") 在存在噪音的情況下改善磁卡讀取
在存在噪音的情況下改善磁卡讀取
大多數(shù)磁性讀頭數(shù)據(jù)手冊(cè)沒有完全指定頻率相關(guān)元件,并且在指定其他關(guān)鍵參數(shù)時(shí)通常含糊不清。在某些情況下,來自兩個(gè)不同制造商的兩個(gè)非常相似的磁頭的規(guī)格在指定和省略的參數(shù)方面可能大不相同。數(shù)據(jù)手冊(cè)的局限性使得設(shè)計(jì)最佳的讀卡系統(tǒng)變得不必要地困難和耗時(shí)。本文檔概述了克服上述缺點(diǎn)的策略,并提供了克服噪聲問題的指南。
介紹
任何磁卡讀卡器 (MCR) 系統(tǒng)最關(guān)鍵的部件之一是磁讀頭 (MRH)。刷卡時(shí),MRH將卡磁條中存儲(chǔ)的數(shù)據(jù)轉(zhuǎn)換為電壓。其他MCR模塊處理轉(zhuǎn)換后的電壓以提取存儲(chǔ)的數(shù)據(jù)。一張卡與另一張卡之間的磁場(chǎng)強(qiáng)度差異很大,一個(gè)人到另一個(gè)人的刷卡速度差異使得設(shè)計(jì) MCR 并非易事。
MRH數(shù)據(jù)手冊(cè)增加了MCR設(shè)計(jì)的難度,這些數(shù)據(jù)手冊(cè)沒有完全指定頻率相關(guān)元件,并且在指定其他關(guān)鍵參數(shù)時(shí)往往含糊不清。在某些情況下,來自兩個(gè)不同制造商的兩個(gè)非常相似的探頭的數(shù)據(jù)手冊(cè)規(guī)格在指定參數(shù)列表和省略參數(shù)列表中有很大差異。當(dāng)您試圖最大限度地減少M(fèi)CR系統(tǒng)中的噪聲問題時(shí),這些差異尤其麻煩和令人不安。它們無疑使設(shè)計(jì)最佳的讀卡系統(tǒng)變得不必要地困難和耗時(shí)。本文概述了解決這些規(guī)范問題的策略,然后解釋了如何使用針對(duì)該任務(wù)優(yōu)化的安全微控制器來優(yōu)化和克服MCR中的噪聲問題。
磁條卡基礎(chǔ)知識(shí)
圖 1 顯示了具有三個(gè)磁道的磁條卡。一些 ISO/IEC1 標(biāo)準(zhǔn)定義了重要的卡屬性,例如物理尺寸、條紋的確切位置、磁性屬性和磁軌數(shù)據(jù)結(jié)構(gòu)。軌道 1 標(biāo)準(zhǔn)由國(guó)際航空運(yùn)輸協(xié)會(huì) (IATA) 創(chuàng)建。軌道2標(biāo)準(zhǔn)由銀行業(yè)(美國(guó)銀行家協(xié)會(huì),ABA)創(chuàng)建,軌道3標(biāo)準(zhǔn)由儲(chǔ)蓄行業(yè)創(chuàng)建。
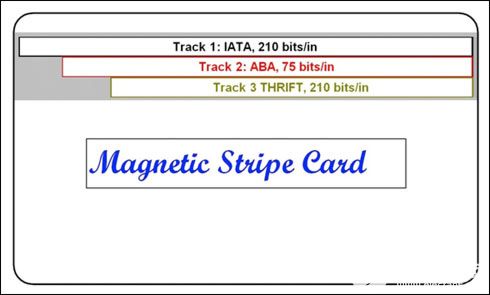
圖1.磁條卡。
雙頻相干相位(F2F)技術(shù)用于對(duì)磁條卡上的數(shù)據(jù)進(jìn)行編碼。如圖2所示,二進(jìn)制數(shù)據(jù)通過磁化具有不同極性的條紋區(qū)域沿軌道進(jìn)行編碼。躍遷的極性是任意的,因?yàn)橹挥熊S遷之間的相對(duì)空間意味著二進(jìn)制 1 或二進(jìn)制 0。
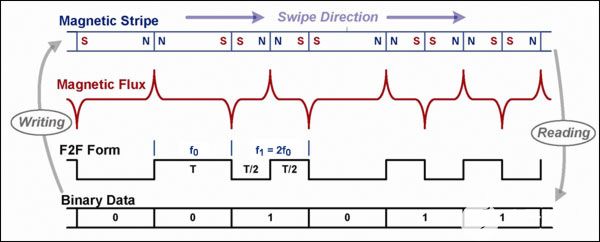
圖2.F2F 編碼和解碼波形。
二進(jìn)制 0 使用兩個(gè)單位的條形磁鐵進(jìn)行編碼,而一對(duì)一個(gè)單位的條形表示二進(jìn)制 1。每個(gè)位在條帶上占據(jù)相同的物理長(zhǎng)度。在其長(zhǎng)度中間具有額外通量躍遷的位是二進(jìn)制 1。
采用F2F編碼的連續(xù)信號(hào)的頻譜包含兩個(gè)基頻,f0和 f1,其中 f0是二進(jìn)制 0 和 f 的方波的基本數(shù)1= 2f0是二進(jìn)制 1 的方波的基礎(chǔ)。因此,名稱為F2F。二進(jìn)制 0 波形的平均幅度是二進(jìn)制 1 波形 A 的兩倍0= 2A1.
