 小型平行履帶底盤實現雙灰度循跡功能
小型平行履帶底盤實現雙灰度循跡功能
1. 功能說明
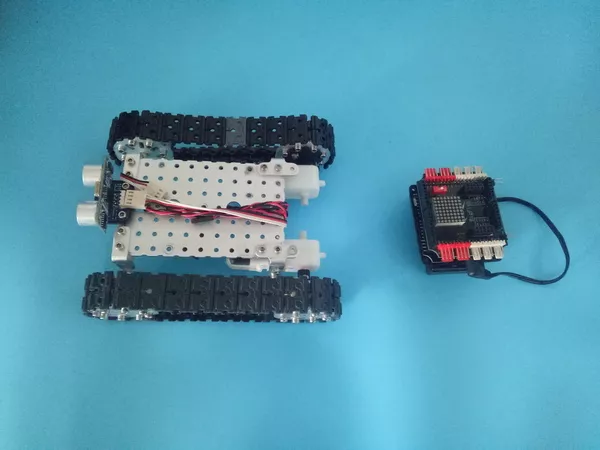
在小型平行履帶底盤樣機上安裝2個 灰度傳感器 ,實現機器人沿指定路線進行運動的效果。

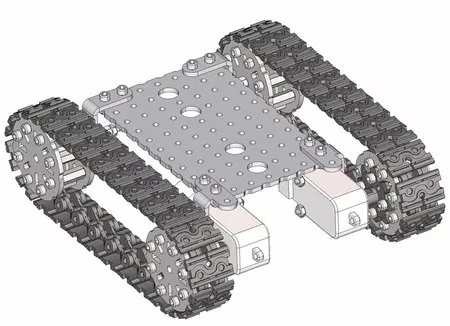
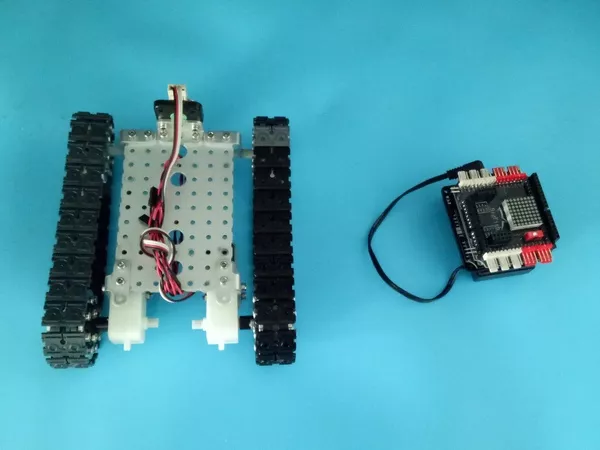
2. 使用樣機
本實驗使用的樣機為R026a樣機。
3. 功能實現
在這個示例中,我們采用了以下硬件,請大家參考:
| 主控板 | Basra(兼容Arduino Uno) |
| 擴展板 | Bigfish2.1 |
| 傳感器 | 灰度傳感器 |
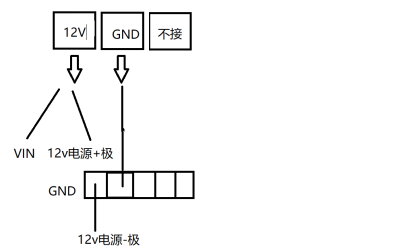
| 電池 | 7.4V鋰電池 |
3.2 編寫程序
編程環境:Arduino 1.8.19
編寫并燒錄以下程序(2gray_blackline.ino),該程序將實現演示動圖中的動作【例程源代碼資料下載詳見 https://www.robotway.com/h-col-114.html】
/*------------------------------------------------------------------------------------ 版權說明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved. Distributed under MIT license.See file LICENSE for detail or copy at https://opensource.org/licenses/MIT by 機器譜 2023-02-09 https://www.robotway.com/ ------------------------------ 實驗接線:兩個直流電機接口的針腳號分別為D5,D6以及D9,D10;灰度傳感器連在A0、A4接口上 ------------------------------------------------------------------------------------*/ int i=0; void Forward(); void Back(); void Turn_left(); void Turn_right(); void Speed_up(); void Slow_down(); void setup() { // put your setup code here, to run once: pinMode(A0,INPUT); pinMode(A4,INPUT); pinMode(9,OUTPUT); pinMode(10,OUTPUT); pinMode(5,OUTPUT); pinMode(6,OUTPUT); Serial.begin(9600); } void loop() { // put your main code here, to run repeatedly: int a=digitalRead(A0); int b=digitalRead(A4); Serial.println(a); Serial.println(b);//Here is serial monitor,you will kown in later learning if(a==0&&b==0) Forward(); if(a==1&&b==0) Turn_left(); if(a==0&&b==1) Turn_right(); } void Forward()// { analogWrite(9,120); analogWrite(10,0); analogWrite(5,120); analogWrite(6,0); delay(50); } void Back() { digitalWrite(9,LOW); digitalWrite(10,HIGH); digitalWrite(5,LOW); digitalWrite(6,HIGH); delay(4000); } void Turn_left() { digitalWrite(9,0); digitalWrite(10,0); digitalWrite(5,100); digitalWrite(6,0); delay(50); } void Turn_right() { digitalWrite(9,100); digitalWrite(10,0); digitalWrite(5,0); digitalWrite(6,0); delay(50); } void Speed_up() { for(i=0;i<=255;i+=5) { analogWrite(9,i); analogWrite(10,0); analogWrite(5,i); analogWrite(6,0); delay(50); }//speed up } void Slow_down() { for(i=255;i>=0;i-=5) { analogWrite(9,i); analogWrite(10,0); analogWrite(5,i); analogWrite(6,0); delay(50); } }
審核編輯黃宇
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
傳感器
+關注
關注
2548文章
50698瀏覽量
752073 -
機器人
+關注
關注
210文章
28212瀏覽量
206568
發布評論請先 登錄
相關推薦

