 AGV類型及導航形式為您提供詳盡解讀
AGV類型及導航形式為您提供詳盡解讀

AGV是什么?
AGV 是(Automated Guided Vehicle)的縮寫,為自動導引運輸車,是指裝備有電磁或光學等自動導引裝置,能夠沿規定的導引路徑行駛,具有安全保護以及各種移載功能的運輸車。它是一種輪式機器人。
AMR 是什么?
AMR是(Autonomous Mobile Robot)的縮寫,也是自主移動機器人,不同于AGV的是,AMR可以通過自身的傳感器等元器件感知周圍環境并做出相應決策,譬如自動避障,安全繞行,選取最佳路徑。同樣也屬于輪式機器人。通常其多采用激光導航或視覺及混合導航形式。
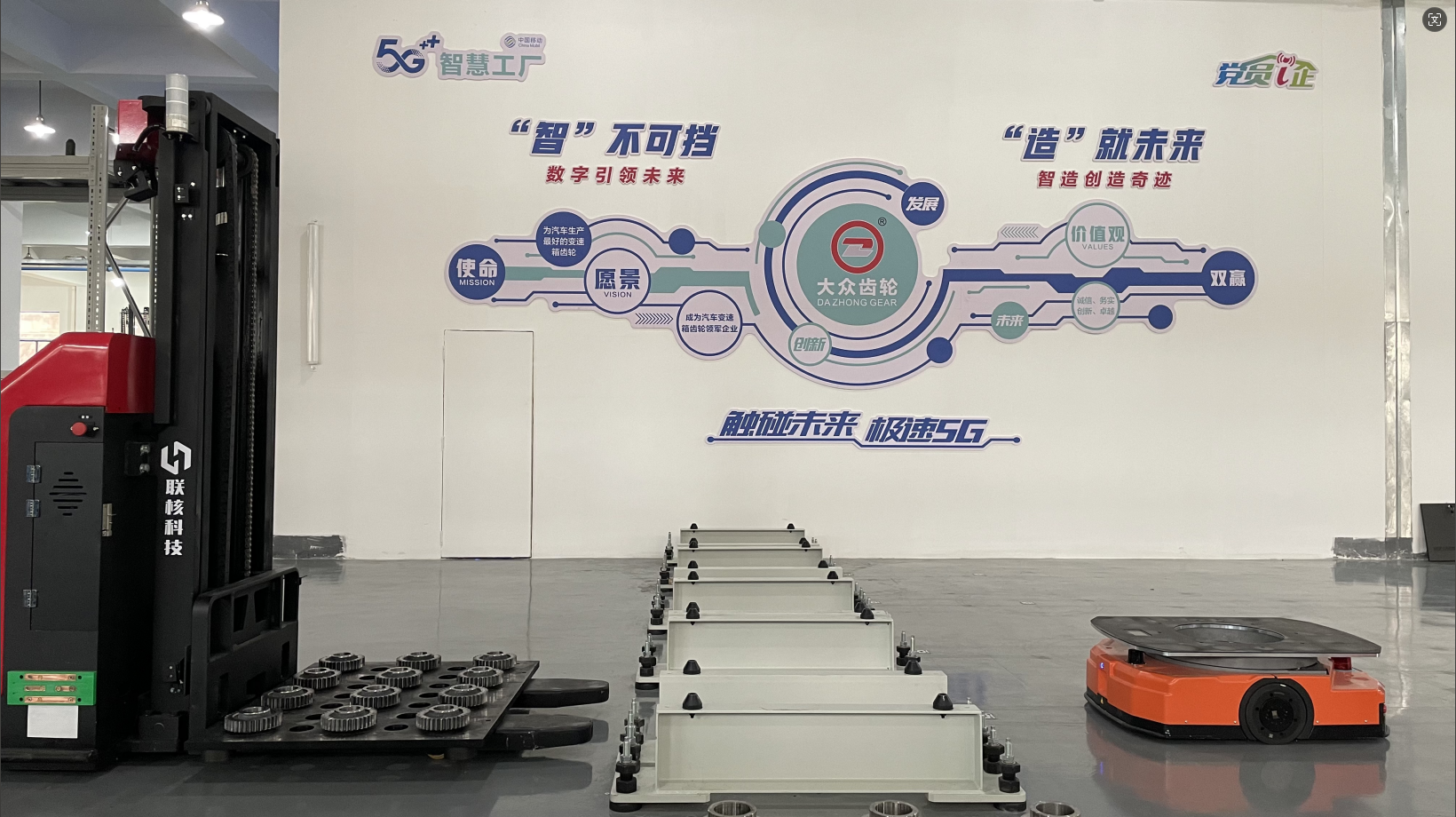
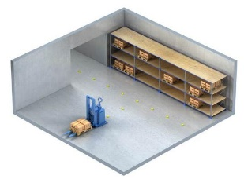
AGV應用場景圖
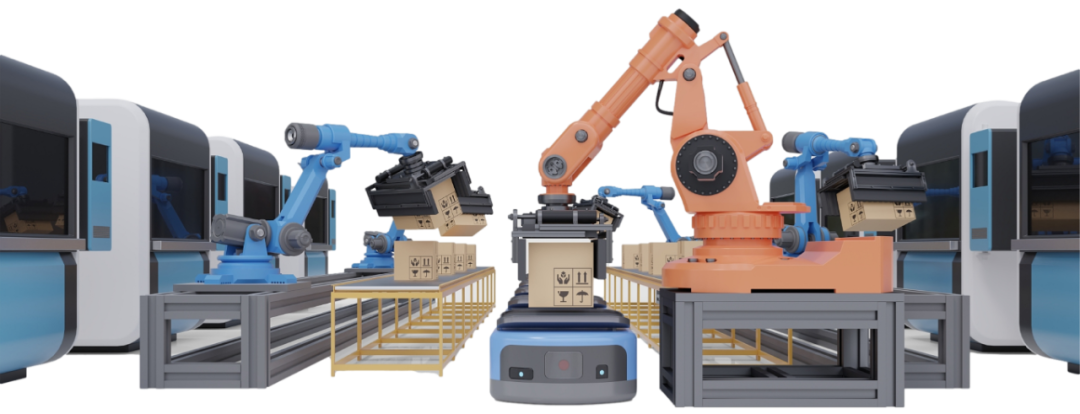

搬運型AGV是將傳統各類搬運裝卸工具實現電驅動化和自動化,實現無人/智能搬運裝卸,主要用來自動化搬運裝卸各類物料。