圖 3 顯示了歸一化為 f 的 F2F 編碼二進(jìn)制 0 和 1 的組合頻譜0.請(qǐng)注意,大部分信號(hào)能量位于f之間0和 3F0.因此,要獲得包含一系列 F2F 編碼二進(jìn)制 1 和 0 的矩形波形的良好近似值,恢復(fù)兩個(gè)基本波 (f0和 f1) 和 f 的三次諧波0.
圖3.F2F 編碼二進(jìn)制 0 和 1 的頻譜。
此外,由于二進(jìn)制模式不同,f以下還會(huì)有其他組件0.然而,我們可以從傅里葉分析中看到,隨著頻率的降低,這些分量的振幅會(huì)迅速減小。因此,帶寬從0.5f0至 3F0足以恢復(fù) F2F 編碼的矩形波形2。
估計(jì) f 的最小和最大比特率0和 f1,我們需要知道滑動(dòng)速度范圍和軌道記錄密度。根據(jù)ISO/IEC標(biāo)準(zhǔn),軌道1和3的記錄密度為210位/英寸(8.27位/毫米),而軌道2的記錄密度為75位/英寸(2.95位/毫米)。
用于計(jì)算 f0,分鐘我們采用支持的最慢滑動(dòng)速度并將其乘以軌道 2 密度數(shù)字。對(duì)于 f1,最大我們選擇支持的最快滑動(dòng)速度,并將其乘以軌道 1 或 3 的密度。
對(duì)于 2 英寸/秒至 100 英寸/秒(5 厘米/秒至 254 厘米/秒)的目標(biāo)滑動(dòng)速率,范圍為 f0和 f1值計(jì)算如下:
軌道 1 和 3:f0,分鐘= 0.42kbps 和 f1,最大= 42kbps
軌道 2: f0,分鐘= 0.15kbps 和 f1,最大= 15kbps
了解 f 的重要性0,分鐘和 f1,最大一旦我們有了MRH模型并研究其傳遞函數(shù),就會(huì)變得清晰。
磁性讀頭和讀卡器基礎(chǔ)知識(shí)
將磁條卡刷過靜止的MRH會(huì)導(dǎo)致磁通量發(fā)生變化,從而產(chǎn)生移動(dòng)的電場(chǎng)。因此,在MRH的輸出端感應(yīng)出電壓。圖2可用于研究讀取過程。從頂部開始,經(jīng)過MRH的磁條會(huì)導(dǎo)致磁通事件的變化,從而在MRH的輸出端子上感應(yīng)出電壓。沒有任何電損耗的開路回讀電壓由眾所周知的表達(dá)式給出:3

其中:
E(/x.) = 開路電壓
K = 與磁條速度、磁頭寬度和 MRH 中線圈匝數(shù)的影響相關(guān)的常數(shù)
H(x, y) = 讀頭的場(chǎng)函數(shù)
M[(x - /x.), y] = 磁條材料磁化
y1 = 磁條頭部到頂部的間距
y2 = 磁條從頭部到底部的間距
顯然,上述公式非常復(fù)雜,對(duì)于電路分析和設(shè)計(jì)來說不是很直觀。我們可以使用基本原理來確定模型,如下所示。
MRH將磁能轉(zhuǎn)換為電能。由于MRH的輸入是變化的磁場(chǎng),其輸出是變化的電場(chǎng),因此模型應(yīng)至少包含一個(gè)電感元件Lh和一個(gè)電容元件 Ch.在實(shí)際系統(tǒng)中,轉(zhuǎn)換過程中總是會(huì)消耗一些能量。因此,模型還必須包含一個(gè)電阻元件 Rh.在實(shí)踐中,MRH 不僅具有 Ch在其兩個(gè)端子上,但它也將具有外部阻抗Zo,例如,來自連接線、PCB 走線、IC 引腳、探頭等。
對(duì)應(yīng)于第 n次諧波頻率 f 的模型n,如圖 4a 所示,然后簡(jiǎn)化為圖 4b。3, 4, 5圖2b中二階電路的傳遞函數(shù)很容易計(jì)算如下:

圖4.等效的 MRH 模型。
請(qǐng)注意,上述傳遞函數(shù)不包含任何機(jī)械或磁性術(shù)語(yǔ),例如滑動(dòng)速度、頭部幾何形狀、頭部和條紋分離以及條紋磁性。因此,傳遞函數(shù)對(duì)于電路設(shè)計(jì)來說更加直觀。
為了進(jìn)一步簡(jiǎn)化,我們建議使用以最高系統(tǒng)頻率為特征的集總模型,而不是將模型限制為滑動(dòng)速度。
