 控制激光驅動器的方法:POT和DAC
控制激光驅動器的方法:POT和DAC
激光模塊設計人員可以使用固定電阻器、機械電位器、數字電位器或數模轉換器 (DAC) 來控制激光驅動器的調制和偏置電流。可編程方法(POT或DAC)的優點是制造過程可以自動化,并且可以應用數字控制(例如,補償溫度)。使用 POT 可能是一種比 DAC 更簡單的方法。使用POT可能會有輕微的成本優勢,但相對于設計的其他部分,這通常并不重要。使用DAC具有諸多優勢,包括改善線性度(轉化為軟件實現的便利性和達到所需精度的能力)、更高的電路板密度、更寬的分辨率范圍、更好的優化范圍、負電壓激光驅動器的易用性以及單元間的一致性。
本應用筆記討論了在這些應用中使用這些器件的優勢,并概述了激光驅動器中的偏置電路要求。
來自不同供應商的多個激光驅動器系列設計為使用電阻來控制激光驅動器提供的調制和偏置電流。電位計和數模轉換器(DAC)也可用于控制這些參數。對于每種控制方法,都有影響激光驅動器整體性能的好處和權衡。要充分了解激光驅動器控制系統選擇的優缺點,必須熟悉激光驅動器和光纖模塊設計。
最初,電阻用于控制調制和偏置電流,如許多激光驅動器數據手冊所示。雖然電阻是最便宜的元件選擇,但不允許實時調整,在系統校準制造步驟中調整它們既困難又耗時。更好的解決方案是使用機械電位計(可變電阻器),它允許手動調整。
隨著體積的增加和自動化變得越來越重要,機械電位計可以被數字電位計取代。數字電位計還提供有源數字控制。
有源數字控制是一種監控參數(如輸出功率)的技術,方法是用ADC測量參數,用數字引擎處理參數,然后利用這些信息調整參數(如激光驅動器輸出電流)。有源數字引擎可以補償激光二極管的溫度依賴性。
DAC可用于電位計可以使用的大多數地方,并且在某些設計中具有多種優勢。
激光驅動器的控制部分
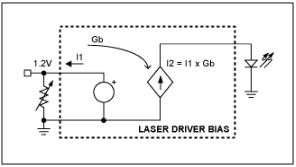
許多激光驅動器具有非常簡單的結構,可以轉換編程電阻(R程序)的輸出偏置和調制深度電流(見圖1)。通常,激光驅動器電流控制引腳后面的內部電路(即I國防部我偏見) 包括一個內部基準電壓源。該內部電壓源的輸出電流被測量,并通過電流放大器放大,電流放大器的輸出是激光驅動器的輸出。連接在地和這些控制引腳之間的簡單電阻器可為該電路提供一致的控制電流。請注意,激光驅動器只關心從該引腳拉出的電流量,而不關心連接到它的電阻器的值。因此,電阻可以替換為控制該電流的DAC,如下文所述。通常,電流放大器的增益約為100-200 (mA/mA),典型輸出電流高達50-80mA。
圖1.用于檢測編程電阻值的激光驅動器內部架構。
數字電位器選項(和優勢)
使用數字電位器代替控制電阻是最簡單、最明顯的方法(見圖2)。
圖2.使用數字電位計對激光驅動器進行編程。
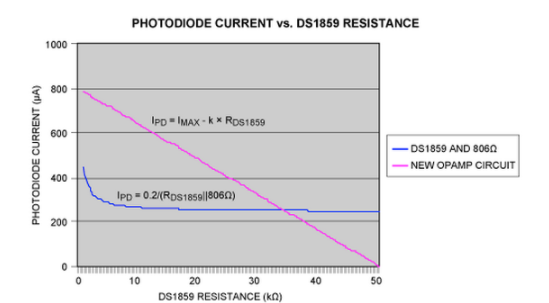
但是,可用電位器的電阻值可能與所需的編程電流范圍不精確一致。可以使用額外的電阻更直接地將電位器的范圍映射到所需的電流范圍(見圖3)。請注意,電流隨電阻的倒數而變化。數字電位計通常具有均勻間隔的步進,這意味著編程電流的最終步長在電位器的低電阻范圍內會很大,而在高電阻范圍內會很小。
圖3.使用優化的編程范圍電位計對激光驅動器電流進行編程。
DAC 選項(和優勢)
可以使用DAC代替電位器來控制激光驅動器電流。電壓輸出DAC與串聯電阻一起使用,使得從激光驅動器控制引腳汲取的電流是編程電流(見圖4)。DAC的理想滿量程/基準電壓與特定激光驅動器內部的基準電壓相同。它可以更大,但DAC的可用范圍受到影響
