 MATLAB學習筆記之PID算法3
MATLAB學習筆記之PID算法3
2.7 變積分PID算法
2.7.1 實現原理
變積分PID可以看做是積分分離的PID算法的更一般形式,在普通的PID控制算法中,由于積分系數是常數,所以在整個控制過程中,積分增量是不變的,但是,系統對于積分項的要求是,系統偏差較大時,積分作用應該減弱甚至全無,而在偏差較小時,則應該加強,積分系數取大了會引起超調,甚至積分飽和,取小了又不能短時間內消除靜差,因此,需要根據系統偏差的大小改變積分速度。
變積分PID的基本思想是改變積分項的累加速度,使其與偏差大小相對應,偏差越大,積分越慢,偏差較小,積分越快。
這里給積分系數前加一個比例系數index,使最終的比例環節的積分系數為Ki*index。
2.7.1 MATLAB算法
clc
clear
%PID初始化
len = 200 ; %運算次數
y = zeros(1,len); %期望值
y_d = zeros(1,len); %過程值
err = zeros(1,len); %誤差值
err_0 = 0 ; %k時刻誤差
err_1 = 0 ; %k-1時刻誤差
y_d_last = 0 ; %k-1時刻輸出
integral = 0; %積分值
Kp = 0.4; %比例系數
Kd = 0.2; %微分值
Ki = 0.2 ; %積分值
max = 400 ; %積分上限
min = -200 ; %積分下限
index = 0 ; %積分有效性
%運算過程
for k=1:1:len
y(k) = 200 ; %期望輸出
err_0 = y(k)-y_d_last; %計算偏差
if abs(err_0) > max
index = 0 ;
elseif abs(err_0) < min
index = 1 ;
integral = integral+err_0; %誤差累計
else
index = ( max-abs(err_0) )/20 ;
integral = integral+err_0; %誤差累計
end
y_d_last = Kp*err_0 + Ki*index*integral/2 + Kd*(err_1-err_0); %PID運算公式
err_1 = err_0 ;
%更新參數
y_d(k) = y_d_last ;
err(k) = err_1 ;
end
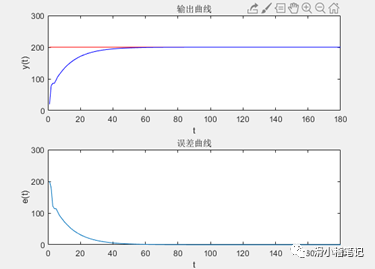
%輸出圖像繪制
t = 1:1:len;
subplot( 2, 1, 1 ) ;
plot( t, y, 'r', t, y_d, 'b' );
axis([0 len, 0 1.5*y(1)])
title('輸出曲線');
