 ?詳細剖析模板匹配
?詳細剖析模板匹配
模板匹配介紹
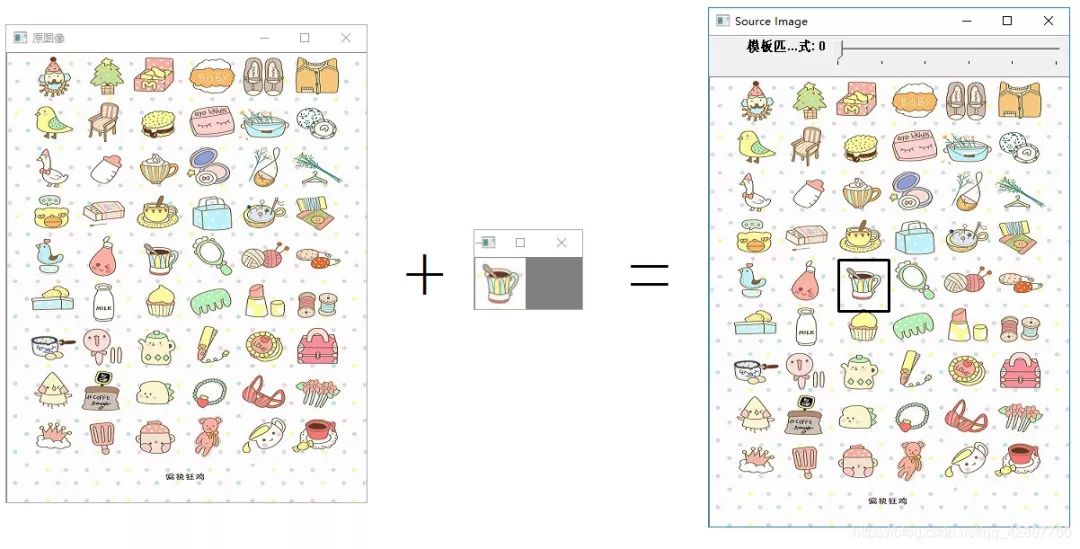
我們需要2幅圖像:
原圖像 (I):在這幅圖像里,我們希望找到一塊和模板匹配的區域
模板 (T):將和原圖像比照的圖像塊
-
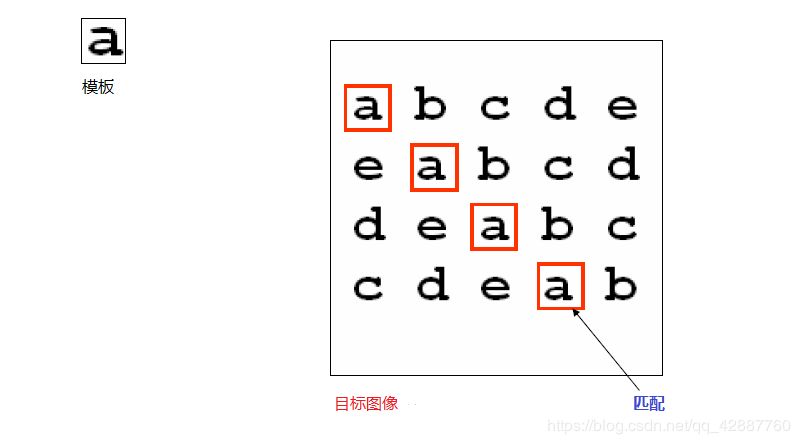
模板匹配就是在整個圖像區域發現與給定子圖像匹配的小塊區域。
-
所以模板匹配首先需要一個模板圖像T(給定的子圖像)
-
另外需要一個待檢測的圖像-源圖像S
-
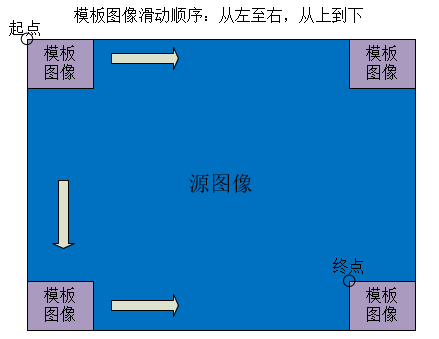
工作方法,在帶檢測圖像上,從左到右,從上向下計算模板圖像與重疊子圖像的匹配度,匹配程度越大,兩者相同的可能性越大。
模板匹配原理
我們的目標是檢測最匹配模板的原圖像的區域:
為了確定匹配模板區域, 我們不得不滑動模板圖像和原圖像進行比較 :