搬運型AGV主要由AGV車體、移載裝置及控制裝置等部分組成。
搬運型AGV的車型形式很多,通常有潛伏牽引式(單向、雙向、全向)、尾部牽引式、背負承載式(平板式、剪刀叉舉升式、托盤舉升式、整體舉升式)、輸送承載式(單層輸送式、單層舉升輸送式、單層多維輸送式、多層輸送式)、叉舉承載式(叉車式、叉舉式、卷料叉舉式、叉車)等。
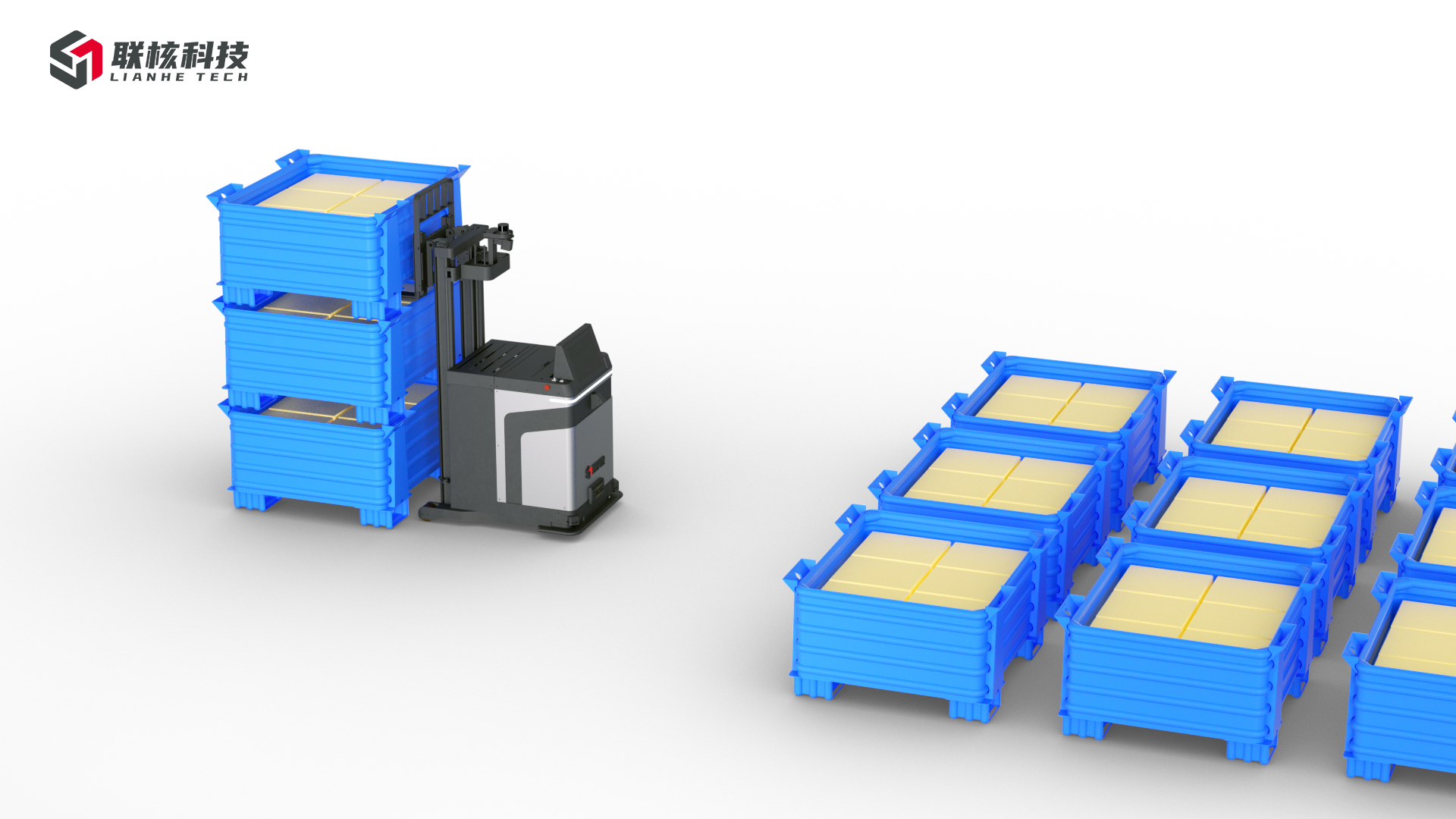
裝配型AGV與搬運型AGV區別在哪?