接下來,我們比較一些領(lǐng)先制造商的MRH的電氣規(guī)格。表 1 列出了圖 4b 模型所需的關(guān)鍵規(guī)格。請(qǐng)注意不同的細(xì)節(jié)量。雖然制造商A和C都指定了幾個(gè)電氣參數(shù),但制造商B只指定了一個(gè):峰峰值頭讀數(shù)電平。
| 參數(shù) | Manufacturer A | Manufacturer B | Manufacturer C |
| VO(P-P)(毫伏) | 20 | 19 | 35 |
| Lh(兆赫) | 25 | — | 110 |
| Ch(pF) | — | — | — |
| Rh(Ω) | 110 | — | 280 |
關(guān)于缺少的信息,可能會(huì)出現(xiàn)以下問題。
磁頭電感(Lh).L 如何h在更大的頻率范圍內(nèi)表現(xiàn)?L 如何h在承載非指定電流時(shí)的行為?
磁頭直流電阻 (Rh).整個(gè)頭部端子施加的電壓等級(jí)是多少?
磁頭讀取輸出電平(VO(P-P)).使用什么類型的測(cè)試卡?刷卡速度是多少?頭部的負(fù)荷是多少?
磁頭電容 (Ch).兩個(gè)頭部端子之間的電容是多少?它會(huì)隨著頻率而變化嗎?
為了理解上述參數(shù)的重要性,我們檢查傳遞函數(shù)的分母,并通過將其設(shè)置為零來找到其根:

為了使表達(dá)式保持簡(jiǎn)單并更好地理解二階行為,幾本網(wǎng)絡(luò)分析書籍6, 7使用標(biāo)準(zhǔn)形式編寫方程式。一個(gè)標(biāo)準(zhǔn)使用的形式是:
S2 + 2α × S + Ωo2 = 0
其根源是:

其中:
α是阻尼衰減:
ωo是共振頻率:
因此,取決于 α 和 ω 的值o,自然反應(yīng)的根源可以是真實(shí)的、復(fù)雜的或虛構(gòu)的。對(duì)于熟悉其他標(biāo)準(zhǔn)形式的讀者,我們現(xiàn)在將阻尼系數(shù)定義為 ζ = α/ωo(注意:品質(zhì)因數(shù)Q = 1/2ζ)并使用其他標(biāo)準(zhǔn)形式:
S2 + 2ΖΩo× s + ωo2 = 0
其根源是:

當(dāng)對(duì)系統(tǒng)施加非零強(qiáng)制函數(shù)(如階躍、斜坡或脈沖)時(shí),根在 s 平面中的位置直接影響建立行為。圖5顯示了在t = 0時(shí)施加階躍時(shí)各種ζ值的建立行為。具體而言,建立行為分類如下:
ζ > 1 overdamped
ζ < 1 ?underdamped
ζ = 1 critically damped
ζ = 0 undamped or oscillatory
圖5.各種ζ值的MRH輸出電壓。
從圖5中,我們觀察到在欠阻尼系統(tǒng)中會(huì)發(fā)生振鈴,這可能導(dǎo)致由于假峰值和假過零而導(dǎo)致讀數(shù)錯(cuò)誤。但是,如果系統(tǒng)嚴(yán)重過阻尼,則建立緩慢可能會(huì)產(chǎn)生時(shí)序誤差,峰值偏移可能會(huì)產(chǎn)生讀數(shù)誤差。在分析了MRH的時(shí)域行為之后,我們接下來看看它的頻域行為。
圖6顯示了傳遞函數(shù)的頻率響應(yīng),Tn(s),歸一化為其共振頻率 ωo.當(dāng)我們接近系統(tǒng)諧振頻率時(shí),我們觀察到峰值。這是由于圖4b所示電路的固有性質(zhì),即并行RLC。根據(jù)滑動(dòng)速度,此峰值也可能導(dǎo)致讀取錯(cuò)誤。
圖6.傳遞函數(shù)的頻率響應(yīng)。
回想一下,當(dāng)嘗試恢復(fù) F2F 編碼的二進(jìn)制數(shù)據(jù)時(shí),我們需要兩個(gè)基本頻率,f0和 f1,至少是f的三次諧波0.從圖3可以看出,大部分信號(hào)能量都在0.5f附近0至 3.5F0,而一小部分在6F左右0.
