") 如何實現(xiàn)雙輪差速底盤躲避懸崖的功能?
如何實現(xiàn)雙輪差速底盤躲避懸崖的功能?
1. 功能說明
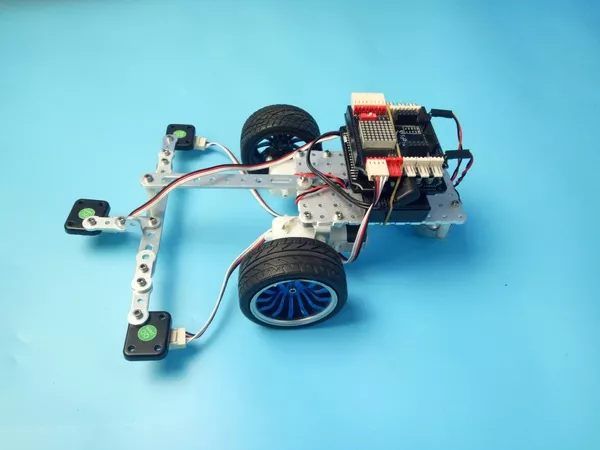
本實驗使用的樣機為R023樣機小型雙輪差速底盤。在樣機前方安裝3個近紅外傳感器 ,實現(xiàn)機器人躲避懸崖、在某平臺上移動時不會掉下去的效果。
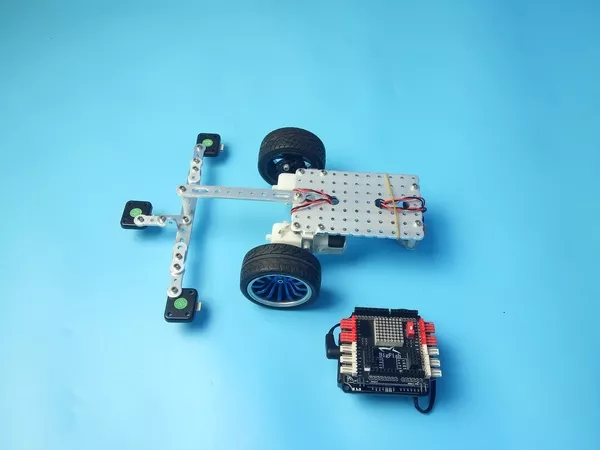
在這個示例中,我們采用了以下硬件,請大家參考:
| 主控板 | Basra(兼容Arduino Uno) |
| 擴展板 | Bigfish2.1 |
| 傳感器 | 近紅外傳感器 |
| 電池 | 7.4V鋰電池 |
左輪直流電機連在D9,D10接口上;右輪直流電機連在D5,D6接口上;3個近紅外傳感器從左到右分別連在A0、A4、A3接口上。
3. 示例程序
編程環(huán)境:Arduino 1.8.19
編寫并燒錄以下程序(nine.ino),該程序?qū)崿F(xiàn)演示視頻中的動作【完整資料請參考https://www.robotway.com/h-col-113.html】
/*------------------------------------------------------------------------------------ 版權(quán)說明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved. Distributed under MIT license.See file LICENSE for detail or copy at https://opensource.org/licenses/MIT by 機器譜 2023-02-10 https://www.robotway.com/ ------------------------------------------------------------------------------------*/ void Right(); void Left(); void Stop(); void Forward(); void Back(); void setup() { pinMode( 17, INPUT); pinMode( 18, INPUT); pinMode( 14, INPUT); pinMode( 10, OUTPUT); pinMode( 6, OUTPUT); pinMode( 5, OUTPUT); pinMode( 9, OUTPUT); } void loop() { if (((!( digitalRead(14)) && ! (digitalRead(17)) ) )) { Forward(); } if (( digitalRead(14) )) { Left(); delay( 300 ); } if (( digitalRead(17) )) { Right(); delay( 300 ); } if (( digitalRead(18) )) { Back(); delay( 1000 ); analogWrite(5 , 100); analogWrite(6 , 0); analogWrite(9 , 0); analogWrite(10 , 100); delay( 1500 ); } } void Right() { analogWrite(5 , 0); analogWrite(6 , 0); analogWrite(9 , 100); analogWrite(10 , 0); } void Forward() { analogWrite(5 , 100); analogWrite(6 , 0); analogWrite(9 , 100); analogWrite(10 , 0); } void Back() { analogWrite(5 , 0); analogWrite(6 , 100); analogWrite(9 , 0); analogWrite(10 , 100); } void Left() { analogWrite(5 , 100); analogWrite(6 , 0); analogWrite(9 , 0); analogWrite(10 , 0); } void Stop() { analogWrite(5 , 0); analogWrite(6 , 0); analogWrite(9 , 0); analogWrite(10 , 0); }
4. 擴展
本實驗采用3個近紅外傳感器,利用的是近紅外傳感器能夠識別到距離較近的桌面,無法識別到距離較遠的地面,因此桌面要距離地面遠一些。
本實驗還可以使用灰度傳感器或者白標傳感器。利用的是灰度和白標在懸崖處極難收到反射回來的紅外線的原理,因此相應(yīng)的桌面必須是淺色,如果桌面也是深色,灰度和白標傳感器就無法區(qū)分桌面和懸崖了。
審核編輯黃宇
?
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學習之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
傳感器
+關(guān)注
關(guān)注
2548文章
50698瀏覽量
752064 -
機器人
+關(guān)注
關(guān)注
210文章
28212瀏覽量
206566 -
編程
+關(guān)注
關(guān)注
88文章
3595瀏覽量
93604
發(fā)布評論請先 登錄
相關(guān)推薦
線控底盤,自動駕駛時代的基石?
結(jié)合市場發(fā)展趨勢和政策支持,展望了未來技術(shù)的應(yīng)用前景。 ? 線控底盤的定義與重要性 1.1 線控底盤的概念與發(fā)展背景 線控底盤(X-by-wire)技術(shù)通過電子信號取代傳統(tǒng)的機械連接和液壓系統(tǒng),
壓差變送器有哪些功能
在現(xiàn)代工業(yè)自動化領(lǐng)域,壓差變送器作為關(guān)鍵的壓力測量設(shè)備,扮演著重要的角色。特別是在需要高精度、高可靠性測量的嚴苛環(huán)境中,壓差變送器的性能直接影響著生產(chǎn)效率和產(chǎn)品質(zhì)量。

