 上位機下位機串口通信設計詳解
上位機下位機串口通信設計詳解
串行接口是一種可以將接受來自CPU的并行數據字符轉換為連續的串行數據流發送出去,同時可將接受的串行數據流轉換為并行的數據字符供給CPU的器件。一般完成這種功能的電路,我們稱為串行接口電路。
串口通信結構
串口通信是指外設和計算機間,通過數據信號線 、地線、控制線等,按位進行傳輸數據的一種通訊方式。這種通信方式使用的數據線少,在遠距離通信中可以節約通信成本,但其傳輸速度比并行傳輸低。
串口是計算機上一種非常通用的設備通信協議。大多數計算機(不包括筆記本電腦)包含兩個基于RS-232的串口。串口同時也是儀器儀表設備通用的通信協議;很多GPIB兼容的設備也帶有RS-232口。同時,串口通信協議也可以用于獲取遠程采集設備的數據。
RS-232(ANSI/EIA-232標準)是IBM-PC及其兼容機上的串行連接標準。可用于許多用途,比如連接鼠標、打印機或者Modem,同時也可以接工業儀器儀表。用于驅動和連線的改進,實際應用中RS-232的傳輸長度或者速度常常超過標準的值。RS-232只限于PC串口和設備間點對點的通信。RS-232串口通信最遠距離是50英尺。
串口通信
串口通信是在工程應用中很常見。在上位機與下位機通訊過程中常通過有線的串口進行通信,在低速傳輸模式下串口通信得到廣泛使用。在說個之前先來簡單解釋一下上位機與下位機的概念。
上位機與下位機設計
通常上位機指的是PC,下位機指的是單片機或者帶微處理器的系統。下位機一般是將模擬信號經過AD采集將模擬量轉換為數字量,下位機再經過數字信號處理以后將數字信號通過串口發送到上位機,相反上位機可以給下位機發送一些指令或者信息。常見的通信串口包括RS232、RS485、RS422等。這些串口只是在電平特性有所不同,在上位機與下位機進行數據通信時可以不考慮電平特性,而且現在在硬件上有各種轉接接口,使用起來也很方便。
當然在通常做簡單的串口UART實驗時我們可以使用各種各樣的串口助手小軟件,但是這些串口小工具有時候并不能很好滿足需求,那就嘗試著自己寫一套屬于自己的串口助手?接下來說說如何使用java實現上位機與下位機之間的RS485串口通信。
step 1:下載支持java串口通信的jar包,這里給出下載地址:
http://files.cnblogs.com/files/Dreamer-1/mfz-rxtx-2.2-20081207-win-x86.zip(32bit 下載地址)
http://files.cnblogs.com/files/Dreamer-1/mfz-rxtx-2.2-20081207-win-x64.zip (64位下載地址)
對以上的版本解釋一下,因為本人在這里踩了一個坑,32位或者64位是與ecplise/myecplise一致,要是版本弄錯了會報錯。
step 2:下載了那個jar包解壓后會出現以下內容:
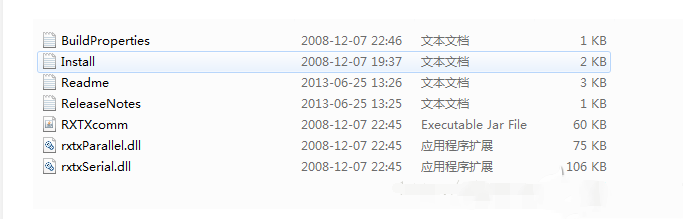
這個文件夾里面需要注意兩點:jar包RXTXcomm需要導入到java工程里面去。另外就是需要將rxtxParallel.dll與rxtxSerial.dll復制在安裝JDK的bin文件下和jre的bin文件夾下面,這樣才能保證能夠正常使用這個jar包。以下是將兩個dll文件復制的位置:
C:Program Files (x86)Javajdk1.8.0_25in
C:Program Files (x86)Javajdk1.8.0_25jrein12
怎么講jar包導入java工程里面就是比較簡單的操作,可以參考:http://jingyan.baidu.com/arTIcle/ca41422fc76c4a1eae99ed9f.html
step 3:RXTXComm Api如何使用
接下來就是使用該導入jar包進行編碼實現串口通信的功能了。在編碼之前先來理一理串口通信的主要環節,本人總結主要分為以下幾點:
1)計算機首先需要進行硬件check,查找是否有可用的COM端口,并對該對端口進行簡要判斷,包括這些端口是否是串口,是否正在使用。以下是部分主要代碼:
/*類方法 不可改變 不接受繼承
* 掃描獲取可用的串口
* 將可用串口添加至list并保存至list
*/
public staTIc final ArrayList《String》 uartPortUseAblefind()
{
//獲取當前所有可用串口
//由CommPorTIdenTIfier類提供方法
Enumeration《CommPortIdentifier》 portList=CommPortIdentifier.getPortIdentifiers();
ArrayList《String》 portNameList=new ArrayList();
//添加并返回ArrayList
while(portList.hasMoreElements())
{
String portName=portList.nextElement().getName();
portNameList.add(portName);
}
return portNameList;
}123456789101112131415161718
以下是測試類的測試實例:
ArrayList《String》 arraylist=UARTParameterSetup.uartPortUseAblefind();
int useAbleLen=arraylist.size();
if(useAbleLen==0)
{
System.out.println(“沒有找到可用的串口端口,請check設備!”);
}
else
{
System.out.println(“已查詢到該計算機上有以下端口可以使用:”);
for(int index=0;index《arraylist.size();index++)
{
System.out.println(“該COM端口名稱:”+arraylist.get(index));
//測試串口配置的相關方法
}
} 123456789101112131415
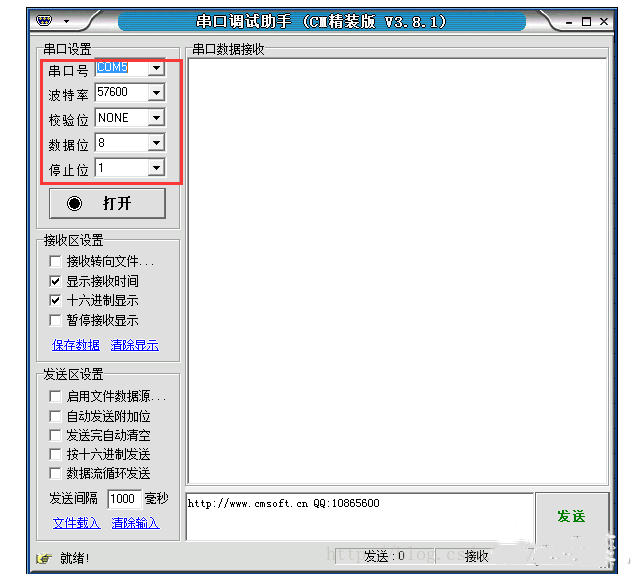
2)通過計算機對串口的自檢后,可以對串口參數進行簡單的配置。常見的配置可以從常見的串口助手中得到啟發。以下是一個串口助手的人機交換界面:
以下是對串口設置主要代碼:
/*
* 串口常見設置
* 1)打開串口
* 2)設置波特率 根據單板機的需求可以設置為57600 。。。
* 3)判斷端口設備是否為串口設備
* 4)端口是否占用
* 5)對以上條件進行check以后返回一個串口設置對象new UARTParameterSetup()
* 6)return:返回一個SerialPort一個實例對象,若判定該com口是串口則進行參數配置
* 若不是則返回SerialPort對象為null
*/
public static final SerialPort portParameterOpen(String portName,int baudrate)
{
SerialPort serialPort=null;
try
{ //通過端口名識別串口
CommPortIdentifier portIdentifier = CommPortIdentifier.getPortIdentifier(portName);
//打開端口并設置端口名字 serialPort和超時時間 2000ms
CommPort commPort=portIdentifier.open(portName,1000);
//進一步判斷comm端口是否是串口 instanceof
if(commPort instanceof SerialPort)
{
System.out.println(“該COM端口是串口!”);
//進一步強制類型轉換
serialPort=(SerialPort)commPort;
//設置baudrate 此處需要注意:波特率只能允許是int型 對于57600足夠
//8位數據位
//1位停止位
//無奇偶校驗
serialPort.setSerialPortParams(baudrate, SerialPort.DATABITS_8,SerialPort.STOPBITS_1, SerialPort.PARITY_NONE);
//串口配制完成 log
System.out.println(“串口參數設置已完成,波特率為”+baudrate+“,數據位8bits,停止位1位,無奇偶校驗”);
}
//不是串口
else
{
System.out.println(“該com端口不是串口,請檢查設備!”);
//將com端口設置為null 默認是null不需要操作
}
}
catch (NoSuchPortException e)
{
e.printStackTrace();
}
catch (PortInUseException e)
{
e.printStackTrace();
}
catch (UnsupportedCommOperationException e)
{
e.printStackTrace();
}
return serialPort;
}12345678910111213141516171819202122232425262728293031323334353637383940414243444546474849505152535455
以上代碼就是返回一個對象,同時也返回了對象屬性,因為對象在java里面是屬于傳值引用。對以上需要說明的是:在實驗時需要連接串口才能讓計算機檢測到才能讓程序工作,這里使用的是RS485轉接線:

3)通過以上兩個步驟后基本對串口的設置也完成了,對于串口類型的確認例如:RS232/RS485/RS422等,可以作為進一步確認的條件。RS485可以在gnu.io中找到。
接下來就是上位機與下位機之間的雙向通信的功能實現了。該部分主要是利用java的輸入輸出流來實現。以下是主要代碼:
/*
* 串口數據發送以及數據傳輸作為一個類
* 該類做主要實現對數據包的傳輸至下單板機
*/
class DataTransimit
{
/*
* 上位機往單板機通過串口發送數據
* 串口對象 seriesPort
* 數據幀:dataPackage
* 發送的標志:數據未發送成功拋出一個異常
*/
public static void uartSendDatatoSerialPort(SerialPort serialPort,byte[] dataPackage)
{