如果獲得更高的諧波,恢復(fù)的F2F波形會(huì)發(fā)生什么情況?從傅里葉分析中我們知道,恢復(fù)的波形形狀會(huì)隨著較高諧波系數(shù)的大小變化而變化。因此,在某些情況下,圖5所示的增益峰值可能會(huì)達(dá)到3次和6次諧波被放大到恢復(fù)信號(hào)嚴(yán)重失真的水平。任何導(dǎo)致假峰和過零的失真都會(huì)導(dǎo)致讀數(shù)錯(cuò)誤。
圖7強(qiáng)調(diào)了上述觀點(diǎn),圖<>以數(shù)學(xué)方式顯示了高諧波下兩種不同增益的MRH輸出電壓:藍(lán)色常亮表示單位增益,紅色表示增益為<>。黑色虛線是 ZX 遲滯極限。顯然,隨著增益加倍,紅色的MRH輸出信號(hào)顯示出更多的失真、假峰值和過零。
圖7.增益峰值引起的MRH輸出電壓失真。
此外,MRH不僅會(huì)因刷卡速度的變化而受到干擾。它還會(huì)看到整個(gè)系統(tǒng)中可能存在的更高頻率的干擾,例如高頻系統(tǒng)時(shí)鐘。由于增益峰值,這也可能導(dǎo)致信號(hào)失真和可能的讀數(shù)錯(cuò)誤。因此,為了設(shè)計(jì)最佳的讀卡系統(tǒng),了解MRH在刷卡速率之外的頻率行為至關(guān)重要。必須至少在最高系統(tǒng)頻率下表征MRH頻率行為。
表征各種讀頭
我們 使用 市售 阻抗 / 增益 相位 分析 儀 來 查找 不同 制造 商 的 多個(gè) MRH 的 等效 電路。表征包括基于DeepCover安全微控制器(MAXQ1740)的MCR中使用的單軌、雙軌和三軌MRH。由于12MHz是MAXQ1740的最大系統(tǒng)時(shí)鐘頻率,因此每個(gè)MRH的特性范圍為100Hz至12MHz(100Hz是分析儀的極限)。表2顯示了三軌MRH的參數(shù)平均值。?