基于MATLAB平臺的智能底盤的虛擬化開發(fā)
智能底盤是汽車電動化和智能化趨勢下的關(guān)鍵創(chuàng)新點,它涉及到三電系統(tǒng)的集成、機械部件的精簡以及電控能力的增強。隨著輔助駕駛系統(tǒng)(如 ACC、AEB)的普及和自動駕駛技術(shù)的發(fā)展,智能底盤需要適應(yīng)越來越多的使用場景,同時提供更高水平的安全性和舒適性。
鳳凰動力-AGV差速驅(qū)動輪的工作原理
鳳凰動力致力于提供多元化的AGV核心零部件產(chǎn)品。包括臥式/立式驅(qū)動輪、臥式/立式舵輪、電轉(zhuǎn)向輪、差速舵輪組、AGV專用高精密腳輪、低壓伺服電機、伺服減速電機、伺服驅(qū)動器、專用連接器和高精密行星減速機
雙速電機與單速電機的區(qū)別
在電機技術(shù)領(lǐng)域,雙速電機和單速電機是兩種常見的電機類型。它們在結(jié)構(gòu)、工作原理、性能特點以及應(yīng)用領(lǐng)域等方面都存在顯著的差異。本文將對雙速電機和單速電機的區(qū)別進行詳細的闡述,以便讀者能夠更
智己L6純電轎車搭載數(shù)字底盤,具備預(yù)判救車功能
其中值得注意的是,新車搭載了名為“靈蜥數(shù)字底盤”的技術(shù)設(shè)備,據(jù)說能夠實現(xiàn)在85公里以上的高速公路上進行“麋鹿測試”,這是一種模擬前方突發(fā)障礙物的緊急避障性能測試。
探討底盤的發(fā)展歷程及趨勢
自汽車誕生一百余年以來,底盤發(fā)展就和汽車發(fā)展深度綁定。底盤系統(tǒng)決定了汽車縱向、橫向和垂向六個自由度的動態(tài)行為,是汽車能夠跑運行的必要條件。
發(fā)表于 04-11 10:13
?560次閱讀
經(jīng)緯恒潤全棧自研底盤域控制器量產(chǎn)
隨著汽車科技的迅猛發(fā)展,汽車EE架構(gòu)正從分布式到域集中式再到中央計算式快速過渡。整車ECU數(shù)量驟減,線束布置不斷優(yōu)化,控制功能不斷集中,域控制器作為整車EE架構(gòu)中的核心控制單元,具有舉足輕重的作用

汽車底盤控制技術(shù)研究
汽車底盤控制技術(shù)是指對汽車底盤系統(tǒng)進行控制和管理的一種技術(shù),其主要目的是提高汽車的性能、安全性和舒適性[2]。
發(fā)表于 02-19 16:39
?541次閱讀
差速器工作原理 差速器的傳動特點是差速不差力對嗎
差速器是一種廣泛應(yīng)用于汽車的機械裝置,其主要作用是在車輛行駛時發(fā)揮差速作用,從而使車輛在轉(zhuǎn)彎、過坎等情況下能夠保持穩(wěn)定。差速器的工作原理十分復雜,涉及到許多力學和工程原理,下面我們將詳細介紹差速器
自己設(shè)計開發(fā)的一些無刷電機控制器,希望壇友多多交流
遙控:支持HotRC SBUS接收機遙控
功能:雙輪速度同步閉環(huán),角速度閉環(huán),支持坡道駐車,比較好的走直線功能!
雙輪FOC控制器(小功率)
電壓:DC18-32V
電流:15A*2
發(fā)表于 01-30 18:15
差壓變送器功能及特點概述
差壓變送器功能及特點概述? 差壓變送器是一種常用于工業(yè)過程控制和測量領(lǐng)域的儀表設(shè)備,主要用于測量兩個壓力源之間的壓力差,并將其轉(zhuǎn)換為一個標準化的電信號輸出。它的
汽車底盤構(gòu)造名稱圖解
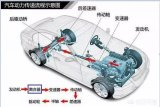
底盤作用是支承、安裝汽車發(fā)動機及其各部件、總成,形成汽車的整體造型,并接受發(fā)動機的動力,使汽車產(chǎn)生運動,保證正常行駛。底盤由傳動系、行駛系、轉(zhuǎn)向系和制動系四部分組成。
發(fā)表于 01-17 11:28
?1003次閱讀





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論