 3D視覺感知底層技術與產業應用
3D視覺感知底層技術與產業應用
奧比中光是一家專門做3D視覺感知技術的公司。我們為什么要做三維相關的東西?其實還是應用驅動。三維相關的應用變多了,如智能檢測識別、6DoF定位、機器人SLAM等,而原來的2D信息則越來越不夠用。
為什么需要三維感知技術?
實際上,三維感知技術的種類還是蠻多的。今天我想講的,主要還是偏重于非接觸式的三維感知技術。而即使是非接觸式的三維感知,依然有很多分支,有光學的,還有非光學的,像超聲、毫米波等。
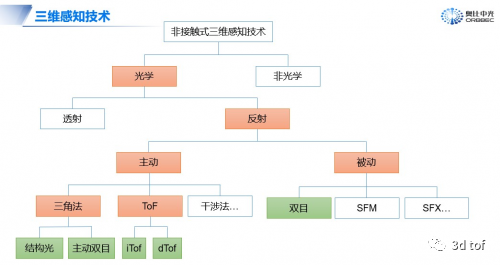
奧比中光關注的還是光學方面。從光學測量系統來看,又分為透射式、反射式。透射式一般測什么?測一些透明材質物體(如玻璃),往往是用透射式的。我們常見的一般是反射式:光在發出之后通過物體表面反射回來,然后被傳感器接收到,利用這個信息來計算深度。
反射式又可以分主動和被動。主動是指它會投射一些特定的光或光斑,從而實現三維恢復。我在圖中列了幾種常見的方法,其實光學測量的范疇很大,還不限于這幾類。被動也很多技術路線。人的眼睛其實就是一個被動雙目,像SFM、SFX、攝影測量等,則是利用Motion、shading等多種約束去解算。
今天,我主要想和大家分享下奧比中光的主動結構光、主動被動雙目及ToF技術。
結構光的前世今生
結構光的歷史其實很早。20年前,研究人員就能用條紋結構光重建出人臉模型,只是計算和建模過程比較緩慢。即使到了現在,結構光的概念還是比較寬泛的。
我想重點介紹的Kinect,大家可能已經比較清楚了。Kinect應該是第一個消費級的Depth-Camera,而且銷量也蠻大,有超過3000萬套。而真正為Kinect提供技術的公司,其實是以色列的PrimeSense。這家2007年成立的公司專注于研發實時結構光技術,并在2009年與微軟一起發布了Kinect,可以和Xbox配合做體感游戲。Kinect深刻影響了企業界和學術界,大家那時發現,1000塊錢左右就能得到一個深度相機,還是很不可思議的。
奧比中光在2013年成立,在2015年就推出了我們第一套結構光傳感器。為了推廣方面的需求,我們做了兼容,盡量與Kinect的數據協議保持一致。實際上,我們的傳感器能輸出的分辨率還可以更高。
PrimeSense后來被蘋果收購。蘋果在2017年9月推出iPhone X,帶著結構光“劉海”,這也是蘋果第一款帶3D相機的手機,可以用來刷臉解鎖、刷臉支付。
在安卓陣營里,奧比中光與OPPO合作,推出了第一款帶3D攝像頭的安卓手機。其實,我們在2017年初就可以把3D結構光方案做進手機,只是廠商當時不理解3D應用的價值,直到iPhone X的發布引爆了行業。
在2018年下半年,我們又在結構光的產業化應用上邁出了一大步,把結構光大規模地用在線下刷臉支付設備中。
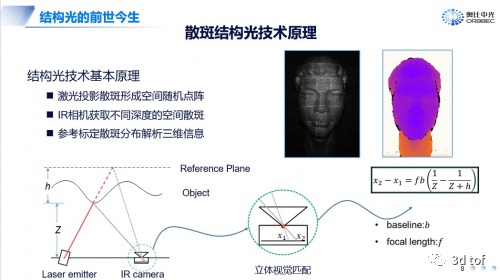
實時結構光的原理其實不難。把激光散斑投射到物體上,形成散斑圖,然后在特定的平面上采集一幀參考圖像。利用這個散斑圖,跟參考圖上的散斑做匹配,找到對應的視差,然后計算它Z方向的信息。
結構光跟雙目有一定接近的地方,不過結構光只有一個相機。如果把結構光相機中的激光投影模塊看成一個倒置的相機,其實就很接近雙目技術。
結構光的核心在于做匹配,計算量很大。即使是算一個像素,一個block,也要算很多次。計算100萬像素的話,數據量就非常巨大。所以,實現這個過程,需要自己做芯片。
到現在為止,奧比中光已經自研了四代結構光芯片。因為結構光計算量大,集成到芯片上,可以把算力、成本、功耗都平衡到可以大規模生產的地步。
主動被動融合的奧比中光雙目技術
再來講講雙目。奧比中光在雙目上做了什么呢?
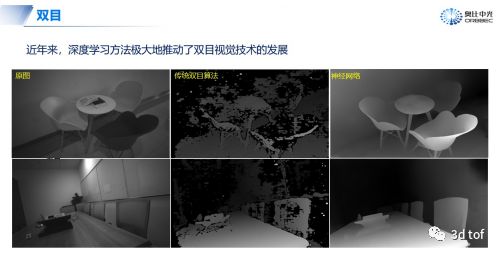
我們做了主動被動融合的雙目模式。在幾米之內的近距離時,采用主動增加散斑紋理,得到更好的精度;在遠距離時,因為主動投射沒有任何意義,就會變成被動雙目。
同學們可能知道,這時候圖像容易出現抖動的情況。怎么辦呢?奧比中光開始采用深度學習的方式,用深度學習模型來學習圖像的特征,然后做特征匹配,效果比傳統方法好很多。
雙目芯片這塊,我們也在做芯片設計。因為雙目的計算量與結構光一樣,都非常巨大。奧比中光原來已有的兩款結構光芯片MX6000和MX6600,其實也兼容雙目。之后,我們還會再專門做一款AIOT芯片,我們叫它Venus,結合了雙目和iToF的處理。
iToF與dToF:自研Sensor是核心壁壘
奧比中光也在投入iToF Sensor,預計今年7月份能夠量產。這個項目從開始到現在已經做了快三年,用的時間還蠻長的。值得一提的是,我們目前正在和微軟一起合作,開發在Azure云計算平臺上使用的iToF相機。

