 MATLAB學習筆記之模糊算法1
MATLAB學習筆記之模糊算法1
概述
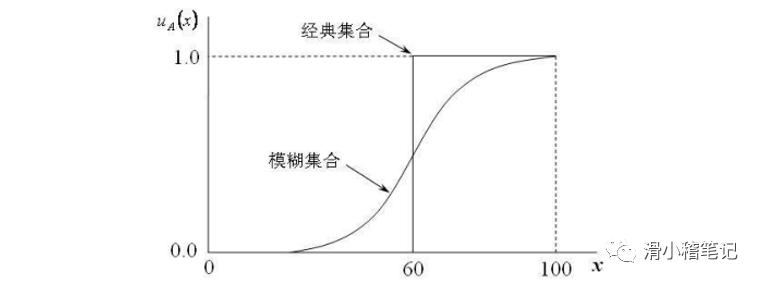
所謂模糊控制,就是對難以用已有規律描述的復雜系統,采用自然語言(如大,中,小)加以描述,借助定性的,不精確的以及模糊的條件語句來表達,模糊控制是一種基于語言的智能控制。
傳統的自動控制器的綜合設計都要建立在被控對象準確的數學模型(即傳遞函數模型或狀態空間模型)的基礎上,但是實際上,很多系統的影響因素很多,通常找出精確的數學模型,這種情況下,模糊控制的誕生就顯得意義重大,因為模糊控制不需要建立數學模型,不需要預先知道過程精確的數學模型。模糊控制與傳統的PID控制,具有如下優點:
(1)無需知道被控對象的數學模型
(2)反映人類智慧思維的智能控制
(3)易被人們所接受,是一種語言變量控制器
