") 工業(yè)網(wǎng)絡(luò)通信新概念及FLEX產(chǎn)品介紹
工業(yè)網(wǎng)絡(luò)通信新概念及FLEX產(chǎn)品介紹
工業(yè)網(wǎng)絡(luò)通信新概念及FLEX產(chǎn)品介紹
為了滿足各種要求,設(shè)備中的可編程邏輯控制器 (PLC) 和電機(jī)/驅(qū)動(dòng)器已通過(guò)多種方式連接,例如脈沖序列、數(shù)字 I/O 和現(xiàn)場(chǎng)總線網(wǎng)絡(luò)。
我們開(kāi)發(fā)了可以連接到多個(gè)工業(yè)網(wǎng)絡(luò)的產(chǎn)品。它們可以連接到 I/O 設(shè)備和 Modbus RTU 網(wǎng)絡(luò)。它們還可以通過(guò)網(wǎng)絡(luò)轉(zhuǎn)換器(我們的網(wǎng)關(guān)產(chǎn)品)連接到其他現(xiàn)場(chǎng)總線網(wǎng)絡(luò)。這些產(chǎn)品可以靈活地連接到一個(gè)主機(jī) PLC,它允許客戶根據(jù)他們的需要選擇一個(gè)系統(tǒng)。我們稱這個(gè)概念為 FLEX。由于部分FLEX產(chǎn)品具有定位功能,因此可以省去上位PLC的定位單元,從而降低設(shè)備成本。FLEX 產(chǎn)品允許客戶通過(guò)利用工業(yè)網(wǎng)絡(luò)的每個(gè)優(yōu)點(diǎn)來(lái)降低開(kāi)發(fā)設(shè)備的成本和時(shí)間。
我們以“降低成本”和“縮短設(shè)備啟動(dòng)時(shí)間”為關(guān)鍵詞介紹每個(gè)控制系統(tǒng)和FLEX產(chǎn)品的優(yōu)點(diǎn)。
一、簡(jiǎn)介
關(guān)于生產(chǎn)設(shè)備存在各種要求和需求,例如降低成本、縮短新設(shè)備的啟動(dòng)時(shí)間、提高生產(chǎn)率、節(jié)能和可追溯性。在過(guò)去的幾年中,人們強(qiáng)烈需要降低成本。然而,僅僅為了降低設(shè)備成本而削弱設(shè)備性能絕不是一個(gè)好主意,因?yàn)檫@會(huì)危及我們的競(jìng)爭(zhēng)力。為了與低成本設(shè)備制造商競(jìng)爭(zhēng),關(guān)注在保持設(shè)備性能的同時(shí)降低成本的“性價(jià)比”變得很重要,而不是僅僅關(guān)注“降低成本”方面。此外,必須盡早將機(jī)器推向市場(chǎng),以便在競(jìng)爭(zhēng)對(duì)手中占上風(fēng)。近年來(lái),這種要求變得更加嚴(yán)格。
2.什么是FLEX
FLEX是工業(yè)網(wǎng)絡(luò)通訊產(chǎn)品配套的總稱;(1) I/O 控制,(2) Modbus RTU 控制(注 1)和 (3) 通過(guò)網(wǎng)絡(luò)轉(zhuǎn)換器進(jìn)行的工廠自動(dòng)化 (FA) 網(wǎng)絡(luò)控制。Oriental Motor提供FLEX作為一個(gè)系統(tǒng),可以根據(jù)用戶的需要自由選擇,并靈活地與各種上位控制器連接。FLEX 工業(yè)網(wǎng)絡(luò)通信產(chǎn)品兼容這三種控制方法(參見(jiàn)圖 1)。
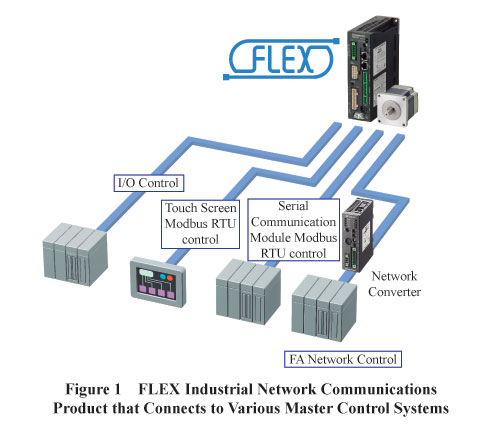
(1) I/O 控制- 由于 I/O 控制使電機(jī)僅通過(guò) ON/OFF 信號(hào)即可輕松移動(dòng),從而導(dǎo)致“縮短設(shè)備啟動(dòng)時(shí)間”。此外,主控系統(tǒng)使用簡(jiǎn)單的輸入/輸出設(shè)備,因此可以以“最低成本”構(gòu)建。