OutputStream out=null;
try
{
out=serialPort.getOutputStream();
out.write(dataPackage);
out.flush();
} catch (IOException e)
{
e.printStackTrace();
}finally
{
//關閉輸出流
if(out!=null)
{
try
{
out.close();
out=null;
System.out.println(“數據已發送完畢!”);
} catch (IOException e)
{
e.printStackTrace();
}
}
}
}
/*
* 上位機接收數據
* 串口對象seriesPort
* 接收數據buffer
* 返回一個byte數組
*/
public static byte[] uartReceiveDatafromSingleChipMachine(SerialPort serialPort)
{
byte[] receiveDataPackage=null;
InputStream in=null;
try
{
in=serialPort.getInputStream();
//獲取data buffer數據長度
int bufferLength=in.available();
while(bufferLength!=0)
{
receiveDataPackage=new byte[bufferLength];
in.read(receiveDataPackage);
bufferLength=in.available();
}
}
catch (IOException e)
{
e.printStackTrace();
}
return receiveDataPackage;
} 12345678910111213141516171819202122232425262728293031323334353637383940414243444546474849505152535455565758596061626364656667686970
通過以上關于Uart兩個基本類實現對底層Uart的功能封裝,其中一個類主要負責Uart串口自檢和基本設置,另外一個類主要has數據傳輸的兩個方法。接下來以一個實例說一說通過RS485串口通信將系統當前時間發送至單板機系統。
step 4:實現實時系統時間的數據包傳輸至下位機
這一步可以分為以下兩個步驟:首先實現獲取系統時間,將時間進行封裝成幀;另外就是通過RS485串口將時間數據包發送至單板機系統進行解析。
1) 系統時間的獲取
根據java面對對象設計思想,這里將有關系統時間的方法歸為一類。
以下是獲取當前系統時間代碼:
public static String getCurrentDateTime()
{
//單例模式
Calendar calendar=Calendar.getInstance();
int year = calendar.get(Calendar.YEAR);//獲取年份
int month=calendar.get(Calendar.MONTH);//獲取月份
int day=calendar.get(Calendar.DATE);//獲取日期
int minute=calendar.get(Calendar.MINUTE);//分
int hour=calendar.get(Calendar.HOUR);//小時
int second=calendar.get(Calendar.SECOND);//秒
String curerentDateTime = year + “ ” + (month + 1 )+ “ ” + day + “ ”+ (hour+12) + “ ” + minute + “ ” + second + “ ”;
timeCheckSum=year+(month+1)+day+(hour+12)+minute+second;
return curerentDateTime;
}1234567891011121314
java 提供了calender類,該類提供了一些與時間有關方法。至于Calendar.getInstance()使用單例模式獲取一個Calendar實例對象,單例模式就是一個類在任何時候只允許有一個實例化對象。獲取系統時間除了使用Calendar還可以使用Date類,通過創建對象也可以實現系統當前時間的獲取。timeCheckSum作為時間數據的校驗和發送至單板機作為自定義協議的一部分。
由于發送的數據包通常是以字節(byte)為單位進行發送和傳輸的,因此需要將int型的時間轉換為byte使用byte[]進行存儲,作為一個數據包發送。
/*
* 將以上時間字符串進行隔開用byte[]保存
*/
public static byte[] dateTimeBytesGet(String currenDateTime)
{
//對當前時間參數進行格式判斷
//對格式進行判斷
int rawDataSize=6;
byte[] dateTimeBytes=new byte[rawDataSize+1];
String[] currentDateTimeSplit=currenDateTime.split(“ ”);
