 克服旋轉振動的CVD系列2相雙極步進電機驅動器
克服旋轉振動的CVD系列2相雙極步進電機驅動器
使用經濟實惠的先進技術輕松將振動降至最低
理想情況下,步進電機應在所有速度范圍內平穩無振動地運行。實際上,它們在低速、中速或高速運行時會產生一些振動,從而產生不需要的噪音。這種振動稱為“旋轉振動”,開發旋轉振動抑制系統是一項重大挑戰。為了克服這個問題,通常將步進電機細分為許多更小的步進。然而,以今天的技術,單靠微步進是不夠的。并非所有步進電機驅動器或芯片都以相同的方式管理旋轉振動。本技術論文將解釋 CVD 系列 2 相雙極步進電機驅動器技術的優勢。
電流控制的改進
· 采用最新的微處理器技術和先進的算法,采用單相電流檢測方法
控制電機意味著控制流過電機繞組的電流。如果可以控制流過電機繞組的電流,則可以更平穩地運行電機。為此,檢測電機繞組電流的方式變得很重要。
從歷史上看,5 相步進電機技術的優勢之一是電路使用全相電流檢測方法,可同時檢測連接到電機的所有 5 根電機電纜(電線)的電流。由于該方法只需要一個檢測電路,電路簡單。但是,這種方法無法檢測到沒有經過檢測電路的回流電流。因此,電流控制變得不穩定,導致額外的驅動器設計步驟來控制振動。
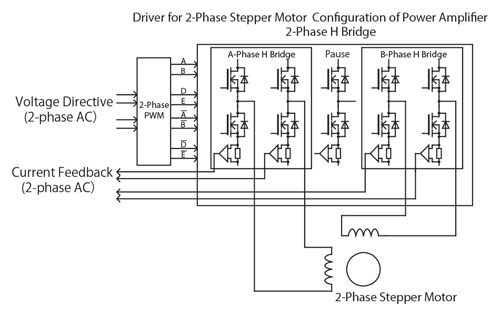
Oriental Motor 的 CVD 驅動器使用單相電流檢測方法來改進電流控制,該方法使用最新的微處理器分別檢測 5 種不同的電流,或者在 2 相 CVD 驅動器的情況下,4 種不同的電流控制(參見圖 1)技術與先進的算法編程。
帶電流校正的最大扭矩
· 利用電機的電磁電流特性,最大化電機扭矩輸出