裝配型AGV與搬運型AGV區別在于功能的復雜化,能處理裝貨、卸載等復雜的動作,再進行物品搬運。典型的裝配型AGV有機械手AGV、滾筒AGV、叉車式AGV、升降平臺式AGV等。這些AGV類型都對基礎車體進行了改良,增加一些功能,從而實現一系列復雜動作。
裝配型AGV的優勢:
裝配型AGV的自動化程度比搬運型更高,可完全解放勞動力,實現搬運、裝卸功能一體化。站點之間AGV進行搬運,每到一個站點停靠都可進行貨物的裝貨和卸載。可與生產流水線、錕道等生產系統對接,把錕道、生產線上完成的物品裝配到AGV上再進行轉移運送。裝配型AGV一般屬于重載式AGV,因此車體設計通常比較大,適用于汽車等大型產品的移載運送。
磁條導航是一項非常成熟的技術,主要通過測量路徑上的磁場信號來獲取車輛自身相對于目標跟蹤路徑之間的位置偏差,從而實現車輛的控制及導航。磁條導航具有很高的測量精度及良好的重復性,磁導航不易受光線變化等的影響,在運行過程中,磁傳感系統具有很高的可靠性和魯棒性。磁條一旦鋪設好后,維護費用非常低,使用壽命長,且增設、變更路徑較容易。磁條需要預先部署規劃路徑且易被破損,易吸引金屬物質導致AGV設備故障。
在線路上離散鋪設QR二維碼,通過AGV車載攝像頭掃描解析二維碼獲取實時坐標。二維碼導引方式也是目前市面上最常見的AGV導引方式,二維碼導引+慣性導航的復合導航形式也被廣泛應用,亞馬遜的KIVA機器人就是通過這種導航方式實現自主移動的。這種方式相對靈活,鋪設和改變路徑也比較方便,缺點是二維碼易磨損,需定期維護。
慣性導航是在AGV上安裝陀螺儀,利用陀螺儀可以獲取AGV的三軸角速度和加速度,通過積分運算對AGV進行導航定位,慣性導航優點是成本低,短時間內精度高,但這種導航方式缺點也特別明顯,陀螺儀本身隨著時間增長,誤差會累積增大,直到丟失位置,堪稱是“絕對硬傷”。使得慣性導航通常作為其他導航方式的輔助。
磁釘導航是通過磁導航傳感器檢測磁釘的磁信號來尋找行進路徑,只是將原來采用磁條導航時對磁條進行連續感應變成間歇性感應,因此磁釘之間的距離不能夠過大,且兩磁釘間AGV處于一種距離計量的狀態,在該狀態下需要編碼器計量所行走的距離。其次,磁釘導航所用控制模塊與磁條導航控制模塊相同。對環境要求低,一般配合慣導控制,但施工成本高,挖孔預埋,靈活性差,后期變更成本高。
通過在AGV行駛路徑的周圍安裝激光反射板,AGV通過發射激光束,同時采集由反射板反射的激光束,來確定其當前的位置和方向,并通過連續的三角幾何運算來實現AGV的導航。
目前激光導航技術已經成為國內外AGV廠商的主流方案,由于其定位精度高、線路變更靈活、導航技術成熟等等因素導致激光導航已經普及。激光導航需要提前按照一定要求鋪設反射板,成本較高,適用于周邊無遮擋的作業環境。
電磁導航是較為傳統的導航方式之一,目前仍被采用,它是在AGV的行駛路徑上埋設金屬線,并在金屬線加載導引頻率,通過對導引頻率的識別來實現AGV的導航功能。該導航技術類似于磁條導航,由于該導航技術美性不足、路徑變更困難等缺點,該技術方案逐漸被AGV廠商放棄,但是特定地場合也比較適合該導航技術,具體根據AGV工作環境要求。比如高溫環境下、線路平直性要求嚴格等要求。