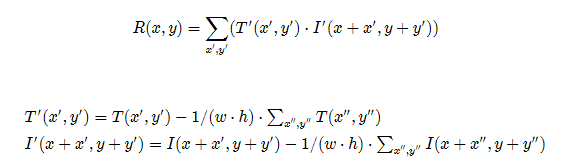
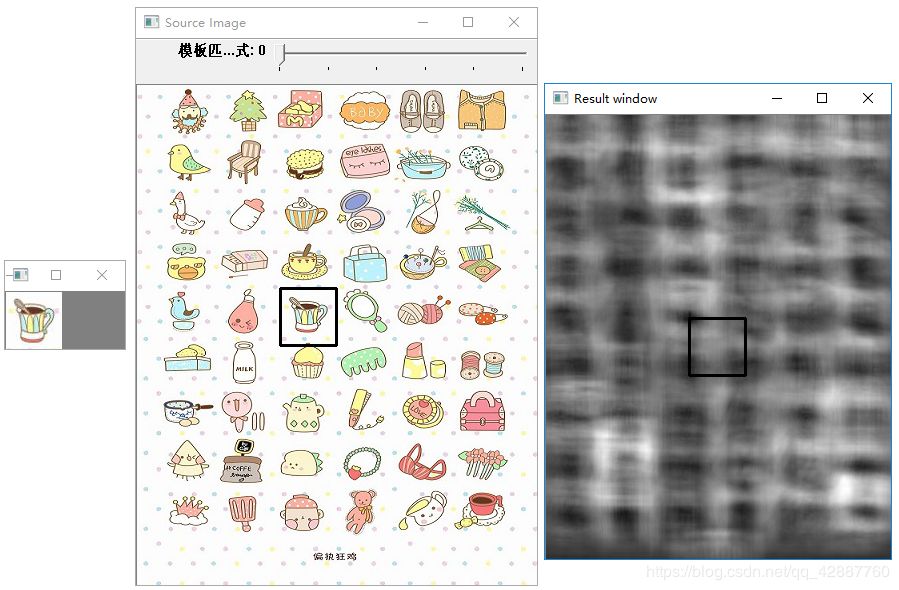
對于 模板(T) 覆蓋在 原圖像 (I) 上的每個位置,你把度量值保存 到 結果圖像矩陣 ( R ) 中. 在 R 中的每個位置 (x,y) 都包含匹配度量值:
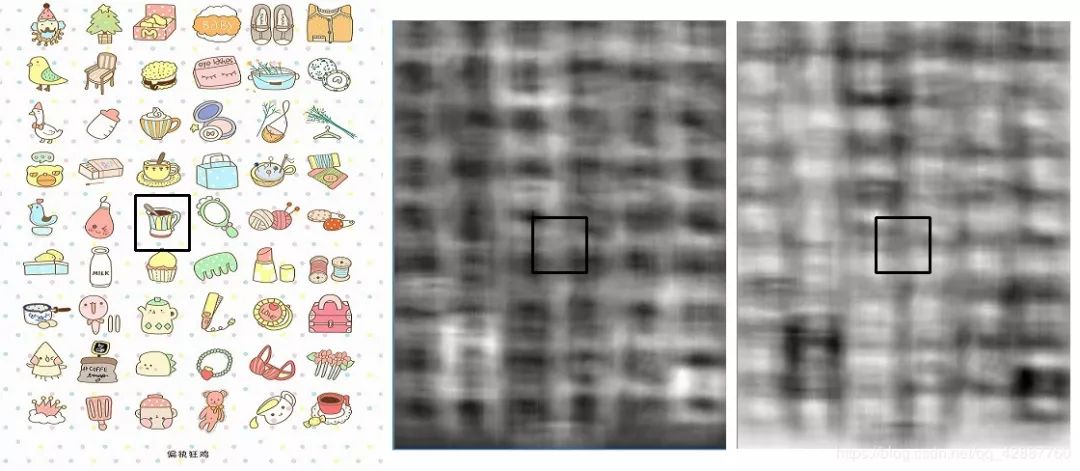
上圖(右)就是TM_CCORR_NORMED方法處理后的結果圖像 R . 最白的位置代表最高的匹配. 正如您所見, 黑色框住的位置很可能是結果圖像矩陣中的最大數值, 所以這個區域 (以這個點為頂點,長寬和模板圖像一樣大小的矩陣) 被認為是匹配的.
實際上, 我們使用函數minMaxLoc來定位在矩陣 R 中的最大值點 (或者最小值, 根據函數輸入的匹配參數) .
voidminMaxLoc(InputArray src,double* minVal,double* maxVal=0, Point* minLoc=0, Point* maxLoc=0, InputArray mask=noArray())
-
src:輸入圖像。
-
minVal:在矩陣 src中存儲的最小值,可輸入NULL表示不需要。
-
maxVal :在矩陣 src中存儲的最大值,可輸入NULL表示不需要。
-
minLoc:在結果矩陣中最小值的坐標,可輸入NULL表示不需要,Point類型。
-
maxLoc:在結果矩陣中最大值的坐標,可輸入NULL表示不需要,Point類型。
-
mask:可選的掩模
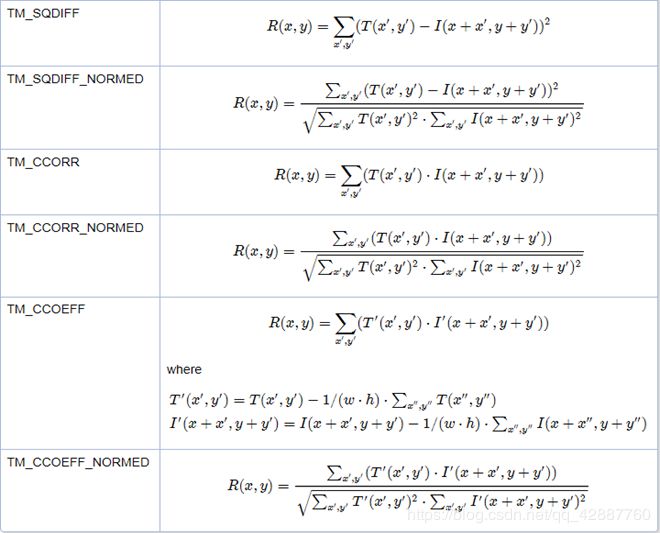
模板匹配介紹 – 匹配算法介紹:
OpenCV中提供了六種常見的匹配算法如下:
-
計算平方不同 :計算出來的值越小,越相關TM_SQDIFF = 0