(2) Modbus RTU 控制- Modbus RTU 控制是串行通訊控制的一種(參考4.2 節(jié))。串行通信抗噪能力強(qiáng),通信線路最長(zhǎng)可延長(zhǎng) 50m(164.04 英尺)(注 2),從而實(shí)現(xiàn)“成本降低”。兼容串口通信的主控系統(tǒng)有很多,可以像I/O控制一樣不受廠商的約束,自由選擇。此外,由于大多數(shù)觸摸屏都標(biāo)配了 Modbus 通信,因此很容易通過(guò)觸摸屏進(jìn)行操作。
自由選擇制造商的能力(擴(kuò)大設(shè)備設(shè)計(jì)的可能性)和能夠通過(guò)觸摸屏操作很容易導(dǎo)致“縮短新設(shè)備推出時(shí)間”。
(注1) Modbus是Modbus-IDA的注冊(cè)商標(biāo)。
(注 2) 最大延伸長(zhǎng)度 50m (164.04ft.) 是 Oriental Motor 兼容 Modbus 的產(chǎn)品規(guī)格。
(3) 通過(guò)網(wǎng)絡(luò)轉(zhuǎn)換器進(jìn)行工廠自動(dòng)化(FA) 網(wǎng)絡(luò)控制- 通過(guò)網(wǎng)絡(luò)轉(zhuǎn)換器進(jìn)行工廠自動(dòng)化(FA) 網(wǎng)絡(luò)控制的產(chǎn)品可與CC-Link、MECHATROLINK- II / III 或Ether CAT 連接。由于 FA 網(wǎng)絡(luò)需要更少的布線,隨著電機(jī)數(shù)量的增加,“成本降低”變得更加明顯。FA 網(wǎng)絡(luò)通過(guò)專用通信 IC 自動(dòng)發(fā)送和接收數(shù)據(jù)。因此,電機(jī)可以在 I/O 控制的意義上運(yùn)行。這也導(dǎo)致“推出新設(shè)備的時(shí)間縮短”。
相應(yīng)地,F(xiàn)LEX產(chǎn)品因兼容工業(yè)網(wǎng)絡(luò)通信而連接到各種主控系統(tǒng),從而充分發(fā)揮各產(chǎn)品的優(yōu)勢(shì)。步進(jìn)電機(jī)和具有定位控制功能的中空旋轉(zhuǎn)執(zhí)行器以及具有速度控制功能的無(wú)刷電機(jī)是 FLEX 產(chǎn)品線的一部分(參見(jiàn)圖 2)。通過(guò)使用 FLEX 產(chǎn)品,可以使用相同的控制(連接)方法連接具有不同操作目的的電機(jī)。

3. 內(nèi)置控制器(存儲(chǔ)數(shù)據(jù))類型
3.1。什么是內(nèi)置控制器(存儲(chǔ)數(shù)據(jù))類型?
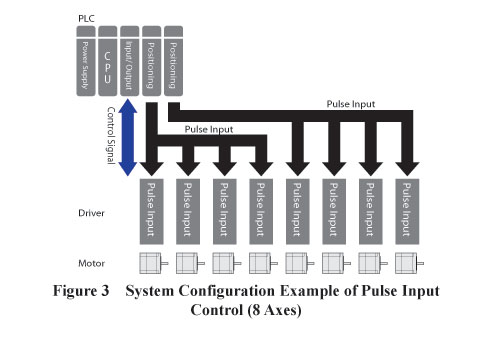
除了電機(jī)和驅(qū)動(dòng)器(放大器)之外,以伺服電機(jī)和步進(jìn)電機(jī)為代表的定位控制電機(jī)還需要脈沖發(fā)生器,也稱為定位模塊或 PLC 控制器(參見(jiàn)圖 3)。
對(duì)于Oriental Motor的FLEX Industrial Network Connections產(chǎn)品線,特別是定位控制步進(jìn)電機(jī),驅(qū)動(dòng)器配備了脈沖發(fā)生器,因此脈沖發(fā)生器(PLC的定位模塊)可以從主控系統(tǒng)中去除。這導(dǎo)致設(shè)備的“總體成本降低”(參見(jiàn)圖 4)。
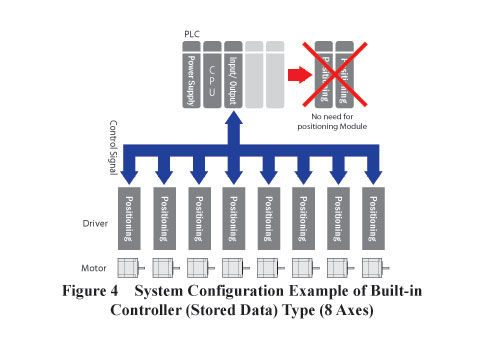
另外,驅(qū)動(dòng)器內(nèi)置的脈沖發(fā)生器不僅僅是脈沖發(fā)生器,還具有可用于定位控制的各種功能。各種定位功能在下一章介紹。
3.2. 內(nèi)置控制器的各種功能(存儲(chǔ)數(shù)據(jù))類型