| Parameter | MRH 1 | MRH 2 | MRH 3 | MRH 4 |
| Lh(兆赫) | 13.67 | 58.09 | 13.20 | 57.43 |
| Ch(pF) | 22.15 | 31.11 | 20.60 | 16.97 |
| Rh(Ω) | 146.78 | 234.57 | 145.72 | 214.51 |
分析測(cè)量參數(shù)
比較表2中的參數(shù),我們發(fā)現(xiàn)MRH 1和MRH 3非常相似。它們參數(shù)之間的相對(duì)差異為:ΔLh~ 3.6%, δrh~ 0.7%, 和 ΔCh~ 7.5%。對(duì)于 MRH 2 和 MRH 4,其參數(shù)的相對(duì)差異為:ΔLh~ 1.2%, δrh~ 9.4%, 和 ΔCh~ 83%。由于 Ch影響α和 ωo,對(duì)于類似的條件,我們可以預(yù)期 MRHs 1 和 3 的行為非常相似。我們可以預(yù)期MRHs 2和4的行為會(huì)低于它們的共振頻率,但隨著頻率接近和超過它們各自的共振點(diǎn),它們會(huì)發(fā)生變化。
當(dāng)我們繪制表征MRH的傳遞函數(shù)頻率響應(yīng)時(shí),最后兩點(diǎn)變得很明顯,如圖8所示。圖8中的負(fù)載為1G,阻尼比為0.03。MRHs 1 和 3 的圖幾乎相同,而 MRHs 2 和 4 的圖顯示諧振頻率差異越來越大。如前所述,幅度的增加可能會(huì)導(dǎo)致讀取錯(cuò)誤。
圖8.MRH傳遞函數(shù)與1GΩ外部負(fù)載下的頻率的關(guān)系(ζ = 0.03)。
圖9顯示了150kHz至300kHz頻率范圍內(nèi)的MRH傳遞函數(shù),即對(duì)應(yīng)于最大刷卡速率3in/s(6cm/s)的100次和254次諧波。我們可以看到,隨著滑動(dòng)速率的增加,MRH傳遞函數(shù)幅度值也會(huì)增加。這里的主要問題是,如果獲得更高的諧波超過一個(gè)點(diǎn),可能會(huì)出現(xiàn)錯(cuò)誤的過零和峰值,如圖7所示。此外,如果大于最大允許的信號(hào)出現(xiàn)在磁頭和讀卡器輸入之間的接口上,則可能會(huì)發(fā)生讀取錯(cuò)誤。
有兩個(gè)因素會(huì)導(dǎo)致信號(hào)較大。首先,更快的滑動(dòng)會(huì)增加磁通量變化的速度。根據(jù)法拉第定律,這會(huì)產(chǎn)生更大的電感電壓,從而導(dǎo)致更大的電感電流。其次,根據(jù)歐姆定律,流過較大阻抗的較大電流會(huì)產(chǎn)生較大的輸出電壓。
在刷卡速率范圍內(nèi),我們需要將峰值限制在小于或等于20,這是MAXQ1740磁卡讀卡器的最大和最小增益之比。圖9顯示,MRHs 1和3的阻抗變化小于20,但MRH 2和MRH 4的變化接近30,超過了20的限制。
圖9.MRH傳遞函數(shù)與3次和6次諧波頻率范圍的關(guān)系。
如果在MRH的輸出端增加一個(gè)阻尼電阻會(huì)發(fā)生什么?圖10顯示了三個(gè)任意不同的外部負(fù)載值的傳遞函數(shù)圖:100kΩ、10kΩ和1kΩ。我們?cè)趫D10中看到,對(duì)于低阻值的外部電阻,與圖9所示相比,峰值有所降低。請(qǐng)注意,對(duì)于1kΩ負(fù)載,所有四個(gè)MRH的三次諧波增益都會(huì)嚴(yán)重降低。這可能是一個(gè)問題。對(duì)于 3k 負(fù)載,對(duì)于 MRHs 100 和 2,增益在 3 次諧波處達(dá)到峰值,而對(duì)于 MRHs 3 和 2,增益在 3 次諧波處達(dá)到峰值。這里的重點(diǎn)是我們不能隨意選擇 Ro值。
圖 10.不同外部負(fù)載值的MRH傳遞函數(shù)。
使用外部電阻器 R 時(shí)o在MRH端子上,確保阻尼比(ζ)盡可能接近單位非常重要。圖 11 繪制了 ζ 與 R 的關(guān)系圖o對(duì)于四種特征的MRH。對(duì)于 ζ = 1,我們需要 RoMRHs 12 和 1 的≈ 3kΩ;Ro≈ MRH 22 為 2kΩ;和 RoMRH 28 的≈ 4kΩ。圖12顯示了具有最佳負(fù)載值的傳遞函數(shù)。將圖12與圖10進(jìn)行比較,我們注意到增益在三次諧波處沒有達(dá)到峰值,而是接近單位。
圖 11.MRH 阻尼系數(shù) (ζ) 與外部電阻 (Ro).