iToF發展簡史
簡單介紹下iToF的原理。iToF的原理是發射脈沖,再接受脈沖,最終利用相位差計算深度。一個不需要高精度的iToF測量其實很簡單,但如果想把一個系統做得很精確,需要大量的標定工作。因為發射的脈沖跟理想的正弦信號還差很多,這塊需要標定。
iToF系統濾波算法
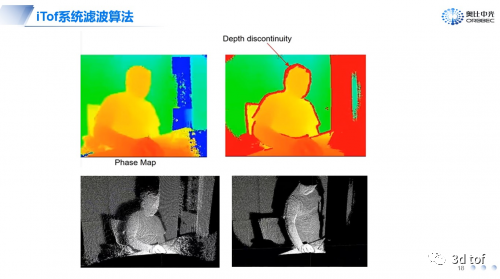
而iToF系統標定這塊,主要有四個方面:
全局偏差標定與補償:全局偏差相當于整個系統的系系統誤差,通過對全局偏差的處理,使測量數據歸一化。
wiggling標定:主要解決調制信號與理想信號存在的周期性差異,因此,在標定時需要確保完成對一個調制周期的標定補償。
FPPN標定:FPPN噪聲是與像素點相關的固定偏置噪聲,因此,可以在某一位置上計算固定偏置的相位。然后在計算深度時加上這一個固定的偏置相位即可。
溫漂標定:溫度會改變深度偏移,因為激光調制和傳感器中的延遲時間解調會隨溫度變化。因此,補償隨溫度變化漂移時,應根據傳感器和激光驅動器中的溫度應用于原始距離。
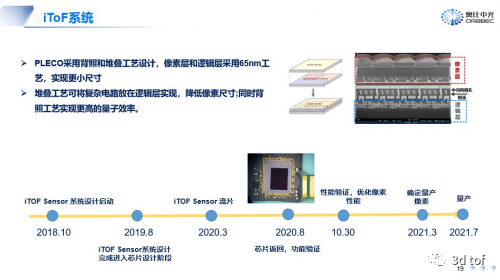
給大家再介紹下奧比中光自研iToF傳感器PLECO。PLECO采用背照和堆疊工藝設計,像素層和邏輯層采用65nm工藝,尺寸做得更小。聽說索尼下一代將采用背照和堆疊工藝來做iToF傳感器,實際上奧比中光在這上面已經做了三年了。
奧比中光iToF開發時間線
講完iToF,再講講dToF。蘋果在iPhone12系列上裝的Lidar其實就是dToF。dToF跟iToF原理上唯一的差別就在于,dToF是測量時間差,發射出去脈沖跟接收的脈沖中間有一個時間差。不過,對這個時間差的測量精度要求非常高。
dToF最關鍵的部件是接收端的Sensor。dToF Sensor的發展也有一個趨勢,最早基本都在用APD (Avalanche Photo Diode),后來發展成SPAD(Single Photon Avalanche Diode),即單光子雪崩二極管,只進去一個光子也會觸發它的雪崩。再后來,則會走向SPAD Array的路線。而dToF技術的核心壁壘,也在于Sensor。
主流3D視覺感知技術,各有千秋
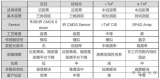
3D視覺感知技術各有特色,我們是全球少數全面布局結構光、雙目、iToF、dToF、激光雷達等主流3D視覺感知技術的公司。我這里并沒有給出哪種技術它的精度到底好還是不好,而是給了一些跟誤差相關的參數。