3.2.1。可設(shè)定停機(jī)時(shí)間的操作功能
有一種稱為“連動(dòng)操作 2”的功能,適用于簡(jiǎn)單的來(lái)回操作,可以預(yù)設(shè)移動(dòng)量和速度。它通過(guò)單個(gè) ON 開(kāi)關(guān)簡(jiǎn)化了啟動(dòng)信號(hào)(參見(jiàn)圖 5)。
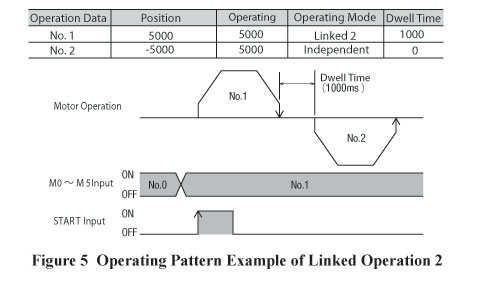
“聯(lián)動(dòng)運(yùn)行 2”功能允許通過(guò)驅(qū)動(dòng)程序設(shè)置運(yùn)行之間的停止時(shí)間(停留時(shí)間)。因此,可以用單個(gè)啟動(dòng)信號(hào)進(jìn)行簡(jiǎn)單的來(lái)回操作。這適用于例如在工作完成時(shí)自動(dòng)將負(fù)載帶回原始位置的應(yīng)用。使用此功能,可以消除 PLC 編程創(chuàng)建負(fù)荷(設(shè)計(jì)工時(shí))。
3.2.2. 依次執(zhí)行定位運(yùn)行的運(yùn)行功能
對(duì)于需要定期進(jìn)給(間距進(jìn)給)的輸送機(jī)和儲(chǔ)料器運(yùn)輸?shù)葢?yīng)用,稱為“順序定位操作”的功能很方便。“順序定位運(yùn)行”是每次啟動(dòng)信號(hào)ON時(shí)依次執(zhí)行運(yùn)行數(shù)據(jù)編號(hào)的功能。
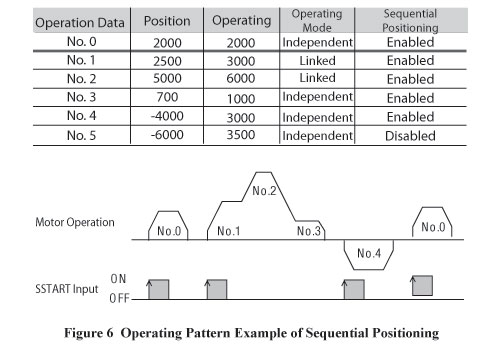
通過(guò)預(yù)先設(shè)定移動(dòng)量、速度、動(dòng)作功能等的值,反復(fù)啟動(dòng)信號(hào)的ON/OFF(輸入輸出信號(hào)的ON/OFF),可以執(zhí)行各種動(dòng)作模式。此外,原點(diǎn)復(fù)位運(yùn)行、連續(xù)運(yùn)行(運(yùn)行數(shù)據(jù)切換時(shí)的變速運(yùn)行)等PLC定位模塊的大部分功能都內(nèi)置于驅(qū)動(dòng)器中。
3.2.3. 同向無(wú)限操作功能
當(dāng)電機(jī)在旋轉(zhuǎn)機(jī)構(gòu)中連續(xù)沿同一方向運(yùn)轉(zhuǎn),到達(dá)指令位置的最大值時(shí),該值變?yōu)樽钚≈怠.?dāng)命令位置像這樣循環(huán)時(shí),就很難控制電機(jī)位置。這個(gè)問(wèn)題可以通過(guò)在一圈或多圈內(nèi)的任何給定點(diǎn)自動(dòng)將電機(jī)位置信息重置為零來(lái)解決。東方馬達(dá)將此功能稱為“圓形功能”。這可用于索引表和轉(zhuǎn)盤等應(yīng)用(參見(jiàn)圖 7)。
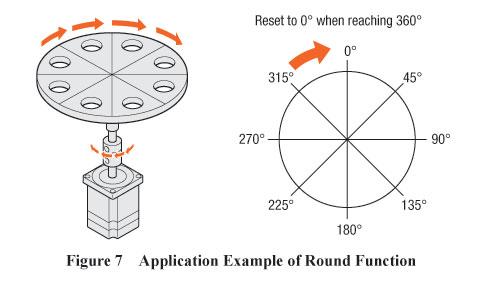
此外,通過(guò)將循環(huán)功能和保留和存儲(chǔ)電機(jī)位置信息的絕對(duì)系統(tǒng)與電池備份系統(tǒng)相結(jié)合,可以構(gòu)建具有不返回原點(diǎn)操作的“無(wú)限多次旋轉(zhuǎn)操作系統(tǒng)”。該圓形功能安裝在AR系列FLEX內(nèi)置控制器型和中空旋轉(zhuǎn)執(zhí)行器DG II系列FLEX內(nèi)置控制器型上(參見(jiàn)圖8)。

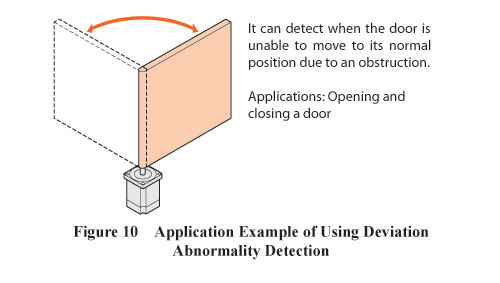
3.2.4. 偏差異常檢測(cè)功能(編碼器型電機(jī))
偏差異常檢測(cè)功能適用于0.72°/0.36°步進(jìn)電機(jī)和驅(qū)動(dòng)器套件CRK系列FLEX內(nèi)置控制器類型。通過(guò)使用編碼器型電機(jī),更容易檢測(cè)電機(jī)的位置錯(cuò)誤等異常情況(參見(jiàn)圖 9 和 10)。
