") 小型平行履帶底盤(pán)實(shí)現(xiàn)超聲避障功能
小型平行履帶底盤(pán)實(shí)現(xiàn)超聲避障功能
1. 功能說(shuō)明
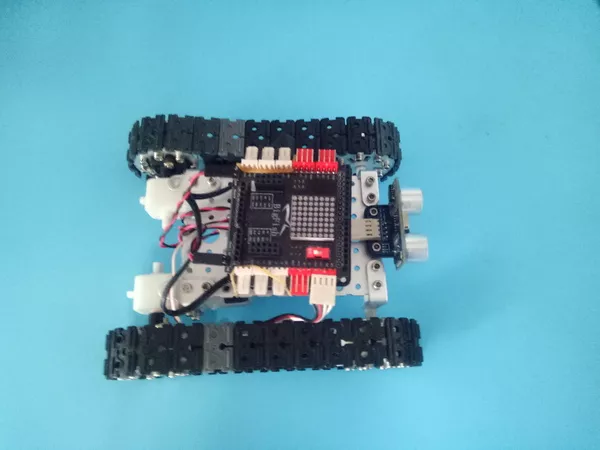
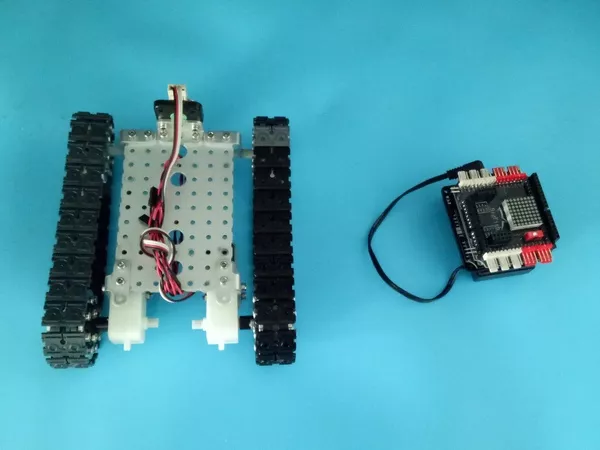
本實(shí)驗(yàn)使用的樣機(jī)為R026a樣機(jī)小型平行履帶底盤(pán)。在樣機(jī)前方安裝1個(gè) 超聲波傳感器,如果遇到障礙,機(jī)器人后退、轉(zhuǎn)向,否則機(jī)器人前進(jìn),實(shí)現(xiàn)機(jī)器人避障的效果。
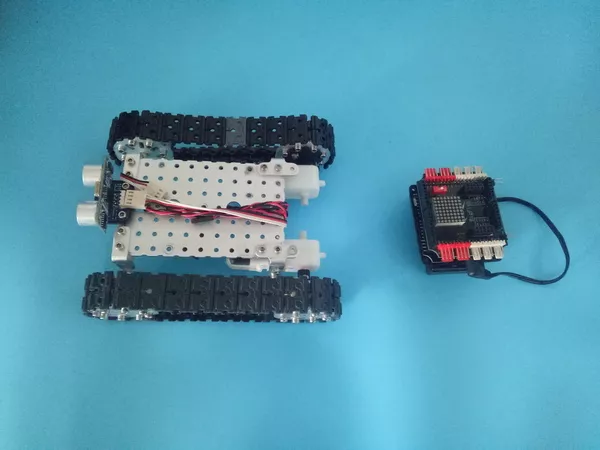
在這個(gè)示例中,我們采用了以下硬件,請(qǐng)大家參考:
| 主控板 | Basra(兼容Arduino Uno) |
| 擴(kuò)展版 | Bigfish2.1 |
| 傳感器 | 超聲波傳感器 |
兩個(gè)直流電機(jī)連在D5,D6以及D9,D10接口上;超聲波傳感器連在A(yíng)4接口上。
3. 示例程序
編程環(huán)境:Arduino 1.8.19
編寫(xiě)并燒錄以下程序(text.ino),該程序?qū)?shí)現(xiàn)超聲避障的動(dòng)作
/*------------------------------------------------------------------------------------ 版權(quán)說(shuō)明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved. Distributed under MIT license.See file LICENSE for detail or copy at by 機(jī)器譜 2023-02-10 ------------------------------------------------------------------------------------*/ int _ABVAR_1_i = 0 ; int ardublockUltrasonicSensorCodeAutoGeneratedReturnCM(int trigPin, int echoPin) { long duration; pinMode(trigPin, OUTPUT); pinMode(echoPin, INPUT); digitalWrite(trigPin, LOW); delayMicroseconds(2); digitalWrite(trigPin, HIGH); delayMicroseconds(20); digitalWrite(trigPin, LOW); duration = pulseIn(echoPin, HIGH); duration = duration / 59; if ((duration < 2) || (duration > 300)) return false; return duration; } void turnLeft(); void forward(); void back(); void setup() { pinMode( 10, OUTPUT); pinMode( 6, OUTPUT); pinMode( 5, OUTPUT); pinMode( 9, OUTPUT); digitalWrite( 19 , LOW ); } void loop() { _ABVAR_1_i = ardublockUltrasonicSensorCodeAutoGeneratedReturnCM( 19 , 18 ) ; if (( ( ( _ABVAR_1_i ) <= ( 5 ) ) && ( ( _ABVAR_1_i ) > ( 0 ) ) )) { back(); delay( 1000 ); turnLeft(); delay( 1500 ); } else { forward(); } } void forward() { analogWrite(5 , 0); analogWrite(6 , 165); analogWrite(9 , 0); analogWrite(10 , 165); } void back() { analogWrite(5 , 165); analogWrite(6 , 0); analogWrite(9 , 165); analogWrite(10 , 0); } void turnLeft() { analogWrite(5 , 165); analogWrite(6 , 0); analogWrite(9 , 0); analogWrite(10 , 165); }審核編輯黃宇
聲明:本文內(nèi)容及配圖由入駐作者撰寫(xiě)或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀(guān)點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問(wèn)題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
傳感器
+關(guān)注
關(guān)注
2548文章
50698瀏覽量
752071 -
機(jī)器人
+關(guān)注
關(guān)注
210文章
28212瀏覽量
206568
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
小型平行履帶底盤(pán)的制作分享
小型平行履帶底盤(pán)可以通過(guò)兩側(cè)履帶的 差速運(yùn)動(dòng) 來(lái)實(shí)現(xiàn)前進(jìn)、后退、原地轉(zhuǎn)向、大半徑轉(zhuǎn)向等基本行駛
請(qǐng)問(wèn)STM32 Cube MX怎么實(shí)現(xiàn)超聲波避障工程?