輪廓導航是目前AGV最為先進的導航技術,該技術利用二維激光掃描儀對現場環境進行測量、學習,并繪制導航環境,然后進行多少測量學習,修正地圖進而實現輪廓導航功能。利用自然環境(墻壁、柱子以及其它固定物體)進行自由測距導航根據環境測量結果更新位置。輪廓導航算法更復雜,成本較高,調度方面較為復雜,增加系統冗余。
視覺導航也是基于SLAM算法的一種導航方式,這種導航方式是通過車載視覺攝像頭采集運行區域的圖像信息,通過圖像信息的處理來進行定位和導航。視覺導航具有高靈活性,適用范圍廣和成本低等優點,但是目前技術還不夠成熟,識別地面紋理信息較長。利用視覺系統快速準確地實現路標識別這一技術仍處于瓶頸階段。
色帶導航通過視覺傳感器(或組合式的色標傳感器),檢測事先鋪設在地面的色帶與AGV的相對位置,從而使小車沿既定路線(色帶)行駛。
熒光導航的路線是以熒光顏料制作的色帶。熒光導航傳感器發射經調制的紫外光,熒光色帶上的熒光物質會被紫外光激發,發射出波長在可見光光譜范圍內(約420 nm 到750 nm)的可見光。熒光導航傳感器會接收此光線,從而測量判斷色帶與AGV的相對位置,從而使小車沿既定路線行駛。
鋪設容易改路徑,成本低,易被污染,環境要求高,地面平整性要求高。
測距導航是利用激光二位掃描儀對其周圍環境進行掃描測量,獲取測量數據然后結合導航算法實現AGV導航。該導航傳感通常使用具有安全功能的安全激光掃描儀實現,由于采用安全激光掃描儀可以實現安全功能的同時也能夠實現導航測量功能。采用測距導航技術的AGV可以實現進入集裝箱內部進行自動取貨送貨功能。
自然導航也稱為SLAM激光導航,是一種無需使用反射板的自然導航方式,它不再需要通過輔助導航標志(二維碼、反射板等),而是通過工作場景中的自然環境,如:倉庫中的柱子、墻面、貨架等作為定位參照物以實現定位導航。相比于傳統的激光導航,它的優勢是制造成本較低。
混合導航是多種導航的集合體,該導航方式是根據現場環境的變化應運而生的。由于現場環境的變化導致某種導航暫時無法滿足要求,進而切換到另一種導航方式繼續滿足AGV連續運行。

蘇州鳳凰動力工業有限公司(簡稱:鳳凰動力)是國內較早從事專業AGV/AMR舵輪、電驅動輪總成研發與生產的企業,主要產品包括臥式驅動輪、臥式舵輪、立式驅動輪、立式舵輪、重載AGV曲軸腳輪、高精密型腳輪萬向輪。電驅動輪及舵輪功率范圍0.2KW~50KW、輪徑范圍150mm~600mm、單只載重范圍300KG~20000KG,幾乎涵蓋了工業領域各類電驅動移動設備的需求,客戶選型游刃有余,并且還可以滿足客戶個性化的定制需求,為客戶打造專屬化產品。
自創立以來,鳳凰動力已經為超過1800家客戶提供了完整的電驅動解決方案,涉及軍工、航運碼頭、機場、建筑、鋼鐵、汽車、工業車輛、紡織、機械制造、電子制造等多個行業。取得各種專利40多項,建立起電機、齒輪、驅動控制系統等核心零部件優秀的供應鏈基礎,完成了標準化、模塊化、定制化、集成化、系統化、智能化初步架構,為提供優質的OEM、ODM整體解決方案打下了堅實的基礎。
審核編輯黃宇
-
激光
+關注
關注
19文章
3131瀏覽量
64375 -
AGV
+關注
關注
27文章
1284瀏覽量
41019
發布評論請先 登錄
相關推薦
AGV激光導航定位技術綜述與發展趨勢

TomTom為依維柯商用車提供增強的導航
如何選擇讓自己滿意(適合)的agv小車?純干貨分享
AGV激光導航定位技術與構建地圖

智能呼叫、激光導航、自動避障,為什么AGV機器人被需要?