(4)構造容易,從屬于智能控制的范疇,尤其適用于非線性,時變,滯后系統的控制
(5)抗干擾能力強,響應速度快,并對系統參數的變化有較強的魯棒性
1.1.1 工作原理
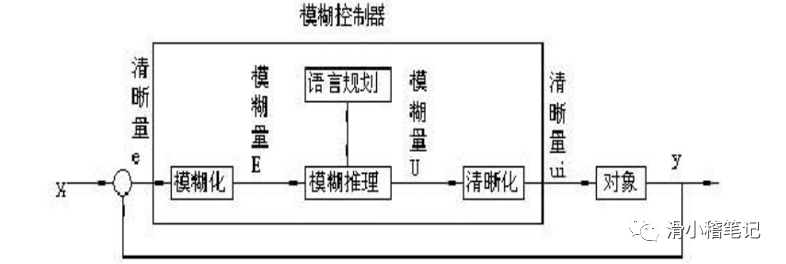
把各種傳感器測出的精確量轉換為適用于模糊運算的模糊量,然后將這些量在模糊控制器中加以運算,最后再將運算結果中的模糊量轉換為精確量,以便對各執行器進行具體的操作控制,這就說明在模糊控制中,存在著一個模糊量與精確量之間相互轉化的問題,如下圖所示:
模糊控制原理圖如下圖所示:
1.1.2 模糊語言集
模糊語言集用表示,一般有={負大,負中,負小,零,正小,正中,正大},用模糊語言變量E來描述偏差,或者用符號表示:
負大:Negative Big,簡稱NB
負中:Negative Medium,簡稱NM
負小:Negative Small,簡稱NS
零:Zero,簡稱ZE