圖4.使用 DAC 對激光驅動器電流進行編程。
設計工程師考慮使用DAC的一些原因包括:
線性度:數字代碼與電位器產生的控制電流之間的關系為1/R關系。這是 DAC 的線性關系。線性設計有兩個主要優點:
1. DAC線性設計具有非常規則且可預測的步長,因此很容易計算設計是否可以校準到適當的最終目標精度。如上所述,由于1/R關系,電位器設計可能會出現不希望的步長問題,因此設計可能無法達到最終精度。
2. 使用線性控制環路軟件算法,用于基于測量模塊輸出功率來調節輸出電流的控制算法可以簡化設計和優化吞吐量。
密度/電路板尺寸:在某些設計中,DAC實際上可以使電路板布局更小。由于通常還有其他控制參數需要在電路板上使用DAC,因此可以選擇具有2個額外通道的DAC(用于激光驅動器調制深度和偏置電流控制電流)。因此,該功能可以通過設計的另一部分已經需要的另一個IC來實現,而不是為此目的添加新的IC。
分辨率:分辨率大于8位的電位器通常不可用。DAC具有廣泛的分辨率。
范圍優化:DAC的滿量程電壓范圍可以直接對應于電阻選擇所需的電流范圍。如果激光驅動器可用的編程范圍需要改變,使用DAC方法,只需更換電阻器即可;使用POT方法時,可能需要將POT更改為不同的POT,因為電阻值嵌入在POT中。
雙極性易于實現:如果激光驅動器必須采用-5V電壓軌運行,則可供選擇的電位器更少。使用雙極性DAC或類似的電壓轉換技術可以實現替代方案。
單元間一致性:大多數數字電位器的電阻值誤差較大(30%或更多)。DAC和電阻器的誤差可能明顯低于1%,具體取決于所使用的基準電壓源和電阻器。該誤差在校準過程中被修剪掉。但是,在校準算法的誤差預算/校準范圍內需要考慮誤差。此外,如果需要了解所需電壓的分布以了解校準過程的控制,如果控制更一致,則數據會更好。
結論
激光模塊設計人員可以使用固定電阻器、機械電位器、數字電位器或DAC來控制激光驅動器的調制和偏置電流。
可編程方法(POT或DAC)的優點是制造過程可以自動化,并且可以應用數字控制(例如補償溫度)。
使用 POT 可能是一種比 DAC 更簡單的方法。使用POT可能會有輕微的成本優勢,但相對于設計的其他部分,這通常并不重要。
使用DAC具有諸多優勢,包括改善線性度(轉化為軟件實現的便利性和達到所需精度的能力)、更高的電路板密度、更寬的分辨率范圍、更好的優化范圍、負電壓激光驅動器的易用性以及單元間的一致性。
審核編輯:郭婷
-
驅動器
+關注
關注
51文章
7997瀏覽量
144997 -
電阻器
+關注
關注
19文章
3689瀏覽量
61801 -
dac
+關注
關注
43文章
2225瀏覽量
190431
發布評論請先 登錄
相關推薦
適用于激光驅動器供電的數字電阻器
ATLS1A202D恒流激光驅動器
高壓恒流激光驅動器控制效果好
1.25Gbps激光驅動器的研究
MAX3740激光驅動器的精確功率控制
如何與MAX3735或MAX3741緊湊型激光驅動器連接
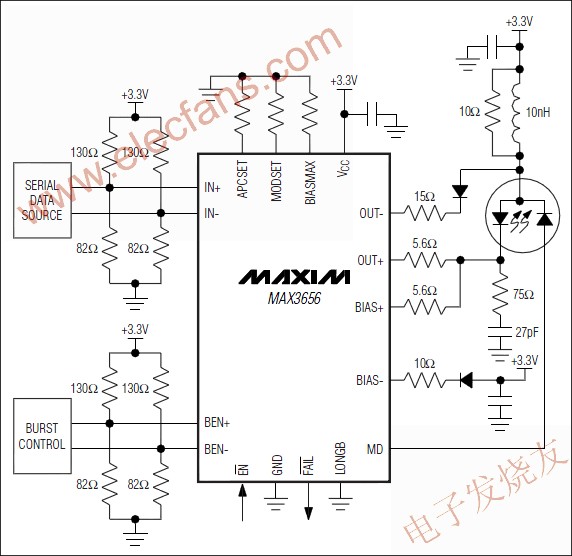
MAX3656突發模式激光驅動器
應用筆記-校準激光驅動器POT和DAC

如何設計帶有GaN ToF激光驅動器的LiDAR系統
如何與MAX3736緊湊型激光驅動器接口
如何連接DS1862與內置APC環路的激光驅動器





 工商網監
工商網監
評論