if(currentDateTimeSplit.length==rawDataSize)
{
//時間數據格式正確
//eg 2016 12 23 22 18 26
//使用byte[]進行存儲時需要 -128~+127
//對于年份使用兩個byte存儲
for(int dataIndex=0;dataIndex《rawDataSize;dataIndex++)
{
int dateTemp=Integer.parseInt(currentDateTimeSplit[dataIndex]);
if(dataIndex==0)
{
byte H8bits=(byte)((dateTemp)》》8);
byte L8bits=(byte)((dateTemp)&0xff);
dateTimeBytes[dataIndex]= H8bits;
dateTimeBytes[dataIndex+1]= L8bits;
}
dateTimeBytes[dataIndex+1]=(byte)dateTemp;
}
}else
{
System.out.println(“當前時間獲取出現異常數據”);
System.exit(-1);
dateTimeBytes=null;
}
return dateTimeBytes;
}123456789101112131415161718192021222324252627282930313233343536
以上數據可以使用7個byte對時間數據進行存儲,因為年份需要使用兩個字節來存儲,格式為高字節在前,低字節在后,之后依次存放。
將時間數據存放在byte[]數組以后接下來就是添加自己的協議部分了。該部分具有較大的隨意性,因為該協議可以根據不同的風格有不同的形式。為了簡單起見,只需要在時間數據byte[]之前添加head、CMD、時間數據長度length這三個字節進行補充,時間數據byte[]后面依次添加校驗和高低字節以及tail指令即可。以上基本實現了一個簡單的時間數據package。以下是本模塊的代碼:
/*
* 將數組封裝成幀
* 每一個數據幀由以下幾個部分組成
* 1)數據包頭部 head 0X2F
* 2)數據包命令 CMD 0X5A
* 3)數據個數 length of data 7
* 4)校驗和 H8/L8 byte of check sum(高字節在前 低字節在后)
* 5)數據結尾標志 tail OX30
* 6)可采用線程進行獲取當前時間
*/
public static byte[] makeCurrentDateTimefromStringtoFramePackage(byte[] dateTimeBytes)
{
//在時間byte[]前后添加一些package校驗信息
int dataLength=13;
byte[] terimalTimePackage=new byte[dataLength];
//裝填信息
//時間數據包之前的信息
terimalTimePackage[0]=0x2F;
terimalTimePackage[1]=0X5A;
terimalTimePackage[2]=7;
//計算校驗和
//轉化為無符號進行校驗
for(int dataIndex=0;dataIndex《dateTimeBytes.length;dataIndex++)
{
terimalTimePackage[dataIndex+3]=dateTimeBytes[dataIndex];
}
//將校驗和分為高低字節
byte sumH8bits=(byte)((timeCheckSum)》》8);
byte sumL8bits=(byte)((timeCheckSum)&0xff);
terimalTimePackage[10]=sumH8bits;//高字節在前
terimalTimePackage[11]=sumL8bits;//低字節在后
//數據包結尾
terimalTimePackage[12]=0X30;
return terimalTimePackage;
}1234567891011121314151617181920212223242526272829303132333435
下面給出了將時間數據byte數組進行解析的debug代碼,一方面是確定上位機本部分模塊的程序可靠性,另外也可以直接移植到下位機對數據包的解析之中。在下位機解析過程中需要注意一點:因為在java中8大基本類型都是帶符號,年份時間和時間校驗和拆分為高低字節時,低字節是二進制無符號的,但是計算機卻是按照有符號數(補碼方式)進行讀取,例如在2016年轉換為二進制數為:11111100000,那么高字節為00000111,低字節為11100000。計算機讀取為:高字節為7,低字節為-32。其實由兩個byte真實還原的過程應為:7《《8+(低字節二進制數字)=7*256+224=2016,因此在debug解析時間數據包時需要將有符號數字轉換為無符號數字。
/*
* 對時間格式進行解析并還原原來的時間格式
* 對數據進行還原
* 僅限于debug使用
*/
public static String dateTimeBytesfromTostring(byte[] currentDateTime)