請(qǐng)問(wèn)STM32 Cube MX怎么實(shí)現(xiàn)超聲波避障工程?
發(fā)表于 09-26 08:42
如何使用STC89C53單片機(jī)實(shí)現(xiàn)帶全向輪的兩輪驅(qū)動(dòng)避障小車(chē)的設(shè)計(jì)?
如何利用超聲波實(shí)現(xiàn)小車(chē)的避障功能?如何利用紅外傳感器實(shí)現(xiàn)避
發(fā)表于 10-12 07:26
如何實(shí)現(xiàn)舵機(jī)+超聲波避障小車(chē)藍(lán)牙遙控
如何實(shí)現(xiàn)舵機(jī)+超聲波避障小車(chē)藍(lán)牙遙控
發(fā)表于 10-13 07:51
一臺(tái)能實(shí)現(xiàn)避障功能小車(chē)的設(shè)計(jì)資料分享
使用51單片機(jī)+超聲波傳感器來(lái)設(shè)計(jì)一臺(tái)能實(shí)現(xiàn)避障功能的小車(chē),使小車(chē)對(duì)其運(yùn)動(dòng)方向受到的阻礙作出各種躲避障礙的動(dòng)作。
發(fā)表于 11-18 06:01
如何去實(shí)現(xiàn)一種基于超聲波測(cè)距模塊的避障智能小車(chē)呢
HC-SR04超聲波測(cè)距模塊的工作原理是什么?如何去實(shí)現(xiàn)一種基于超聲波測(cè)距模塊的避障智能小車(chē)呢?
發(fā)表于 11-26 07:09
如何去實(shí)現(xiàn)一種基于STM32的超聲波避障小車(chē)代碼呢
如何去實(shí)現(xiàn)一種基于STM32的超聲波避障小車(chē)代碼呢?超聲波避
發(fā)表于 11-26 06:52
怎樣去設(shè)計(jì)一個(gè)基于STM32的超聲波避障小車(chē)
超聲波避障小車(chē)原理就是通過(guò)給超聲波模塊超過(guò)10us的高電平信號(hào),自動(dòng)發(fā)送8個(gè)40KHZ的方波,來(lái)檢測(cè)是不是有信號(hào)的返回,如果有信號(hào)的返回,那么就判斷為前方有障礙物,并且通過(guò)舵機(jī)云臺(tái),來(lái)
發(fā)表于 01-05 06:01
基于超聲波傳感器的AGV避障模塊設(shè)計(jì)與實(shí)現(xiàn)
提示功能、CAN總線(xiàn)技術(shù),針對(duì)包含多個(gè)超聲波傳感器的AGV避障模塊進(jìn)行硬件和軟件上的開(kāi)發(fā)。CAN總線(xiàn)技術(shù)的應(yīng)用使AGV避
發(fā)表于 12-08 11:37
?42次下載
基于51單片機(jī)的小車(chē)避障電路實(shí)現(xiàn)
介紹模型小車(chē)自適應(yīng)行駛和避障的一個(gè)實(shí)例,通過(guò)超聲波傳感器感知車(chē)輛行駛
環(huán)境,實(shí)現(xiàn)小車(chē)的自適應(yīng)巡航、避障
發(fā)表于 03-24 16:50
?32次下載
基于多超聲波信息融合的小車(chē)避障算法實(shí)現(xiàn)_劉崇翔
基于多超聲波信息融合的小車(chē)避障算法實(shí)現(xiàn)_劉崇翔
發(fā)表于 03-17 16:04
?13次下載
小型雙節(jié)履帶底盤(pán)的制作
1.運(yùn)動(dòng)功能說(shuō)明 雙節(jié)履帶車(chē)可以通過(guò)兩個(gè)驅(qū)動(dòng)輪的差速運(yùn)動(dòng)來(lái)實(shí)現(xiàn)前進(jìn)、后退、原地轉(zhuǎn)向、大半徑轉(zhuǎn)向等基本行駛功能,并可通過(guò)舵機(jī)關(guān)節(jié)模塊進(jìn)行小臂的抬起和落下。通過(guò)

小型平行履帶底盤(pán)實(shí)現(xiàn)紅外避障功能
1. 功能說(shuō)明 ? ?本實(shí)驗(yàn)使用的樣機(jī)為R026a樣機(jī)小型平行履帶底盤(pán)。在樣機(jī)前方安裝1個(gè) 近紅外傳感器 ,如果遇到障礙,機(jī)器人后退,否則機(jī)
小型平行履帶底盤(pán)實(shí)現(xiàn)雙灰度循跡功能
1. 功能說(shuō)明 ? ?在小型平行履帶底盤(pán)樣機(jī)上安裝2個(gè) 灰度傳感器 ,實(shí)現(xiàn)機(jī)器人沿指定路線(xiàn)進(jìn)行運(yùn)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論