主流3D視覺感知技術對比
像結構光和雙目,它的誤差聯系最緊密的就是測量距離和焦距,可以看出它的誤差是隨著距離成平方關系的。iToF基本跟距離成線性關系,dToF幾乎就是一個常量,整體精度不隨距離的變化而變化,當然,dToF測量結果跟時間的精度關系很大。
3D視覺感知技術本身沒有“好”與“壞”之分,而是分別適合于不同的應用場景。我認為幾種技術之間,是一種優勢互補、長期并存的狀態。
3D視覺感知技術是趨勢,大規模產業化正當其時
我再分享幾個典型的應用場景。整體來說,結構光的優勢還是近距離感測,雙目的好處就在于它可近可遠。iToF在0.1到5米范圍內,dToF可以到幾百米,車載激光雷達的原理就是dToF。
奧比中光一直在做3D視覺感知技術,把這幾種技術從底層Sensor、芯片設計到光學、算法以及整體系統優化,都做了全方位深耕。我們為什么要這么做?舉個簡單的例子,如果企業核心的Sensor是買來的,那么做很多應用都會被局限住,就容易在一些關鍵領域被卡脖子。

奧比中光做了很多3D視覺感知模組,這些模組可以應用到的場景也很多,如手機前置、后置攝像頭,線下刷臉支付,汽車激光雷達、車內安防,智能門鎖,AR/VR,機器人,智慧畜牧,工業三維檢測等等。
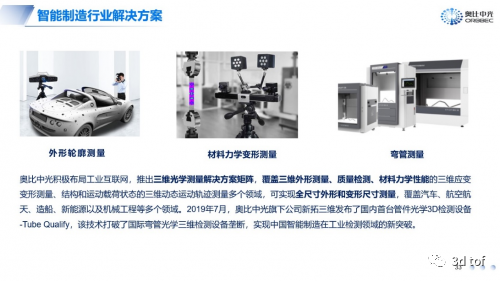
奧比中光智能制造行業解決方案
當前,3D視覺感知技術已經在多個領域崛起,并且在迅速擴大應用規模。與此同時,我們也能看到光學產業已經在向亞洲乃至轉移——從20世紀中葉前歐洲國家(德國為主)獨占鰲頭,到1950年日本光學產業高速起飛而后制霸全球,從21世紀初期臺灣光學產業在智能手機鏡頭帶動下崛起,到近年來大陸光學產業科創新秀涌現、大規模應用落地,中國有望在3D感知技術產業實現彎道超車。
我們捕捉到了3D視覺感知技術在物聯網時代的應用浪潮,并大力發展底層核心技術和下游應用生態。
我希望,中國能夠在高端基礎組件(比如Sensor、算法芯片、硅光技術等)上,有自己的持續研發和生產能力,培養更多人才,不被“卡脖子”
審核編輯 :李倩
-
感知
+關注
關注
1文章
64瀏覽量
12078 -
結構光
+關注
關注
0文章
74瀏覽量
13180 -
3D視覺
+關注
關注
4文章
423瀏覽量
27428
原文標題:3D視覺感知底層技術與產業應用
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
技術基因+自主創新,光鑒科技塑造3D視覺感知新范式

3d成像融合傳感技術:3D機器視覺引爆市場
一個小小的3D傳感器,憑什么能夠摘得“人工智能領域皇冠上的明珠”?
3DV | 首屆中國三維視覺大會上,奧比中光揭示3D視覺感知底層技術布局與產業化邏輯
奧比中光全系3D視覺感知產品亮相光博會,機器視覺“未來已來”
【虹科】3D機器視覺技術您了解多少?






 工商網監
工商網監
評論