正小:Positive Small,簡稱PS
正中:Positive Medium,簡稱PM
正大:Positive Big,簡稱PB

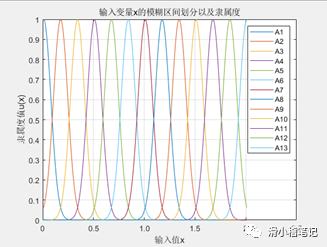
1.1.3 隸屬函數
各參數相對應子集的隸屬函數分別由不同的函數族決定,參數的相應子集指該參數被人為地劃分成的等級所構成的一組模糊集合,相應子集的多少,由控制精度決定,例如,參數“溫差”的相應子集可以是“正大,正中,負小,負大”,也可以是“正大,正中,正小,負小,負中,負大”,后者比前者模糊子集多,所以控制精度更高(在其他相同條件的情況下)。
常用的隸屬函數如下所示。
(1)z型隸屬度函數zmf
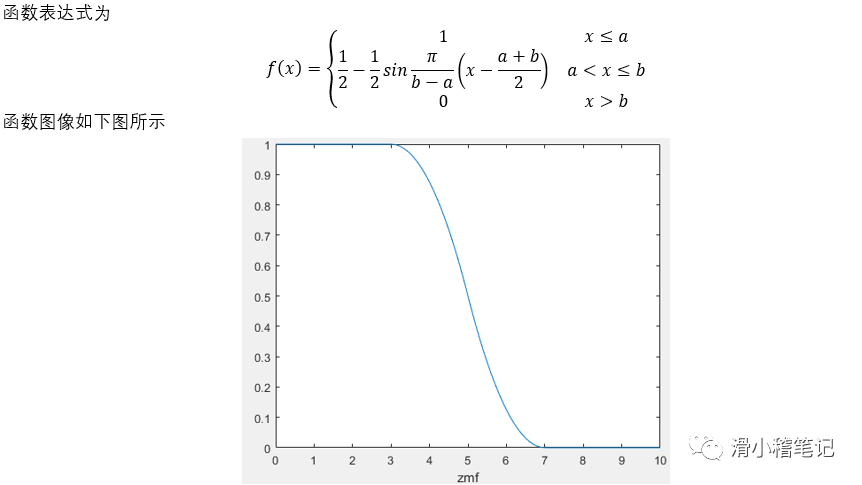
(2)S型隸屬度函數smf
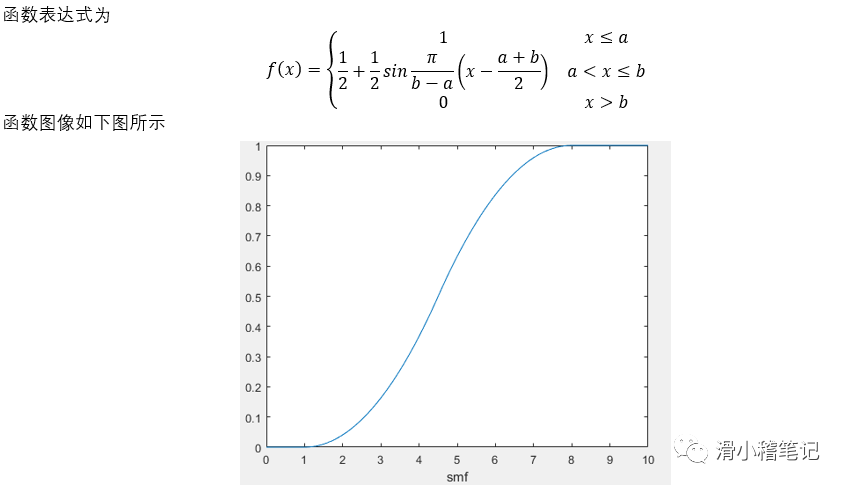