-
計算相關性:計算出來的值越大,越相關TM_CCORR = 2

-
計算相關系數:計算出來的值越大,越相關TM_CCOEFF = 4
-
計算歸一化平方不同 :計算出來的值越接近0,越相關TM_SQDIFF_NORMED = 1

-
計算歸一化相關性:計算出來的值越接近1,越相關TM_CCORR_NORMED = 3

-
計算歸一化相關系數:計算出來的值越接近1,越相關TM_CCOEFF_NORMED = 5

總結如下:
matchTemplate(
InputArray image,// 源圖像,必須是8-bit或者32-bit浮點數圖像
InputArray templ,// 模板圖像,類型與輸入圖像一致
OutputArray result,// 輸出結果,必須是單通道32位浮點數,假設源圖像WxH,模板圖像wxh, 則結果必須為W-w+1, H-h+1的大小。
intmethod,//使用的匹配方法
InputArray mask=noArray()//(optional)
)

#include
運行結果

審核編輯 :李倩
-
圖像
+關注
關注
2文章
1083瀏覽量
40418 -
模板
+關注
關注
0文章
108瀏覽量
20554 -
函數
+關注
關注
3文章
4307瀏覽量
62433
原文標題:?詳細剖析模板匹配
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
什么是模板匹配?模板匹配的原理講解 圖像處理與模板匹配算法
labview 視覺 多模板匹配 教程
labview 視覺 多模板匹配 教程
基于模板匹配的電子元器件針腳檢測方法
基于模板匹配的圖像跟蹤技術
機器視覺中基于灰度統計的快速模板匹配算法詳細概述

探究halcon模板匹配干擾邊緣消除辦法
OpenCV邊緣模板匹配算法原理詳解






 工商網監
工商網監
評論