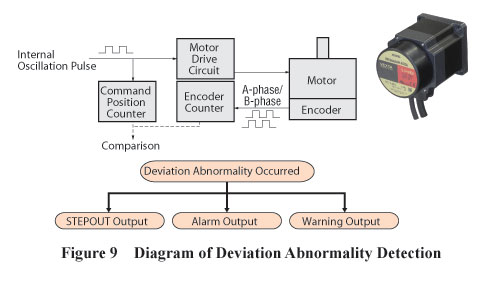
因?yàn)樗恍枰粋€(gè)編碼器連接到一個(gè)驅(qū)動(dòng)器上,所以不需要在上位PLC上增加計(jì)數(shù)器模塊等設(shè)備。因此,它不僅能以低成本檢測(cè)出偏差異常,而且省去了上位PLC計(jì)算偏差異常的編程勞動(dòng),從而縮短了設(shè)備啟動(dòng)時(shí)間。
內(nèi)置控制器(存儲(chǔ)數(shù)據(jù))類型配備了PLC的定位模塊功能,以及上述功能。相應(yīng)地,它不需要PLC的定位模塊,使用戶更容易控制目標(biāo)性能。
4、FLEX的各種控制方式
4.1.輸入輸出控制
I/O 控制使用驅(qū)動(dòng)器正面的 I/O 信號(hào)端子監(jiān)控電機(jī)(參見(jiàn)圖 11)。
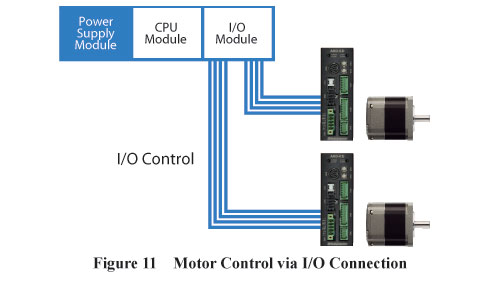
因?yàn)?I/O 控制直接打開(kāi)和關(guān)閉 I/O 信號(hào),所以它在工業(yè)網(wǎng)絡(luò)通信方法中具有最小的延遲。對(duì)于節(jié)拍時(shí)間緊的設(shè)備,這種I/O控制或脈沖輸入控制都適用。
此外,通過(guò)繼電器控制的 I/O 信號(hào)的簡(jiǎn)單 ON/OFF 即可輕松控制電機(jī),因此 PLC 編程可以輕松完成,有助于縮短設(shè)備啟動(dòng)時(shí)間。對(duì)于簡(jiǎn)單的設(shè)備,可以通過(guò)外部開(kāi)關(guān)操作電機(jī),無(wú)需上位 PLC,從而降低成本。
另一方面,I/O控制的缺點(diǎn)是需要多根線,并且不能隨意改寫操作數(shù)據(jù)(移動(dòng)量和速度)。因此,I/O 控制僅限于按負(fù)載預(yù)先確定操作模式的應(yīng)用程序。這些缺點(diǎn)可以通過(guò)網(wǎng)絡(luò)轉(zhuǎn)換器通過(guò) Modbus RTU 控制和工廠自動(dòng)化 (FA) 網(wǎng)絡(luò)控制來(lái)解決。
4.2. Modbus RTU 控制
Modbus 是主要與 PLC 一起使用的串行通信協(xié)議(通信程序),由 Modicon Inc. (AEG Schneider Automation International SAS) 開(kāi)發(fā)。其協(xié)議規(guī)范已在全球發(fā)布。它已被用于許多工業(yè)領(lǐng)域,例如條形碼閱讀器、RFID(IC 標(biāo)簽等)、位移傳感器、稱重傳感器、熱調(diào)節(jié)器和視覺(jué)傳感器(相機(jī))。許多設(shè)備,例如逆變器,現(xiàn)在都與 Modbus 兼容。為了通過(guò)主機(jī) PLC 使用 Modbus 控制,需要一個(gè)串行通信模塊(參見(jiàn)圖 12)。
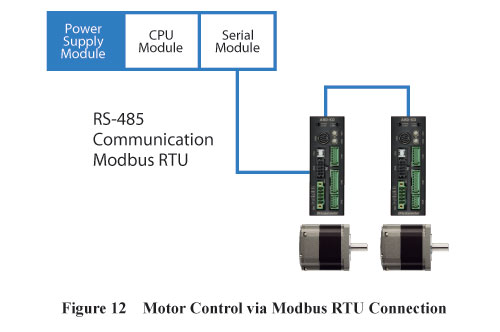
對(duì)于觸摸屏,大多數(shù)廠商都標(biāo)配了Modbus通訊協(xié)議,因此只要設(shè)置好Modbus RTU的串口通訊方式,就可以輕松通訊。如上所述,Modbus 有多種連接設(shè)備。由于Oriental Motor的產(chǎn)品能夠?qū)⒍噙_(dá)31個(gè)軸連接到一個(gè)Modbus主控制器,因此可以降低成本,因?yàn)椴恍枰狿LC的定位模塊。Modbus控制的能力在于,除了可以啟動(dòng)和停止電機(jī)外,還可以自由改寫運(yùn)行量和速度等運(yùn)行數(shù)據(jù),這是I/O控制無(wú)法做到的。運(yùn)行電流等參數(shù)也可以更改。此外,它還能夠獲取各種信息,例如報(bào)警代碼、