圖 12.MRH傳遞函數(shù)可實(shí)現(xiàn)最佳外部負(fù)載。
雖然最大 Ro由 ζ = 1 設(shè)置,最小值 Ro值取決于支持的最小信號(hào)和磁頭直流電阻,Rh.作為一般規(guī)則,保留 Ro≥ 5Rh使 Ro與 R 并行h不會(huì)使磁頭輸出信號(hào)衰減超過20%。
這里有幾個(gè)關(guān)鍵點(diǎn)需要記住。首先,由于并聯(lián)RLC,傳遞函數(shù)在諧振頻率ωo.因此,將此峰值限制在刷卡速率的3次和6次諧波對(duì)應(yīng)的范圍內(nèi),例如,對(duì)于150kHz至300kHz的刷卡速率范圍,42kHz至50kHz。其次,可以通過放置R來調(diào)整系統(tǒng)行為o穿過讀頭器的終端。更改 Roζ更改阻尼比。最后,選擇 Ro值使系統(tǒng)臨界阻尼,并讓引線布線和PCB布線設(shè)置Co價(jià)值。
優(yōu)化讀卡
現(xiàn)在使用一種解決MRH規(guī)格差異的方法,我們可以提高讀卡性能。我們的重點(diǎn)是減少主要影響過零(ZX)的噪聲的影響。在整個(gè)頻率范圍內(nèi)表征MRH模型后(注意:表征必須包括引線和PCB布線),我們遵循以下步驟。
第 1 步。選擇一個(gè) Ro值以獲得適當(dāng)?shù)淖枘岜炔⑾拗圃鲆娣逯怠?/p>
通常,目標(biāo)應(yīng)是臨界阻尼到略微過阻尼的系統(tǒng)。作為例外,如果在某些情況下,三次諧波的增益降至一半以下,那么我們可以通過稍微欠阻尼的系統(tǒng)來均衡增益。
欠阻尼系統(tǒng)可能會(huì)引入輸入信號(hào)振鈴產(chǎn)生的噪聲。振鈴噪聲會(huì)對(duì)ZX產(chǎn)生不利影響,但也可能導(dǎo)致增益峰值引起的假峰值。
保持 Ro≥ 5Rh最大 Ro設(shè)置ζ = 1。
第 2 步。在嘈雜的印刷電路板(PCB)上,它有助于使系統(tǒng)過阻尼,尤其是軌道2(T2)。
T2 有 40 個(gè)數(shù)字,而 T79/T1 有 3 個(gè)字母數(shù)字字符。
在T2上,噪聲會(huì)影響ZX的峰值之間存在較長(zhǎng)的間隙。
過阻尼集成了 T2 信號(hào)。信號(hào)接近鋸齒波形,如圖13所示。過阻尼通過過濾掉高頻毛刺來幫助ZX。
保持 Ro≥ 5Rh使磁頭衰減保持在20%以下。
需要注意的是:過度阻尼的系統(tǒng)可能會(huì)由于建立緩慢和峰值偏移而導(dǎo)致誤差。
第 3 步。如果使用較便宜但噪聲較大的讀頭,則通過降低輸入信號(hào)來克服噪聲,而不會(huì)影響阻尼比。
選擇合適的 Ro.
除以 Ro分成更小的段,使總 Ro與步驟 1 中相同。
使用適當(dāng)?shù)某轭^獲取所需的信號(hào)分頻。
有幾種方法可以做到這一點(diǎn),如下面的實(shí)際示例部分所述。
第 4 步。當(dāng)MAXQ1740的讀頭輸出超過300mV時(shí)Q-1,發(fā)生信號(hào)的內(nèi)部削波。這種剪切也可能導(dǎo)致讀取錯(cuò)誤。
使用步驟 3 中描述的方法減少信號(hào)。
實(shí)例
輸入信號(hào)和降噪
假設(shè)優(yōu)化的輸出電阻值為Ro.