{
String string=“”;
if(currentDateTime.length==7)
{
string=((currentDateTime[0]《《8)+bytetoUnsigendInt(currentDateTime[1]))+“ ”+currentDateTime[2]+“ ”+
currentDateTime[3]+“ ”+currentDateTime[4]+“ ”+currentDateTime[5]+“ ”+
currentDateTime[6];
}
return string;
}
/*
* 將byte轉化為字符串
* 將有符號byte轉化為無符號數字
* debug使用
*/
public static int bytetoUnsigendInt(byte aByte)
{
String s=String.valueOf(aByte);
//System.out.println(s);
int bytetoUnsigendInt=0;
for(int i=0;i《s.length();i++)
{
if(s.charAt(i)!=‘0’)
{
bytetoUnsigendInt+=1《《(7-i);
}
}
return bytetoUnsigendInt;
}12345678910111213141516171819202122232425262728293031323334353637
2)將最后的時間數據包通過RS485串口發送至下位機
結合前面的串口程序就可以使用串口發送程序了。在程序debug的前期可以在程序的關鍵位置輸出日志就是打印log的方法可以提高程序調試的效率。以下是主類的測試代碼:
//取出第一個COM端口進行測試
SerialPort serialPort=UARTParameterSetup.portParameterOpen(arraylist.get(0), 57600);
//退出程序 后續不需要監測 因為transimit一直需要保證連接狀態
//System.exit(0);
DataTransimit.uartSendDatatoSerialPort(serialPort, dataFrame);
String currentDateTime=SystemDateTimeGet.getCurrentDateTime();
System.out.println(currentDateTime);
byte[] bytes=SystemDateTimeGet.dateTimeBytesGet(currentDateTime);
//System.out.println(Arrays.toString(bytes));
String str=SystemDateTimeGet.dateTimeBytesfromTostring(bytes);
System.out.println(str);
//System.out.println(SystemDateTimeGet.bytetoUnsigendInt((byte) -32));
byte[] terimalTimeByte=SystemDateTimeGet.makeCurrentDateTimefromStringtoFramePackage(bytes);
System.out.println(Arrays.toString(terimalTimeByte));
DataTransimit.uartSendDatatoSerialPort(serialPort, terimalTimeByte);123456789101112131415
以下是測試結果:
當沒有串口設備接入計算機時控制臺打印一條信息:
沒有找到可用的串口端口,請check設備!
12
當RS485設備接入計算機時,控制臺打印消息如下:
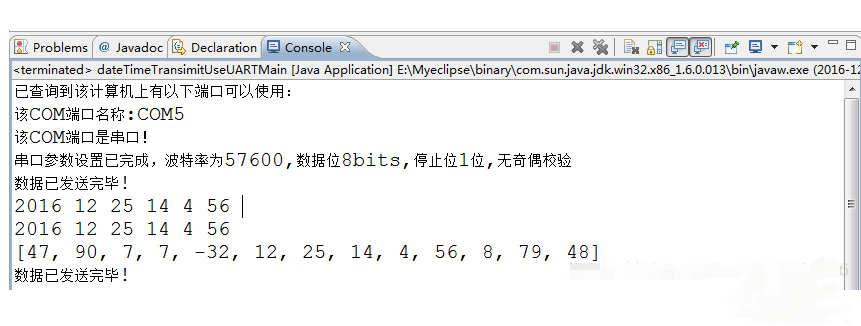
通過以上幾個步驟基本實現了上位機與下位機串口通信的功能,接下來還可以對程序進行改進:
1)添加界面,可以類比串口助手界面根據自身需要設計獨具風格的人機交互界面。
2) 在程序中添加線程,在以上程序中對于系統時間的獲取可以通過線程的方式進行獲取,這樣上位機就可以一直往下位機發送數據包,而不是僅僅發一次。
3)對于上位機數據接收,除了以上最基本的接收功能外,還可以使用JDBC與mysql等數據進行存儲,并繪畫數據曲線實現特性分析。
審核編輯:湯梓紅
-
cpu
+關注
關注
68文章
10696瀏覽量
209310 -
uart
+關注
關注
22文章
1199瀏覽量
100821 -
串口通信
+關注
關注
34文章
1601瀏覽量
55228 -
上位機
+關注
關注
27文章
927瀏覽量
54546 -
下位機
+關注
關注
0文章
93瀏覽量
18680
原文標題:上位機下位機串口通信設計詳解
文章出處:【微信號:直觀學PLC,微信公眾號:直觀學PLC】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
實現基于Qt的上位機與下位機進行串口通信
上位機下位機串口通信設計詳解
上位機和MYSQL連接_上位機下位機串口通信設計詳解

上位機與下位機通信





 工商網監
工商網監
評論