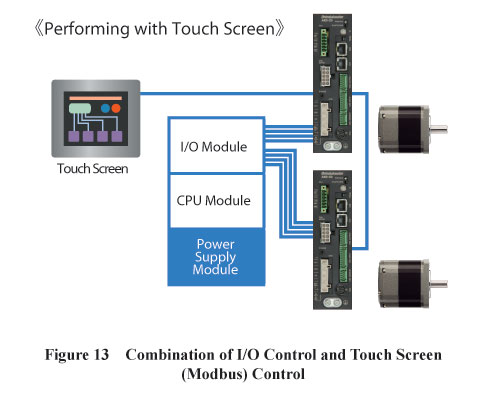
這些優(yōu)點(diǎn)不僅適用于 Modbus 控制,還適用于通過(guò)網(wǎng)絡(luò)轉(zhuǎn)換器進(jìn)行的工廠自動(dòng)化 (FA) 網(wǎng)絡(luò)控制,這將在下一節(jié)中進(jìn)行討論。以下是結(jié)合 I/O 控制和 Modbus 控制的應(yīng)用示例(參見(jiàn)圖 13)。一般情況下,I/O控制驅(qū)動(dòng)電機(jī),需要變更移動(dòng)量和速度時(shí)(機(jī)型變更等)使用觸摸屏。
這種配置以“最低成本”實(shí)現(xiàn),減少了PLC編程的設(shè)計(jì)工時(shí)。此外,I/O 控制的啟動(dòng)時(shí)間約為 10ms,因此可以縮短節(jié)拍時(shí)間。
對(duì)于變頻器的控制,過(guò)去以模擬電壓或模擬量的速度指令為主流方式,但近來(lái)以Modbus通訊方式的數(shù)字控制方式逐漸普及(見(jiàn)圖14)。
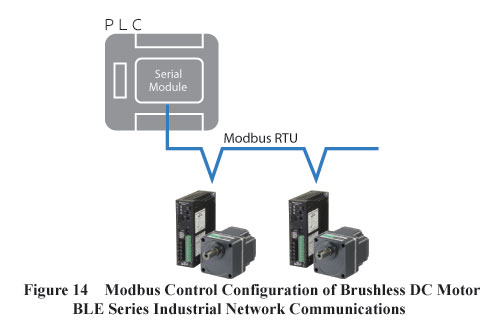
與模擬控制相反,通過(guò)Modbus通信進(jìn)行數(shù)字控制的優(yōu)點(diǎn)是數(shù)字控制抗噪聲能力強(qiáng),可以延長(zhǎng)配線長(zhǎng)度。Oriental Motor的無(wú)刷BLE系列調(diào)速電機(jī)兼容Modbus RTU控制。
4.3. 工廠自動(dòng)化 (FA) 網(wǎng)絡(luò)控制(通過(guò)網(wǎng)絡(luò)轉(zhuǎn)換器)
工廠自動(dòng)化 (FA) 網(wǎng)絡(luò)控制有幾種領(lǐng)先的協(xié)議,例如 DeviceNet、CC-Link、MECHATROLINK、SSCNET、Modbus 和 CANopen。最近,其他網(wǎng)絡(luò)控制,例如基于以太網(wǎng)的 EtherCAT、EtherNet/IP、PROFINET 和 CC-Link/IE,開(kāi)始流行起來(lái)。網(wǎng)絡(luò)轉(zhuǎn)換器是一種協(xié)議轉(zhuǎn)換設(shè)備,將FA網(wǎng)絡(luò)的協(xié)議轉(zhuǎn)換為Modbus(RT)/ RS-485協(xié)議,以便在各種FA網(wǎng)絡(luò)下控制FLEX工業(yè)網(wǎng)絡(luò)通信產(chǎn)品(參見(jiàn)圖15)。
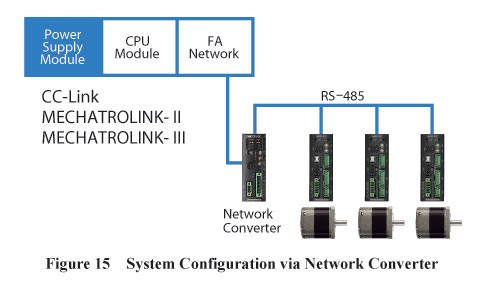
在網(wǎng)絡(luò)轉(zhuǎn)換器方面,東方馬達(dá)提供多種兼容Ether-CAT、CC-Link、MECHATROLINK-II、MECHATROLINK-III的轉(zhuǎn)換器產(chǎn)品,以滿足網(wǎng)絡(luò)需求。
換句話說(shuō),無(wú)需修改位于網(wǎng)絡(luò)轉(zhuǎn)換器下方的驅(qū)動(dòng)器和電機(jī)等產(chǎn)品的機(jī)構(gòu)設(shè)計(jì)或圖表,這使其能夠與各種FA工業(yè)網(wǎng)絡(luò)通信兼容,從而減少了設(shè)計(jì)工時(shí)。通過(guò)使用網(wǎng)絡(luò)轉(zhuǎn)換器,可以輕松實(shí)現(xiàn)與每個(gè)網(wǎng)絡(luò)兼容的設(shè)備變化。
