能在更為嚴酷的自然環境中從容生存。
在當時那個時代,腿部實驗室的研究和當時主流機器人研究路徑完全不同,過于特立獨行、驚世駭俗。當時市面上大部分的機器人的運動特點都是非常緩慢的、穩健的、機械的、有板有眼的,而且這仿佛也成為工業化生產的機器人默認的共識。而腿部實驗室這種蹦蹦跳跳,很難站穩的單腿或者多腿跳躍機器人,無故障運行時間(MTTF)短到無法被商業資本賞識,在當時那個唯利是圖的時代,除了娛樂性的雜技表演,這個實驗室的研究成果實在看不到實用的、賺錢的應用前景,而經常被稱為華而不實,甚至嘩眾取寵。
1992年,馬克·雷伯特將腿部實驗室從MIT剝離出來,在國防高級研究計劃局(DARPA)的資助下(DARPA在美國是個神奇的存在,下次有機會好好聊一聊這個機構),成立了波士頓動力公司。盡管馬克·雷伯特當時在機器人腿部實驗室的研究已經搞了12年,而且得到了DARPA的資助,但他仍然不確定是否會繼續搞下去,上文也提到了,因為拉不到商用贊助,這個實驗室的研究仿佛在沙漠中行走,艱難且看不到成功的方向。
波士頓動力公司第一個合同是和美國海軍空戰中心訓練系統部(NAWCTSD)簽署的,用 DI-Guy 制作的交互式3D計算機模擬代替飛機發射操作的海軍訓練視頻,用于真實人體模擬的軟件。項目交付很成功。說白一點兒,如果沿著這個方向繼續走下去,波士頓動力很可能會成為一家建模和仿真公司,而不是機器人公司。
根據馬克·雷伯特的回憶,是索尼幫助他們堅定了信仰。波士頓動力接下來有一個契機,默默地給索尼工作了五年,并制作了一個從未見天日的寵物狗AIBO的原型,后來又幫助索尼研究了小型機器人QRIO,并幫助其開發了機器人編舞的工具。這些工作徹底喚醒了馬克·雷伯特對機器人的熱情,隨后,在DARPA的支持下,波士頓動力給BigDog寫了一份提案,并毫無懸念地很快獲得了批準。
馬克·雷伯特是一個不善于自我宣傳、甚至是抵制媒體的教授。給軍方做的BigDog項目視頻僅僅上傳到他們自己的網站上,骨子里的清高,讓他覺得過分地宣傳是不體面的一件事。2004年,有心的機器人愛好者把BigDog上傳到了油管上。在2008年,DARPA的50年周年晚宴上,馬克·雷伯特和DARPA 的負責人 托尼·特瑟(Tony Tether )介紹自己的時候,對方立即興奮地說:“BigDog,油管上三百五十萬瀏覽量!”他才明白,互聯網宣傳是多么的重要。同年,波士頓動力在油管上注冊了官方賬號,很快這個賬號就成了科技界的網紅。后面的故事,應該就是大家熟知的內容了。
獨特的企業座右銘和很多機器人公司以確保平均無故障時間 (MTTF)不同,波士頓動力并不把MTTF看的很重要。其他機器人公司因為擔心被高昂費用制造出來的機器人出故障,就會刻意把機器人的動作調慢,變得穩妥,也刻意減少外部干擾,讓機器人的工作環境達到最小變量,仿佛是對待溫室的花朵一般來開發、運行和維護。波士頓動力反其道而行之,不但在現實環境中訓練機器人,而且還刻意給機器人設計各種刁難的變量。
我們不僅僅看到這些機器人在沙漠、森林、河灘、沼澤、沙地、山坡、厚雪和冰面上行走、奔跑和摔跤,通過各式各樣的極端現實環境去磨練,更甚者,我們還在視頻中經常看到,測試員人為地給機器人制造額外的麻煩,比如用手推,用腳踹,用棒子捅,刻意改變物品的位置,故意使絆子。這種下狠手往往讓觀看視頻的網友對“受虐”的機器人產生同情,甚至覺得波士頓動力的測試員都是冷血變態,甚至有懂CGI的網友直接創造了Bosstown Dynamics的偽視頻,來諷刺波士頓動力對機器人的這種行為。這都是徹底誤會了這家公司的本意。之所以波士頓動力這么干,不擔心機器人出錯,不擔心磕磕碰碰,因為機器人摔壞了,可以再修,再改進,再測試,不斷調優,不斷進步,才能保證下次避免類似情況出現時機器人能從容應對。