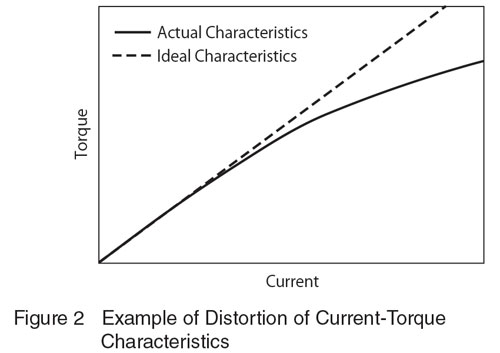
在電機繞組電流與比例扭矩輸出匹配的范圍內,電機輸出扭矩與電流成正比。隨著電流變大,即超過額定電流加在繞組上,由于磁通的電樞反應引起的磁飽和現象,電流與轉矩的關系逐漸偏離其正比關系(見圖2). 為了提高電機的輸出轉矩,需要有效利用比例關系發生偏離的范圍。
Advanced Microstepping
· Smooth Drive,使用最新的微處理器允許在所有速度范圍內進行微步進
由于步進電機在每個步進角運行和停止,因此它們能夠進行高精度的位置控制。但是,每旋轉一個基本步距角,轉子的速度就會發生變化,這可能會成為振動或噪音的原因。已實施微步來抑制這種類型的振動。微步進是一種通過控制流過電機繞組的電流來劃分電機基本步距角的技術。通過減小步距角,向前移動一步時的速度變化最小,從而可以實現低振動。
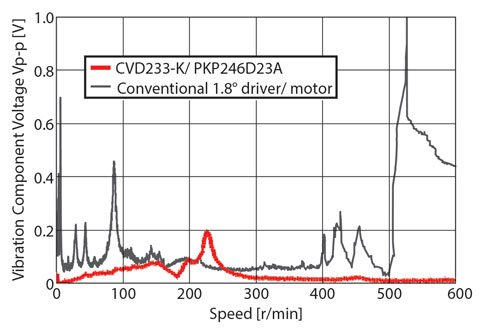
除了微步之外,CVD 還提供最先進的微步功能 Smooth Drive 技術,無需增加發送給驅動器的脈沖。帶有 Smooth Drive ON 功能的 CVD 自動微步,電機每整步 (1.8°) 最多可微步 2048 步 (0.0008°)。大多數微步驅動器提供高達每轉 51,200 微步 (0.007°) 的分辨率。啟用 Smooth Drive 后,這會顯著提高所有速度范圍內的整體性能,而不僅僅是較低的速度范圍(圖 3),從而大大減少可能導致步進錯誤的振動。這允許更寬的電機速度設計窗口到性能結果。
最小化扭矩紋波
· 校正提供給電機的正弦電流