履帶機器人 金屬底盤
` 本帖最后由 威凱-智控 于 2012-8-14 23:28 編輯
今天給大家分享一個全金屬的履帶機器人底盤準備最履帶機器人的朋友們,可以一起交流一下機器人瘋狂愛好者 讓思維沸騰起來 讓智慧行動起來 共同創造機器人的精彩!
發表于 08-14 23:25
履帶底盤的結構部分
寫在前面:看著網上那些履帶底盤,怎么看怎么不舒服,還是決定自己做。這樣就帶來一個很大的問題,就是很多結構件都要用3D打印。我自己有3D打印機,下面不但會給出設計,還會給出實物照片。但是,對于沒有3D
發表于 02-19 03:54
循跡智能小車是由哪些部分組成的
循跡智能小車 循黑線文章目錄循跡智能小車 循黑線硬件菜單硬件使用硬件組裝程序設計前的理解程序代碼硬件菜單單片機型號:STC16F40K1284路紅外循跡模塊小車底盤套件(一個
發表于 07-14 06:56

使用以雙灰度傳感器實現的曲線循跡以及矩形循跡的資料說明
在這次課程中,我們小組選定的課題是循跡小車,在長達數周的辛苦付出中,我組小車已能實現的功能有1.紅遙控小車2.以灰度傳感器實現矩形
發表于 12-23 08:00
?12次下載

小型雙節履帶底盤的制作
1.運動功能說明 雙節履帶車可以通過兩個驅動輪的差速運動來實現前進、后退、原地轉向、大半徑轉向等基本行駛功能,并可通過舵機關節模塊進行小臂的


小型三節履帶底盤的制作
雙節履帶車可以通過兩個驅動輪的差速運動來實現前進、后退、原地轉向、大半徑轉向等基本行駛功能,并可通過舵機關節模塊進行小臂的抬起和落下。通過底盤
如何讓小型雙輪差速底盤實現雙灰度循跡功能?
1. 功能說明 ? ?在機器人車體上安裝2個 灰度傳感器 ,實現機器人按照下圖所指定的路線進行導航運動,來模擬倉庫物流機器人按指定路線行進的工作過程。 ? 2. 使用樣機 ? ? 本實驗使用的樣機為

雙輪差速底盤三灰度循跡功能的實現
1. 功能說明 ? ? 在小型雙輪差速底盤樣機前方安裝3個 灰度傳感器 ,實現機器人沿下圖所指定的跑道路線進行運動的效果。 2. 使用樣機
小型平行履帶底盤實現紅外避障功能
1. 功能說明 ? ?本實驗使用的樣機為R026a樣機小型平行履帶底盤。在樣機前方安裝1個 近紅外傳感器 ,如果遇到障礙,機器人后退,否則機
小型平行履帶底盤實現超聲避障功能
1. 功能說明 ? ?本實驗使用的樣機為R026a樣機小型平行履帶底盤。在樣機前方安裝1個 超聲波傳感器?,如果遇到障礙,機器人后退、轉向,





 工商網監
工商網監
評論