xlabel('t')
ylabel('y(t)')
%誤差圖像繪制
subplot( 2, 1, 2 ) ;
plot( t, err );
axis([0 len, 0 1.5*y(1)])
title('誤差曲線');
xlabel('t')
ylabel('e(t)')
2.7.2 C算法
#include
#include
struct _pid
{
float SetSpeed ; //設置速度
float ActualSpeed ; //實際速度
float err ; //誤差
float err_last ; //最終誤差
float Kp , Kd , Ki ; //比例系數
float voltage ; //輸出電壓
float integral ; //積分值
}pid;
void PID_Init()
{
pid.SetSpeed = 0 ;
pid.ActualSpeed = 0.0 ;
pid.err = 0.0 ;
pid.err_last = 0.0 ;
pid.voltage = 0.0 ;
pid.integral = 0.0 ;
pid.Kp = 0.4 ;
pid.Kd = 0.2 ;
pid.Ki = 0.2 ;
}
float PID_Realize( float Speed )
{
char index ;
pid.SetSpeed = Speed ;
pid.err = pid.SetSpeed-pid.ActualSpeed ;
if( abs(pid.err)>200 )
index = 0 ;
else if( abs(pid.err)<180 )
{
index = 1 ;
pid.integral += pid.err ;
}
else
{
index = ( 200-abs(pid.err) )/20 ;
pid.integral += pid.err ;
}
pid.voltage = pid.Kp*pid.err+index*pid.Ki*pid.integral/2+pid.Kd*( pid.err-pid.err_last ) ;
pid.err_last = pid.err ;
pid.ActualSpeed = pid.voltage*1.0 ;
return pid.ActualSpeed ;
}
void main()
{
int count ;
count = 0 ;
PID_Init() ;
while( count<150 )
{
float Speed = PID_Realize( 200.0 ) ;
count ++ ;
printf( "%.2f\\n" , Speed ) ;
}
}
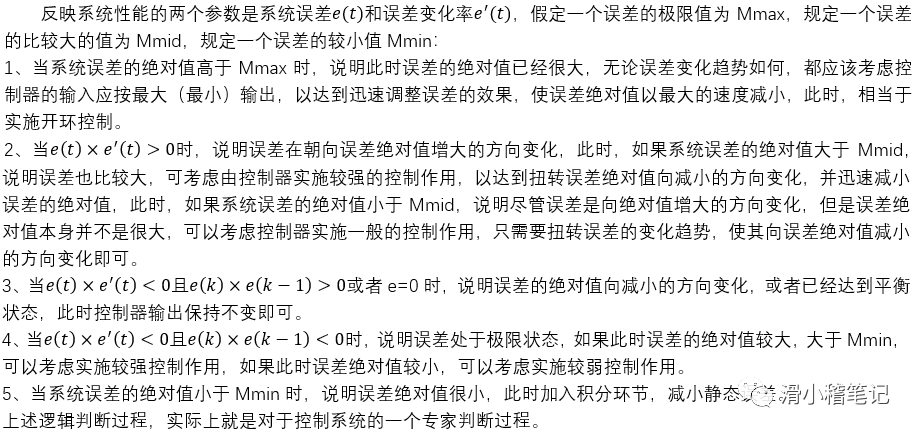