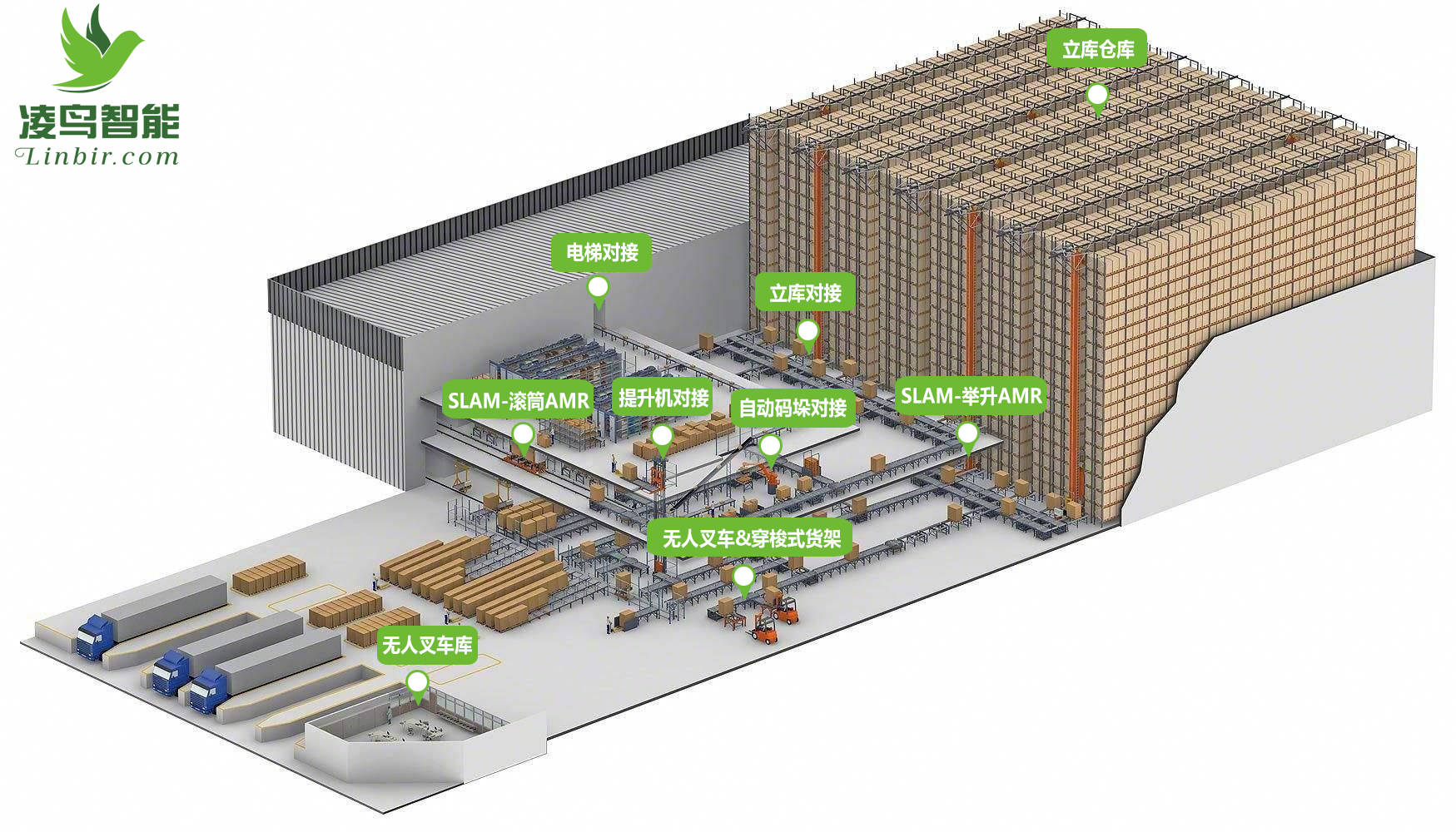
解讀 AGV 關鍵連接對物流自動化發展的意義

Agv無人叉車常見的5種導航方式大盤點!優缺點分析 哪種更適合你?
神經網絡結構類型和應用實例
Agv叉車由什么構成?工作原理是什么?易損件有哪些?

AGV小車上的慣性導航模塊運用——SGPM02

激光,磁性,視覺?什么是AGV最好的導航系統?
更智能更柔性化,AGV導航方式的創新與演進!







 工商網監
工商網監
評論