波士頓動力這個座右銘是非常厲害的。這就仿佛教育孩子一樣,越嬌慣的孩子越養不好,越磨練的孩子越成事,是一個道理。如果我們最終的目的,就是讓機器人在現實世界紛繁復雜,不可預測的環境中從容生存,就應該教會他們如何應對各種各樣的意外。這種座右銘也和這家公司希望制造的機器人的初衷是吻合的。
波士頓動力的目標就是構建高機動性的機器人。他們想制造的機器人,是只要人能去的地方,這些機器人就都能去,甚至環境惡劣到人去不了的,這些機器人也能輕松應對。這就不是整潔有序的工廠和流水線了,而是廣袤無際未知的自然界和人造環境。這種環境中里,不可避免地需要靈巧地穿過陡峭的巖石小徑、泥濘的沼澤、光滑的冰面、拐來拐去的樓梯、狹窄雜亂的過道、擁擠的人流車流、五花八門各種類型的門,以及可能遭遇很多外在環境的突然改變,甚至是意圖不明的冒犯者。他們希望機器人最終會像人和動物一樣移動以及反應,那種在復雜運動中保持平衡快速應對的特質,能夠將自己的運動能力發揮到極致的一種優雅和栩栩如生。
酷炫技術與市場需求之間的巨大鴻溝與資本的無奈毫無疑問,波士頓動力這種對待測試機器人的這種粗暴和野蠻,背后意味著巨大的成本投入,這種燒錢的無底洞多少還是刺激了資本家們的神經。為了能持續在商業成果不夠顯著的波士頓動力上持續運作下去,這家命運多舛的公司,接連換過多個金主爸爸。
BigDog因為噪音過大無法商用,最終DARPA停止了對波士頓動力的資助。2013年12月13日,谷歌以未知價格收購,從DARPA接棒,不到4年,2017年6月8日,又以1.65 億美元的價格易手給軟銀,然后短短2年不到,軟銀又以11億美元的價格賣給了現代汽車集團。那么,現代集團是否會有足夠的耐心等待,并持續不斷地為它燒錢呢?如果賺錢問題不得到根本的解決,波士頓動力未來還是要免不了面對易主的命運。
從波士頓動力頻繁易主的現象,我們也能側面印證多足機器人產業化過程的不易。商業社會,一切都是以市場需求為導向的。從技術到市場,需要的不單單是成熟的技術、可控的產業鏈,還需要有“癢點”或者“痛點”需求相匹配。技術和市場之間,這個“癢點”或者“痛點”需求就是跨越二者鴻溝的橋梁。從這一點上來看,任何一家牛逼的技術公司,如果僅僅是炫技,是無法強扭市場來買單的。
需求問題解決不了,這個“癢點”或者“痛點”找不到,人們就會去自然地比較成本。拿Spot為例,目前每只Spot Mini的價格是74500美金,如果再需要配備一個酷炫的機器手臂,還需要再花38950美金。如果一個產業工人的價格,低于Spot的價格,而且效率還會更高,為什么工程隊要去買Spot呢?同樣,如果一個消防犬的成本和響應速度,遠優于Spot的時候,為什么消防隊要去買Spot呢?
只要那個多足機器人的運動能力上,達不到真正超越人類和自然生物的奇點,所有的相關研究,會一直被認為是一個燒錢的買賣。博得眼球沒有錯,但是要是市場需求上不來,規模化成本始終降不下去,那么必然市場也就打不開,故事講得再動聽,視頻拍得再酷炫,冷靜下來,還是要經受殘酷無情市場的鞭撻與考驗。
原文標題:河套IT TALK——TALK47:(原創)波士頓動力的Atlas最近又亮瞎了雙眼
文章出處:【微信公眾號:開源技術服務中心】歡迎添加關注!文章轉載請注明出處。
-
開源技術
+關注
關注
0文章
389瀏覽量
7914 -
OpenHarmony
+關注
關注
25文章
3661瀏覽量
16159
原文標題:河套IT TALK——TALK47:(原創)波士頓動力的Atlas最近又亮瞎了雙眼
文章出處:【微信號:開源技術服務中心,微信公眾號:共熵服務中心】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
Atlas轉型電驅,純電+AI正在加速通用人形機器人落地

廈門市開源芯片產業促進會R-Talk第12期成功舉辦

安波福入選BCG“2024年最具創新力企業”
廈門市開源芯片產業促進會R-Talk第10期成功舉辦
奇異摩爾攜手SEMiBAY Talk 邀您暢談互聯與計算
直線電機生產廠家談人形機器人迎來新奇點

波士頓動力人形機器人Atlas電動版亮相:前沿技術迎來新時代

所有操作層都接入AI,Menteebot給人形機器人發展帶來新思路
波士頓動力公司推出電動版Atlas機器人,展現卓越靈活性與敏捷性

波士頓動力推出全新純電動人形機器人,拓展運動范圍

波士頓動力公司宣布退役人形機器人Atlas
傳智教育聯合科大訊飛舉辦“AI開發者TALK”活動






 工商網監
工商網監
評論