由于網(wǎng)絡(luò)轉(zhuǎn)換器與多種網(wǎng)絡(luò)兼容,因此需要的布線更少,而 I/O 控制則需要對(duì)多個(gè) I/O 信號(hào)進(jìn)行布線。不僅布線變得更簡(jiǎn)單,而且布線工作和錯(cuò)誤也減少了。在效能和成本方面,隨著電機(jī)數(shù)量的增加,其優(yōu)勢(shì)效應(yīng)越來(lái)越大。
網(wǎng)絡(luò)轉(zhuǎn)換器通過(guò)FA網(wǎng)絡(luò)實(shí)現(xiàn)電機(jī)的啟停,設(shè)置參數(shù)和運(yùn)行數(shù)據(jù),如移動(dòng)量和速度,監(jiān)控電機(jī)的定位信息,獲取報(bào)警代碼。從主機(jī) PLC 的角度來(lái)看,電機(jī)和驅(qū)動(dòng)器似乎直接連接到 FA 網(wǎng)絡(luò),因此無(wú)需識(shí)別位于網(wǎng)絡(luò)轉(zhuǎn)換器下方的 RS-485 通信控制。此外,電機(jī)的啟動(dòng)和停止控制與 I/O 控制一樣,因此 PLC 編程可以保持非常簡(jiǎn)單。
5.網(wǎng)絡(luò)轉(zhuǎn)換器
從主機(jī) PLC 的 FA 網(wǎng)絡(luò)(主站)的角度來(lái)看,只有一個(gè)網(wǎng)絡(luò)轉(zhuǎn)換器。由于網(wǎng)絡(luò)轉(zhuǎn)換器下可連接10臺(tái)以上的驅(qū)動(dòng)器,因此可連接電機(jī)的最大數(shù)量超過(guò)了FA網(wǎng)絡(luò)規(guī)格。因此,無(wú)需再增加主機(jī)主機(jī),從而節(jié)省成本。網(wǎng)絡(luò)轉(zhuǎn)換器是讓設(shè)備“降低整體成本”的產(chǎn)品。
5.1. 網(wǎng)絡(luò)轉(zhuǎn)換器的結(jié)構(gòu)
為了讓一個(gè)網(wǎng)絡(luò)轉(zhuǎn)換器控制多個(gè)電機(jī),網(wǎng)絡(luò)轉(zhuǎn)換器確保內(nèi)存范圍(參見(jiàn)圖 16)。
內(nèi)存范圍主要由兩組組成;一個(gè)是用于電機(jī)控制的“遠(yuǎn)程I/O”,另一個(gè)是讀寫運(yùn)行數(shù)據(jù)(行程量和速度)和參數(shù)的“遠(yuǎn)程寄存器”。遠(yuǎn)程 I/O 在網(wǎng)絡(luò)轉(zhuǎn)換器下具有驅(qū)動(dòng)程序的所有 I/O 信息。其目的是通過(guò)使用遠(yuǎn)程 I/O 同時(shí)控制多個(gè)電機(jī)來(lái)降低整體系統(tǒng)成本,而無(wú)需增加主控設(shè)備的數(shù)量。
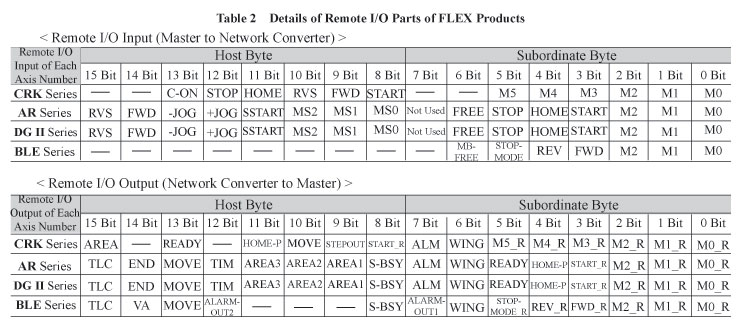
如表 2 所示,遠(yuǎn)程 I/O 在電機(jī)的啟動(dòng)和停止中起著核心作用,這個(gè)概念是從具有簡(jiǎn)單的 I/O 開(kāi)/關(guān)信號(hào)的網(wǎng)絡(luò)繼承而來(lái)的,可以輕松地控制電機(jī)。網(wǎng)絡(luò)轉(zhuǎn)換器執(zhí)行 RS-485 通信,同時(shí)從最小的軸號(hào)開(kāi)始向驅(qū)動(dòng)器分配信號(hào),并按每個(gè)驅(qū)動(dòng)器的固定間隔按升序(這稱為輪詢)。按照編號(hào)(1)到(12)對(duì)應(yīng)的順序進(jìn)行通信(如圖16所示)。
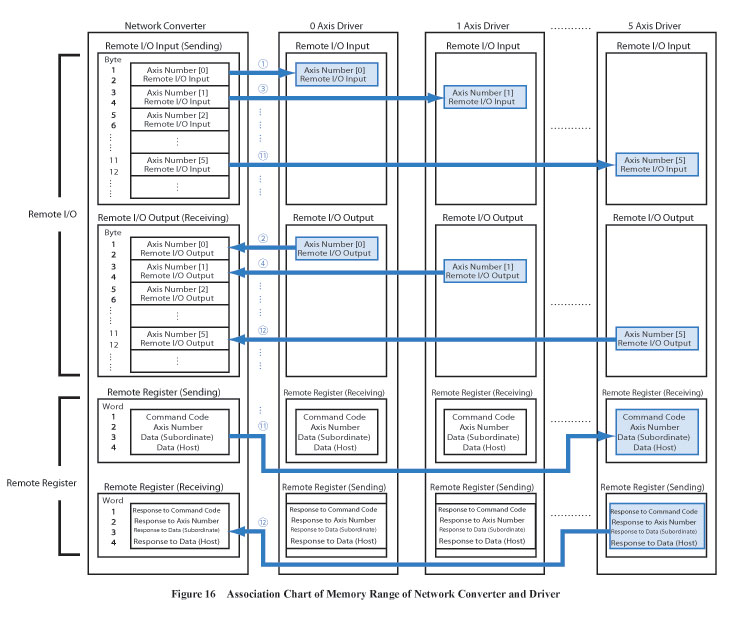