改變勵磁相位時輸出轉矩的波動稱為轉矩脈動。理論上,通過將各相產生的扭矩改變為正弦波,不會產生扭矩波動。如果電機電流與產生的轉矩呈線性關系,則通過將各相電流變為正弦波就不會產生轉矩脈動。但是,電機電流和產生的扭矩之間的關系不是線性形式。因此,當將各相電流改變為正弦波時,電流值較大的地方會發生轉矩畸變,從而引起振動。簡而言之,同時處理高輸出扭矩和低振動需要額外的控制機制。
為了解決這個問題,CVD 驅動器適當地校正提供給電機的正弦電流的相位。這產生了校正電流-扭矩特性失真的效果,從而能夠同時處理低振動和高輸出扭矩。此外,這還提高了停止位置的準確性。
圖 4 顯示了通過相位校正改善了多少旋轉振動特性。激活相位校正可顯著改善振動的峰值。
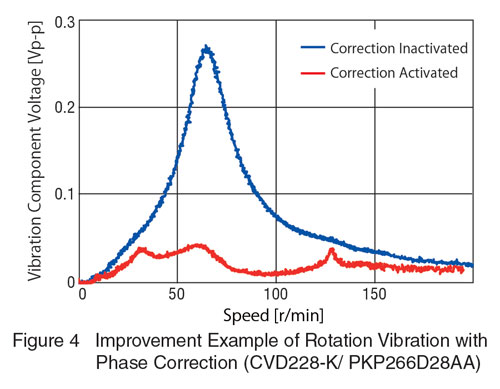
相位修正的最佳值根據電動機的磁特性而變化。為此,為每個與電機組合的驅動器設置最佳校正量。
考慮到電機的磁特性,進行電流控制,同時發揮高性能——這是同時開發電機和驅動器的Oriental Motor的優勢之一。
審核編輯:湯梓紅
-
驅動器
+關注
關注
52文章
8168瀏覽量
146052 -
步進電機
+關注
關注
150文章
3097瀏覽量
147357 -
CVD
+關注
關注
1文章
72瀏覽量
10726
發布評論請先 登錄
相關推薦
步進電機驅動器的主要驅動方式有哪些?簡單介紹
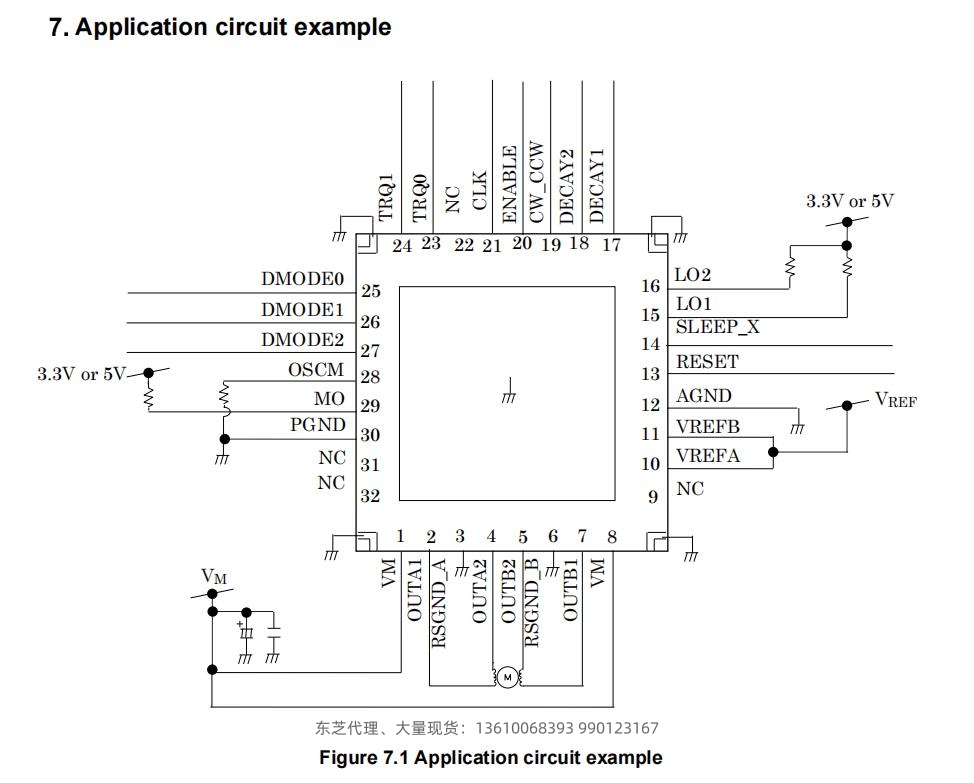
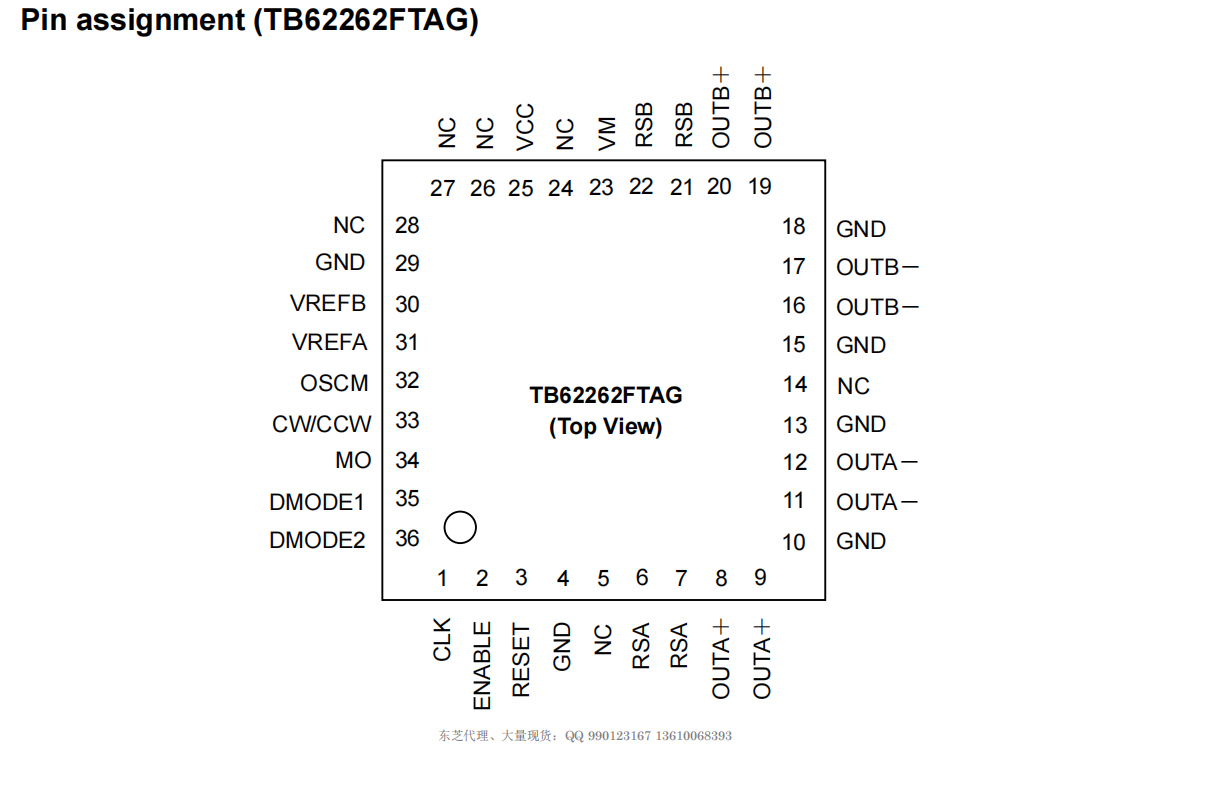
介紹東芝TB62262FTAG芯片:高性能兩相雙極步進電機驅動器






 工商網監
工商網監
評論