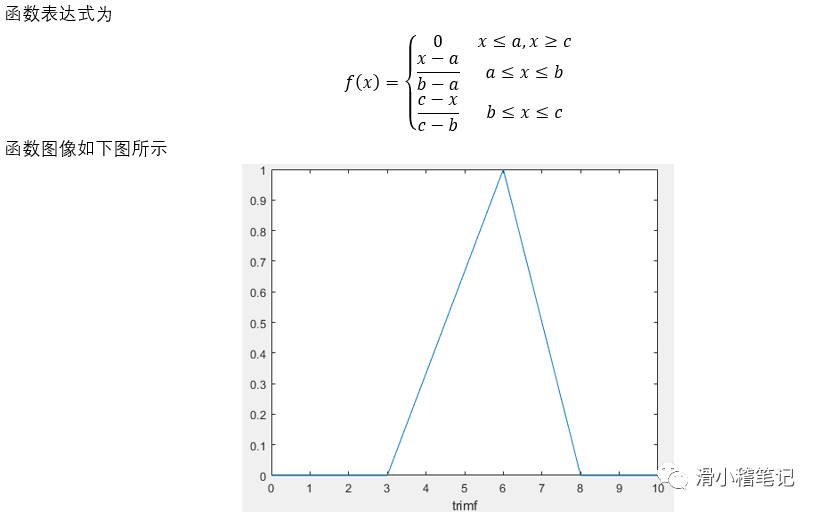
(3)三角形隸屬度函數trimf
**1.2 **模糊控制數學基礎
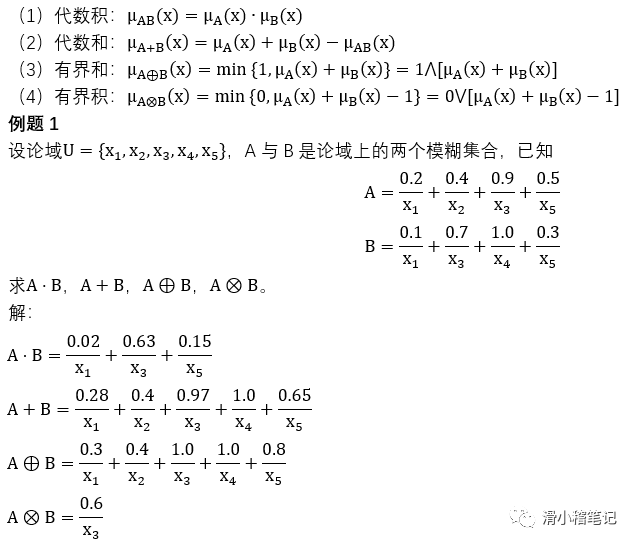
1.2.1 模糊控制集合的代數運算
1.2.2 模糊關系
(1)普通關系:兩個集合中的元素之間是否有關聯。
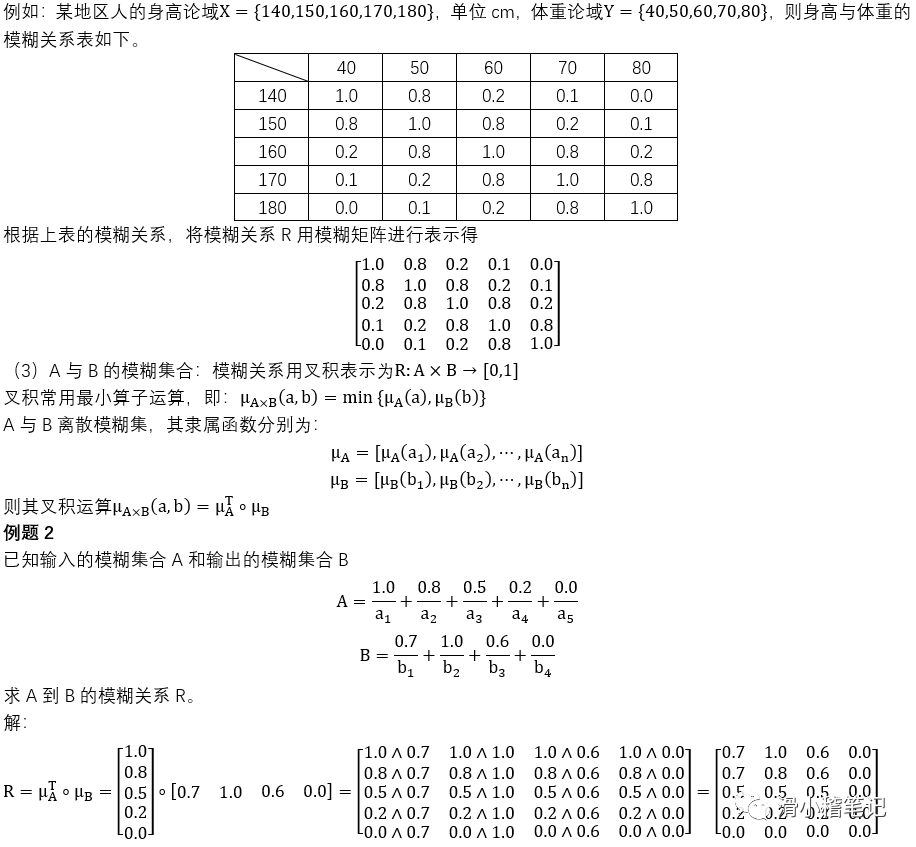
(2)模糊關系:兩個模糊集合中的元素之間關聯程度的多少。
1.2.3 模糊關系的合成
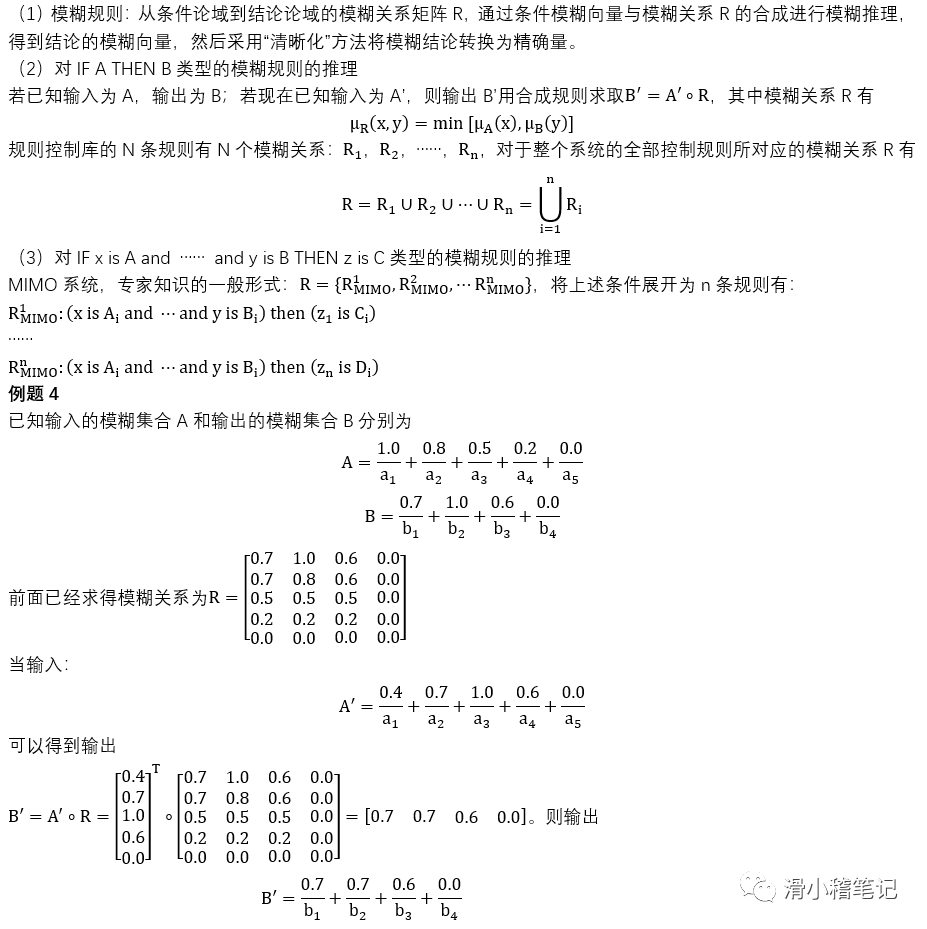
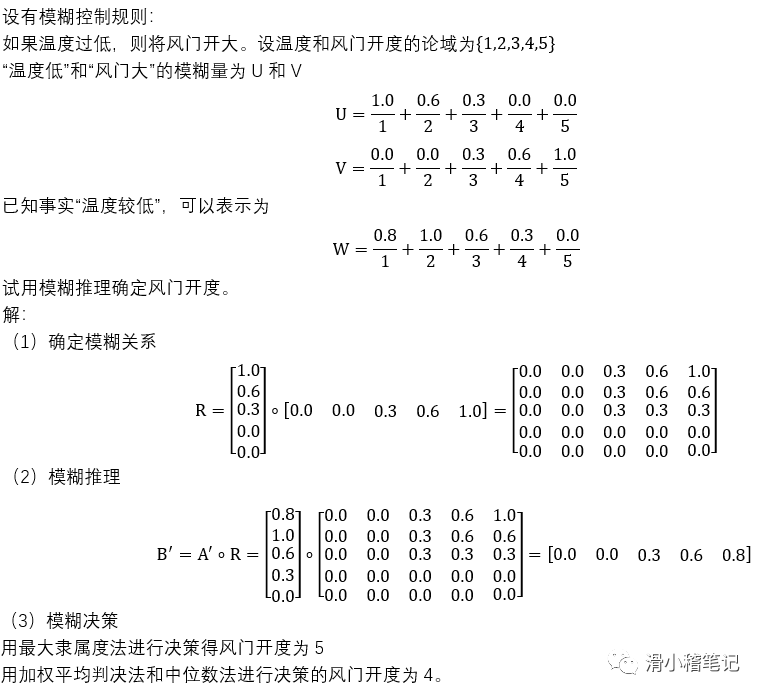
1.2.4 模糊推理
1.2.5 模糊決策