2.8 專家PID與模糊PID算法思想
PID的控制思想非常簡單,主要就是比例,積分和微分環節的參數整定過程,對于執行期控制模型確定或者控制模型簡單的系統來說,參數的整定可以通過計算獲得,對于一般精度要求不是很高的執行器系統,可以采用拼湊的方法進行實驗型的整定。
但是,實際的系統大部分屬于非線性系統,或者說是系統模型不確定的系統,如果控制精度要求較高的話,那么對于參數的整定過程也是有難度的,專家PID和模糊PID就是為了滿足這方面的需求而設計的,專家算法和模糊算法都歸屬于智能算法的范疇,智能算法最大的優點就是在控制模型未知的情況下,可以對模型進行控制,這里需要注意的是,專家PID也好,模糊PID也好,絕對不是專家系統或模糊算大與PID控制算法的簡單加和,它是專家系統或者模糊算法在PID控制器參數整定上的應用,也就是說,智能算法是輔助PID進行參數整定的手段。
關于專家PID的C語言實現,需要找到一些依據,還需要從PID系數本身考慮。
1、比例系數Kp的作用是加快系統的響應速度,提高系統的調節精度,Kp越大,系統的響應速度越快,調節的精度越高,但是容易產生超調,甚至會引起系統不穩定,Kp取值過小,則會降低系統的調節精度,拖慢響應速度,從而延長調節時間,使系統的靜態,動態特性變差。
2、積分系數Ki的作用是消除系統的穩態誤差,Ki越大,系統的靜態誤差消除得越快,但是若Ki過大,在響應過程的初期就會產生積分飽和的現象,從而引起相應過程的較大超調,若Ki過小,將使系統靜態誤差難以消除,影像系統的調節精度。
3、微分系數Kd的作用是改善系統的動態特性,其作用主要是在響應過程中抑制偏差向任何方向的變化,對偏差變化進行提前預報,但是若Kd過大,會使響應過程提前制動,從而延長調節時間,而且會降低系統的抗干擾性。
2.9 PID算法應用——電機轉速控制
PID是一種廣泛應用在控制理論中的算法,以直流電機為例,要想精確控制電機的轉速就需要形成一種閉環控制思想。首先將一個默認的輸入端的電壓值發送給直流電機,通過轉速傳感器將當前電機的轉速反饋到輸入端,通過與輸入端做運算,如果轉速高于設定的值,則減小輸入端電壓,如果轉速低于設定的值,則提高輸入端電壓,由此形成了一種閉環控制回路,即通過不停的對輸出端進行反饋,以達到精確控制的目的。為了使控制系統的速度更快,精確性更高,穩定性更強,PID控制器被廣泛應用在了這里面,現在我們通過MATLAB的Simulink來實現直流電機的PID控制。
一個直流電機的模型如上圖所示,為了簡化討論,假設轉子和轉軸都是剛體,且轉子受到的磁場恒定,轉子收到的摩擦力與速度成正比,該電機的物理參數為:
(1)轉子的轉動慣量J=0.01kg·m^2^
(2)電機摩擦系數b=0.01N···m·s
