 自動駕駛仿真平臺
自動駕駛仿真平臺
作者 |樓澤如 上海控安可信軟件創新研究院研發工程師
來源 |鑒源實驗室
01引 言
自動駕駛汽車的興起,正在重新定義汽車行業。隨著自動駕駛技術的發展,自動駕駛汽車將會大大提升交通安全、減少事故發生、減少交通擁堵、提高公路容量等等,為人類帶來前所未有的便利。然而,由于自動駕駛汽車需要面對復雜的交通環境和意外事件,使得自動駕駛汽車的開發和測試頗具挑戰性。
傳統的自動駕駛測試方法包括在實際道路上進行封閉場地和公共道路測試,但這些方法都存在很大的安全風險和高成本。因此,自動駕駛仿真測試逐漸成為了自動駕駛汽車開發過程中必不可少的一部分,對于提高自動駕駛汽車的安全性、可靠性、精度和性能等方面都有著重要的意義。仿真測試不僅可以在更加安全、低成本的環境下進行測試,而且可以提供更多的測試數據和測試情況,加速自動駕駛汽車的開發和實際應用。
02自動駕駛仿真測試的重要性
自動駕駛仿真測試是一種通過仿真技術來模擬測試自動駕駛汽車的功能和性能的方法,以評估自動駕駛汽車的可靠性、安全性和適應性等,便于優化自動駕駛汽車的功能、性能和行駛體驗。
自動駕駛仿真測試憑借其測試場景豐富、計算速度快、測試效率高、資源消耗低、可重復性好、可嵌入汽車開發的各個環節等原因,能夠很好地在實際路面行駛之前,對車輛進行全面、安全的測試。這種測試方法可以提高自動駕駛系統的安全性和可靠性,并減少實際測試的風險和成本,加速自動駕駛技術的發展和應用。仿真測試在自動駕駛技術開發中具有以下幾個重要性和必要性:
(1)安全性保障:自動駕駛汽車具有高度的復雜性和安全性要求,直接進行實地測試會存在很高的風險。仿真測試可以在虛擬環境中模擬各種復雜的路況和交通情況,對自動駕駛汽車的各項功能進行測試,從而發現潛在的安全隱患,保障自動駕駛汽車的安全性。
(2)成本效益:自動駕駛汽車的研發需要大量的測試,如果全部在實際道路上進行測試,將會耗費大量的時間和金錢。仿真測試可以在虛擬環境中快速、精準地模擬各種場景和情況,有效地降低測試成本,縮短研發周期,提高測試效率。
(3)多樣化的測試場景:仿真測試可以模擬各種復雜的路況、天氣狀況、道路建設和交通情況等,進行多種不同情況下的測試,以確保自動駕駛汽車的安全性和可靠性。
(4)提高測試覆蓋率:仿真測試可以模擬大量測試場景,提高測試的覆蓋率和深度,從而更好地發現和解決潛在的問題。
(5)系統性的測試:自動駕駛汽車涉及到多個系統的協同作用,仿真測試可以對整個系統進行系統性的測試,確保系統各個部分的配合協調性。
03自動駕駛仿真測試的類型
自動駕駛仿真測試作為一種高效、安全、低成本的測試方法,會針對自動駕駛系統的功能和性能、安全性、可靠性等,進行全面、充分的測試,以保證自動駕駛汽車能夠達到路面行駛的要求。自動駕駛汽車的功能測試是測試自動駕駛汽車是否能夠按照預期執行各種功能,例如遵守交通規則、感知道路標志和障礙物等。Huang等[3]將功能測試分為:
(1)感知層功能測試:感知測試主要用于測試自動駕駛汽車的感知能力,包括車道線和道路標志的檢測、障礙物識別和檢測、行人檢測和識別等。感知測試的目的是檢查自動駕駛汽車的感知系統在不同的情況下的準確性和穩定性。
(2)決策層功能測試:決策測試主要用于測試自動駕駛汽車的決策能力,包括行駛路徑規劃、車輛間的跟車和超車等情況。決策測試的目的是檢查自動駕駛汽車的決策系統在不同的情況下的正確性和合理性。
(3)控制層功能測試:控制測試主要用于測試自動駕駛汽車的控制能力,包括加速、制動、轉向等控制。控制測試的目的是檢查自動駕駛汽車的控制系統在不同情況下的穩定性和精度。
除了功能測試以外,還有一些其他的測試類型也被廣泛應用于自動駕駛仿真測試中,比如安全測試、性能測試等。安全測試主要用于測試自動駕駛汽車在緊急情況下的反應能力和安全性。安全測試的目的是檢查自動駕駛汽車的安全性,例如急剎車或避讓等威脅場景中自動駕駛汽車是否能安全應對。而性能測試主要用于測試自動駕駛汽車的性能表現,例如加速、最高速度、燃油效率等。性能測試的目的是檢查自動駕駛汽車的性能表現是否符合設計要求。
需要注意的是,自動駕駛汽車的測試不僅僅是仿真測試,還需要在實際路況下進行測試。實際測試可以驗證仿真測試的結果,同時也可以發現一些仿真測試無法模擬的特殊情況。因此,自動駕駛汽車的測試需要結合仿真測試和實際測試,以保證測試結果的準確性和可靠性。
04自動駕駛仿真測試的方式
汽車的V字開發流程是一種經典的產品開發流程,它將整個產品開發過程劃分為左側的需求分析、設計、開發等階段,以及右側的系統測試、集成測試等階段,形成一個“V”字形狀,因此被稱為“V字開發流程”。
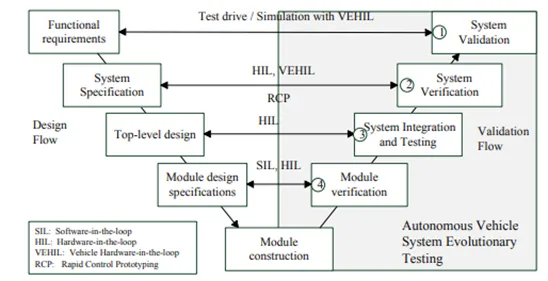
圖1 汽車的V字開發流程[3]