目標(biāo):信號(hào)減少 25%。
使用一個(gè) 0.25 × Ro和一個(gè) 0.75 × Ro串聯(lián)在頭上。然后 0.75 × Ro系在頭部共銷側(cè)。將中點(diǎn)綁定到輸入。
使用四個(gè) 0.25 × Ro串聯(lián)在頭上。將中點(diǎn)綁定到輸入。
目標(biāo):信號(hào)減少 75%。
使用一個(gè) 0.25 × Ro和一個(gè) 0.75 × Ro串聯(lián)在頭上。然后 0.25 × Ro系在頭部共銷側(cè)。將中點(diǎn)綁定到輸入。
使用四個(gè) 0.25 × Ro串聯(lián)在頭上。將中點(diǎn)上方的一個(gè)水龍頭連接到輸入。
阻尼系數(shù)的影響
接下來,我們考慮使用基于MAXQ1740的MCR刷卡時(shí)的各種阻尼因素及其對(duì)實(shí)際信號(hào)行為的影響。MRH 2用于測(cè)試。關(guān)于使用的測(cè)試卡,有兩件重要的事情需要注意。首先,卡可從Q-Card購(gòu)買,并遵循ISO / IEC 7811至7816標(biāo)準(zhǔn)。其次,卡信號(hào)幅度指定為標(biāo)稱電平的百分比。因此,40%的卡意味著最大輸出電平是標(biāo)稱ISO水平的40%。
在我們獲得MRH模型之前,需要費(fèi)時(shí)且令人沮喪的猜測(cè)來確定外部電阻的正確值。使用此處提供的模型,我們通過使用與我們的模型預(yù)測(cè)相匹配的13.5kΩ外部電阻解決了噪聲問題。圖13顯示了過阻尼行為,而圖14顯示了臨界阻尼行為。比較圖11和圖12,我們注意到與臨界阻尼行為相比,過阻尼情況的建立和峰值偏移緩慢。如前所述,緩慢建立和峰值偏移都可能導(dǎo)致時(shí)序誤差,從而導(dǎo)致讀取誤差。
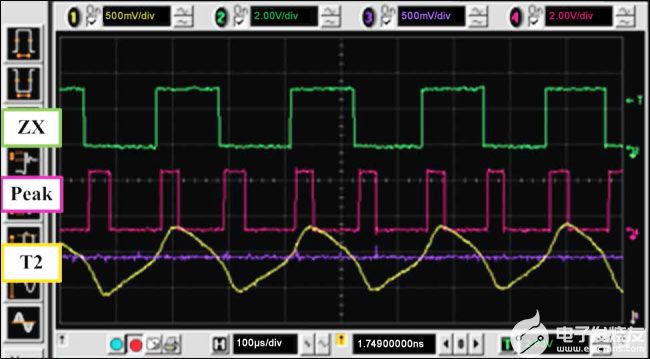
圖 13.過阻尼響應(yīng)。T2 用于使用 40% 卡和 R 手動(dòng)刷卡o= 1.5kΩ。
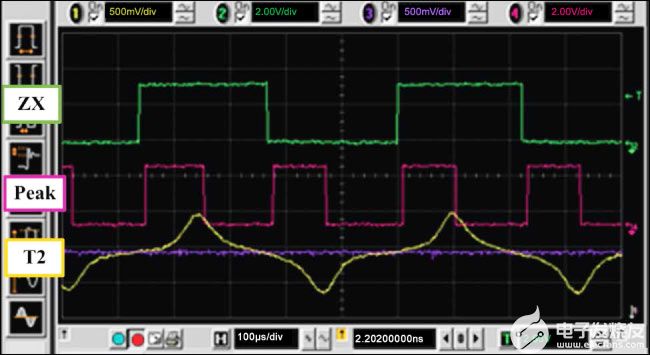
圖 14.臨界阻尼行為。T2 用于使用 40% 卡和 R 手動(dòng)刷卡o= 13.5kΩ。
結(jié)論
當(dāng)然可以使用麥克斯韋場(chǎng)方程、MRH 的幾何形狀和邊界條件來預(yù)測(cè) MRH 輸出電壓行為。然而,這種方法非常復(fù)雜,對(duì)電路分析、設(shè)計(jì)和調(diào)試的見解有限。相反,我們建議首先表征MRH,然后使用基本電路理論和簡(jiǎn)單的電路模擬器來分析MCR行為。