(3)電動勢常數Ke=0.01V/rad/sec
(4)電機扭矩常數Kt=0.01N·m/Amp
(5)電阻R=1Ω
(6)電感L=0.5H
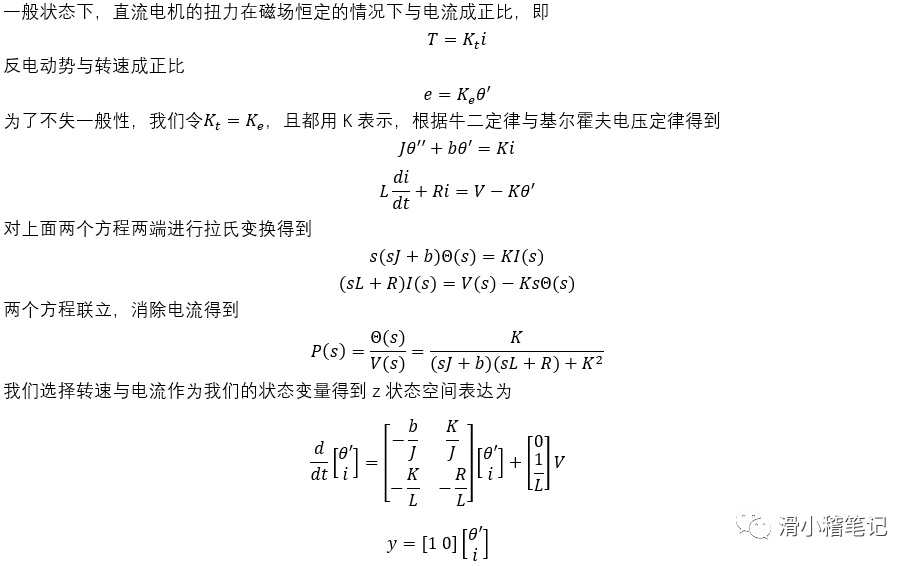
我們希望控制器輸入1V電壓的時候穩定狀態下保持0.1rad/sec的轉速,穩定時間2s,穩態誤差低于1%,受到階躍輸入干擾的時候超調小于5%。Matlab的仿真并不像之前學習51的時候用的Protuse一樣,可以看到直觀效果,Matlab的仿真實際是對數學的計算過程,即輸入與輸出必須都抽象成函數表達式進行,通過觀察輸出的函數表達式與波形來判斷系統的工作狀態與性能。我們將上面得到的復頻域下的函數表達式代入參數,得到

通過Simulink創建仿真圖如下圖所示。

雙擊PID控制器的圖標,打開了以下對話框。
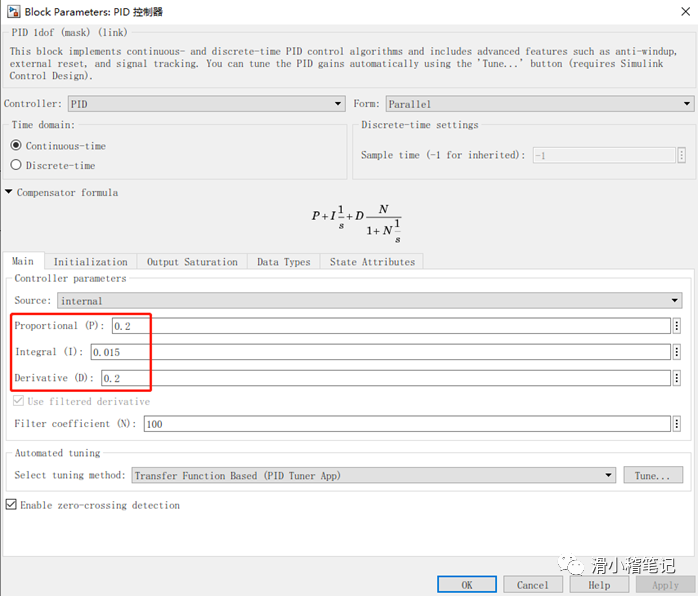
對話框內的這三個參數就是PID控制器的三個參數,其中Proportional代表比例環節,Integral代表積分環節,Derivative代表微分環節,通過修改這三個參數達到實現控制系統的目的。
在PID控制中,這三個參數分別對系統控制有以下幾個作用:
(1)比例環節P:控制輸出響應的速度,減小穩態誤差,但是會增大超調量
(2)積分環節I:消除系統的穩態誤差,加快達到穩定所需的時間,但也會增大超調量
(3)微分環節D:加快動態過程,容易引起系統震蕩,同樣,微分環節也會增大超調量
為了滿足:
(1)穩定時間2s
(2)穩態誤差低于1%
(3)超調小于5%
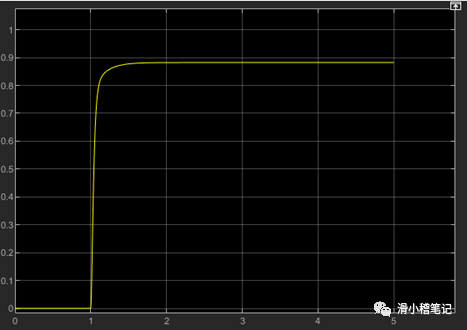
這三個條件,我們首先修改比例環節,用來滿足穩態誤差低于1%這個參數。通過實驗發現,當比例環節設定在100以上的時候,穩態誤差低于1%,如下圖所示。
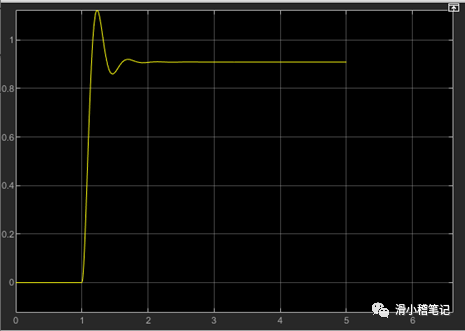
但是我們發現

即系統的超調量較大,達到了20%,此時需要調節微分環節達到目的,我們通過實驗發現,當微分環節超過10時,系統的超調如下圖所示。
此時系統已經不存在超調,現在只需要解決穩定時間小于2s這個參數即可,我們通過設置積分環節達到這個目的,通過實驗發現,當系統的積分環節大于200時,穩定時間小于2s。
-
matlab
+關注
關注
182文章
2963瀏覽量
230195 -
直流電機
+關注
關注
36文章
1708瀏覽量
70088 -
PID
+關注
關注
35文章
1471瀏覽量
85307
發布評論請先 登錄
相關推薦
基于遺傳算法的PID 控制及其MATLAB 仿真

MATLAB學習筆記之PID算法2





 工商網監
工商網監
評論