因?yàn)檩喸兪窃谒序?qū)動(dòng)器上完成的,所以涉及電機(jī)控制的遠(yuǎn)程 I/O 始終具有最新信息。另一方面,讀取和寫入數(shù)據(jù)的遠(yuǎn)程寄存器采用了只訪問(wèn)指定軸號(hào)的方法。圖16是遠(yuǎn)程寄存器只訪問(wèn)5軸驅(qū)動(dòng)器的例子(參考圖16中的(11)和(12))。
5.2. 網(wǎng)絡(luò)轉(zhuǎn)換器的通信延時(shí)
由于網(wǎng)絡(luò)轉(zhuǎn)換器以每個(gè)驅(qū)動(dòng)器的恒定頻率(1ms 周期)與驅(qū)動(dòng)器進(jìn)行通信,因此連接的驅(qū)動(dòng)器數(shù)量越多,RS-485 通信時(shí)間延遲就越長(zhǎng)。
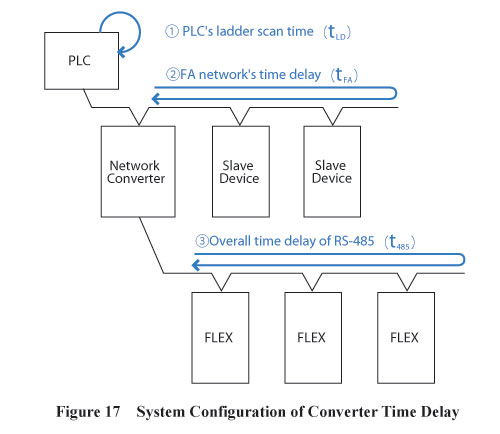
如圖 17 所示,通信延遲主要分為三個(gè)因素;(1) PLC 的梯形掃描時(shí)間 (tLD), (2) FA 網(wǎng)絡(luò)的時(shí)間延遲 (tFA),以及 (3) RS-485 的總時(shí)間延遲 (t485)。
整個(gè)系統(tǒng)的時(shí)間延遲 (tio) 可通過(guò)以下公式獲得。整個(gè)系統(tǒng)的延遲表示通過(guò)遠(yuǎn)程 I/O 的啟動(dòng)時(shí)間延遲。例如,它是從上位主機(jī)發(fā)出的 START 信號(hào)打開(kāi)到電機(jī)開(kāi)始移動(dòng)的時(shí)間延遲。

關(guān)于 (3) RS-485 的總時(shí)間延遲,它會(huì)隨著連接的驅(qū)動(dòng)器數(shù)量的增加而變大,因?yàn)槊總€(gè)驅(qū)動(dòng)器的輪詢周期約為 1 毫秒。另外,因?yàn)椋?)和(3)都是異步通信,所以(3)的RS-485通信周期最多需要2個(gè)周期。因此,③RS-485的總延時(shí)由式(2)得到。
因此,整個(gè)系統(tǒng)的時(shí)間延遲由等式(1)和(2)獲得,即(3)。

使用公式(3),以下示例說(shuō)明使用 CC-Link 轉(zhuǎn)換器的情況:假設(shè)只有一個(gè)網(wǎng)絡(luò)轉(zhuǎn)換器連接到 CC-Link 通信線路,并且 (2) FA 網(wǎng)絡(luò)的時(shí)間延遲(CC-Link 通信的時(shí)間延遲)約為 4ms 往返,而 tLD(PLC 的梯形圖掃描時(shí)間)為 1ms。圖 18 顯示了公式(3)的計(jì)算結(jié)果。
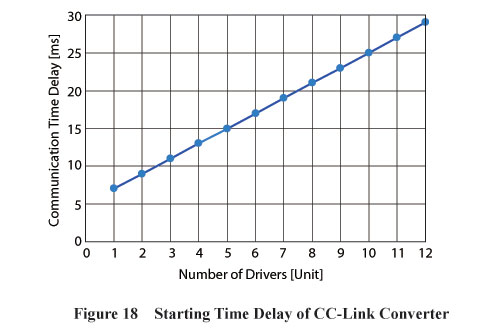
根據(jù)圖 18,當(dāng)連接的 12 臺(tái) PLC 的啟動(dòng)信號(hào)同時(shí)打開(kāi)時(shí),大約 30 毫秒后電機(jī)開(kāi)始移動(dòng)。需要注意的是,從上位PLC發(fā)送到變頻器接收的啟動(dòng)信號(hào)是通過(guò)RS-485通訊分配的。因此,12 臺(tái)電機(jī)按照軸號(hào)從低到高的順序開(kāi)始運(yùn)行,延遲最少為 1ms(最多可以延遲 2 個(gè)周期)。
由于所有軸都有遠(yuǎn)程I/O,啟動(dòng)電機(jī)時(shí)的電機(jī)控制可由公式(3)得到。
但是,由于移動(dòng)量變更等的數(shù)據(jù)傳送用的遠(yuǎn)程寄存器1個(gè)單位,所以為了改寫多個(gè)驅(qū)動(dòng)器的移動(dòng)量,需要傳送連接的多個(gè)驅(qū)動(dòng)器的數(shù)據(jù)。
以下概念解釋了數(shù)據(jù)傳輸時(shí)發(fā)生的數(shù)據(jù)傳輸時(shí)間延遲:
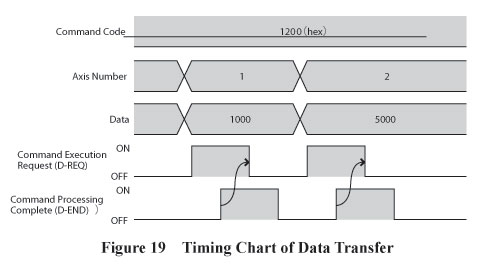