針對自動駕駛的仿真測試同樣也必須滿足汽車的 V 字開發流程,具備覆蓋 SIL(軟件在環)、HIL(硬件在環)、VIL(車輛在環)全流程驗證的能力。
(1)軟件在環測試(Software-in-the-Loop,SIL)
軟件在環測試是在開發的早期,將被測試的軟件系統結合到仿真環境中進行測試。在SIL測試中,采用仿真環境來執行軟件,而不是將軟件實際加載到目標硬件中執行。在SIL測試中,可以對軟件的算法和邏輯進行測試和驗證,以檢查其是否符合規格和設計要求。SIL測試可以在早期發現軟件問題,這樣可以更快地糾正錯誤,降低軟件開發成本,并加快產品上市時間。
(2)硬件在環測試(Hardware-in-the-Loop,HIL)
硬件在環測試是指將真實的汽車硬件設備與模擬的系統環境相結合,通過模擬各種實際的駕駛場景和條件,對硬件進行測試和驗證。在 HIL 測試中,真實的硬件設備(如控制器、傳感器、執行器等)被連接到模擬的虛擬系統環境中。整個虛擬的系統環境向硬件設備發送模擬信號,從而模擬出真實的自動駕駛場景。例如,在對ECU進行測試時,ECU會接收到仿真環境發出的各種信號和數據,車速、轉速、油門踏板信號、剎車信號等。通過這些信號和數據,ECU可以模擬不同的駕駛場景,例如加速、制動、轉彎、變道等。
(3)車輛在環測試(Vehicle-in-the-Loop,VIL)
車輛在環測試是指將實際車輛放置在測試環境中進行測試的方法。在VIL測試中,車輛被連接到仿真系統,仿真系統提供了場景和其他車輛的虛擬信息,通過控制車輛的行為,進行測試和驗證。汽車通過實際的控制系統與仿真環境進行交互,例如汽車的傳感器(如雷達、攝像頭)可以接收來自仿真環境的虛擬信息,汽車的控制系統也可以將車輛的實際狀態(如速度、轉向、制動)反饋給仿真環境。
05小 結
在未來的自動駕駛汽車研發中,自動駕駛仿真測試將繼續發揮重要的作用,在保證安全的前提下,大幅降低測試成本,并且覆蓋更廣泛的測試場景。同時,自動駕駛仿真測試也需要不斷發展和改進,加強模擬環境的復雜性,提高數據的準確性和可靠性,提升模擬場景與真實場景的一致性,從而更好地滿足自動駕駛汽車的測試需求,促進自動駕駛技術的發展。
參考文獻:
[1]中國電動汽車百人會. 中國自動駕駛仿真藍皮書 [R]. (2020) .
[2]朱冰,張培興,趙健,陳虹,徐志剛,趙祥模,鄧偉文.基于場景的自動駕駛汽車虛擬測試研究進展[J].中國公路學報,2019,32(06):1-19.DOI:10.19721/j.cnki.1001-7372.2019.06.001.
[3]Huang W L, Wang K, Lv Y, et al. Autonomous vehicles testing methods review[C]//2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC). IEEE, 2016: 163-168.
[4]Sch?ner H P. Simulation in development and testing of autonomous vehicles[C]//18. Internationales Stuttgarter Symposium: Automobil-und Motorentechnik. Springer Fachmedien Wiesbaden, 2018: 1083-1095.
[5]Rosique F, Navarro P J, Fernández C, et al. A systematic review of perception system and simulators for autonomous vehicles research[J]. Sensors, 2019, 19(3): 648.
審核編輯黃宇
-
仿真測試
+關注
關注
0文章
75瀏覽量
11289 -
自動駕駛
+關注
關注
783文章
13694瀏覽量
166166 -
汽車
+關注
關注
13文章
3433瀏覽量
37180
發布評論請先 登錄
相關推薦
自動駕駛的到來
硅谷組建團隊、L3產品落地,想法多多的騰訊自動駕駛

自動駕駛仿真平臺的研究論文詳細資料概述
自動駕駛仿真平臺VISTA推出,大幅優化自動駕駛汽車測試和部署時間
國外仿真巨頭致力打造閉環仿真平臺,構建行業壁壘

51WORLD自動駕駛仿真平臺已與多款國產操作系統成兼容認證
是德科技推出自動駕駛仿真平臺驗證ADAS技術
51WORLD為上汽檢打造的“車聯網C-V2X通信性能測試系統”
自動駕駛仿真平臺的關鍵構成及技術趨勢分析
自動駕駛仿真工具

自動駕駛仿真平臺概述






 工商網監
工商網監
評論