模糊決策(模糊判決,解模糊,清晰化):由模糊推理得到的結論或者操作是一個模糊向量,轉化為確定值的過程。
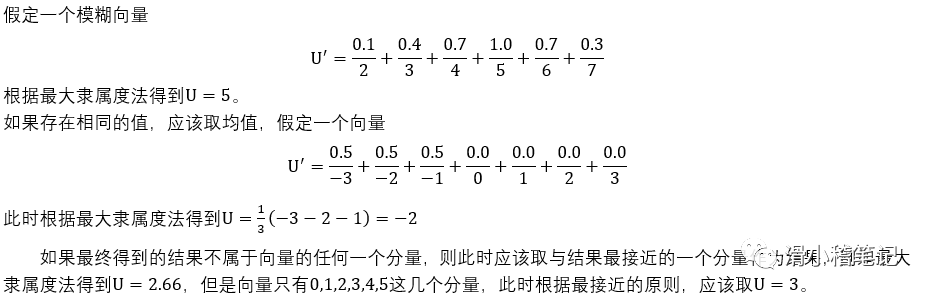
(1)最大隸屬度法
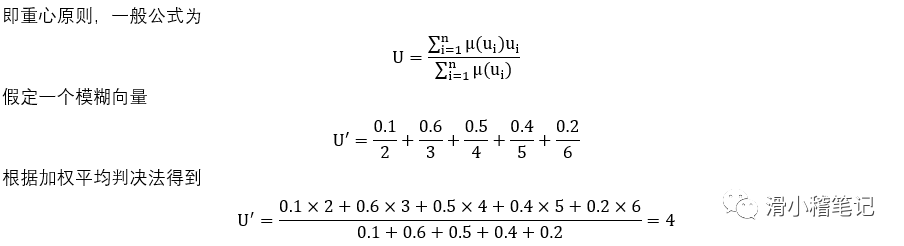
(2)加權平均判決法
(3)中位數法

-
智能控制
+關注
關注
4文章
588瀏覽量
42226 -
模糊控制
+關注
關注
2文章
261瀏覽量
25487 -
模糊算法
+關注
關注
0文章
16瀏覽量
8738 -
自然語言
+關注
關注
1文章
287瀏覽量
13330
發布評論請先 登錄
相關推薦
PID算法之模糊PID 精選資料推薦
PID算法學習筆記分享

基于深度學習的圖像去模糊算法及應用
MATLAB學習筆記之模糊算法2
MATLAB學習筆記之模糊算法3
MATLAB學習筆記之WM算法





 工商網監
工商網監
評論