對(duì)于移動(dòng)量變更等數(shù)據(jù)傳送,在遠(yuǎn)程寄存器中設(shè)置命令代碼、軸編號(hào)和數(shù)據(jù)后,命令執(zhí)行請(qǐng)求 (D-REQ) 變?yōu)?ON 以開(kāi)始執(zhí)行。
數(shù)據(jù)傳輸按單位更改,因此在更改下一個(gè)單位的數(shù)據(jù)之前必須關(guān)閉命令執(zhí)行請(qǐng)求 (D-REQ)。通過(guò) PLC 編程關(guān)閉命令執(zhí)行請(qǐng)求 (D-REQ),同時(shí)確保打開(kāi)命令處理完成 (D-END)(參見(jiàn)圖 19)。
因此,為了傳輸單個(gè)數(shù)據(jù),需要打開(kāi)和關(guān)閉命令執(zhí)行請(qǐng)求(D-REQ)。相應(yīng)地,數(shù)據(jù)傳輸時(shí)間延遲可以通過(guò)公式(4)獲得。
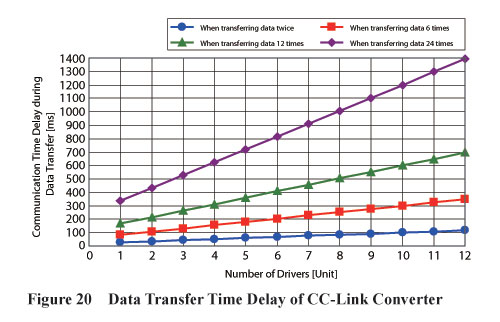
根據(jù)圖 20,如果每個(gè)驅(qū)動(dòng)器連接 6 個(gè)單元,例如,重寫行駛量和速度時(shí)數(shù)據(jù)傳輸時(shí)間延遲約為 400ms(數(shù)據(jù)傳輸總數(shù)為 12 次)。
6.總結(jié)
FLEX工業(yè)網(wǎng)絡(luò)通信的使用有助于整體設(shè)備的“成本降低”和“設(shè)備啟動(dòng)時(shí)間的縮短”。此外,F(xiàn)LEX兼容常用的控制方法,因此可以根據(jù)用戶的需要自由選擇合適的控制方法。換句話說(shuō),它可以靈活地連接設(shè)備而不受主機(jī)系統(tǒng)的束縛,從而增加了設(shè)備設(shè)計(jì)的選擇范圍。在FLEX產(chǎn)品線中,步進(jìn)電機(jī)、線性執(zhí)行器、空心旋轉(zhuǎn)執(zhí)行器和無(wú)刷直流電機(jī)可供選擇,這些電機(jī)可以在相同的連接條件下“連接”。為了進(jìn)一步兼容多樣化的FA網(wǎng)絡(luò),東方馬達(dá)將繼續(xù)擴(kuò)大網(wǎng)絡(luò)轉(zhuǎn)換器產(chǎn)品線以及FLEX產(chǎn)品線
審核編輯:湯梓紅
-
轉(zhuǎn)換器
+關(guān)注
關(guān)注
27文章
8639瀏覽量
146894 -
工業(yè)網(wǎng)絡(luò)
+關(guān)注
關(guān)注
0文章
90瀏覽量
16351 -
網(wǎng)絡(luò)通信
+關(guān)注
關(guān)注
4文章
793瀏覽量
29761 -
FLEX
+關(guān)注
關(guān)注
0文章
46瀏覽量
15200
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
智能電網(wǎng)的網(wǎng)絡(luò)通信架構(gòu)及關(guān)鍵技術(shù)解析
新概念干線微波優(yōu)勢(shì)介紹
基于UDP協(xié)議的網(wǎng)絡(luò)通信應(yīng)用程序
USB基本概念及從機(jī)編程方法介紹
什么是汽車的網(wǎng)絡(luò)通信系統(tǒng)
什么是網(wǎng)絡(luò)通信優(yōu)先級(jí)
工業(yè)網(wǎng)絡(luò)通信技術(shù)
網(wǎng)絡(luò)通信過(guò)程
網(wǎng)絡(luò)通信平臺(tái)的內(nèi)存使用
基于RF射頻知識(shí)基本概念及DTD無(wú)線產(chǎn)品介紹






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論