使用本文中介紹的方法,可以在設(shè)計(jì)階段的早期或決定選擇哪種MRH時(shí)預(yù)測(cè)和預(yù)防潛在問題。例如,設(shè)計(jì)人員現(xiàn)在可以預(yù)見,在欠阻尼系統(tǒng)中,由于假峰值和假過零,可能會(huì)發(fā)生讀數(shù)錯(cuò)誤。振鈴和過度增益峰值(在刷卡速度的3次和5次諧波附近)都可能產(chǎn)生假峰值和過零。相反,如果系統(tǒng)嚴(yán)重過阻尼,則由于峰值偏移,可能會(huì)發(fā)生時(shí)序誤差。
此處介紹的方法對(duì)于提高使用特定讀頭的現(xiàn)有讀卡器系統(tǒng)的性能也很有用。例如,在噪聲系統(tǒng)中,可以首先使用多個(gè)串聯(lián)外部電阻使系統(tǒng)嚴(yán)重阻尼,然后從適當(dāng)節(jié)點(diǎn)分接MRH輸出以分壓MRH輸出電平。
最后,在基于MAXQ1740微控制器的實(shí)際讀卡器系統(tǒng)中驗(yàn)證了該方法。
審核編輯:郭婷
-
微控制器
+關(guān)注
關(guān)注
48文章
7490瀏覽量
151057 -
讀卡器
+關(guān)注
關(guān)注
2文章
410瀏覽量
39343
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
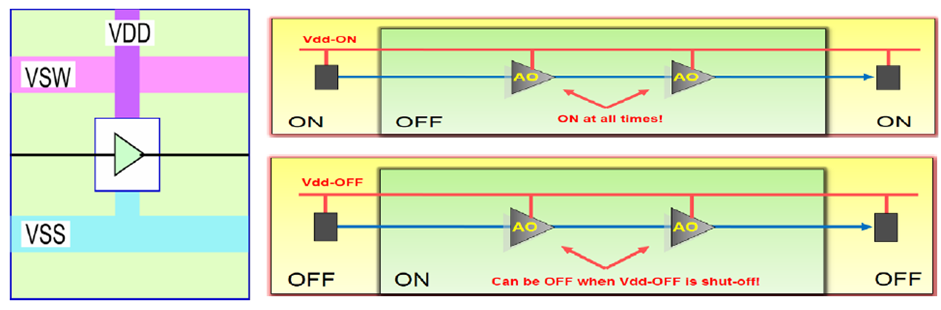
什么是always on buffer?什么情況下需要插always on buffer?
vc707 ddr3接口在某些情況下讀取數(shù)據(jù)與寫入數(shù)據(jù)不匹配
聯(lián)鎖安全房門中磁卡識(shí)別原理圖
基于霍爾傳感器在磁卡信讀取信息的應(yīng)用指南


什么情況下使用示波器
資深廠家揭秘棒形線圈電感什么情況下會(huì)有噪音

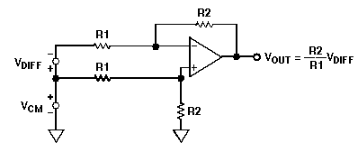
在存在大共模電壓的情況下測(cè)量小差分電壓
什么情況下選用工業(yè)主板

什么情況下需要使用微機(jī)消諧裝置
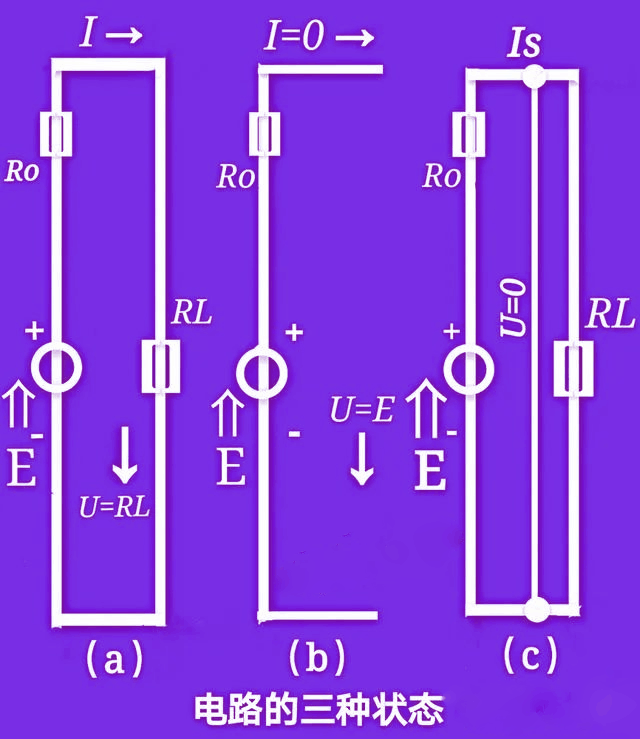
為什么短路情況下電流回上升?
電機(jī)在什么情況下需要選擇圓柱滾子軸承?
為什么電容在低電壓情況下會(huì)發(fā)熱






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論