 關于 BLV 系列更新的 3 件事
關于 BLV 系列更新的 3 件事
BLV 系列是我們提供的兩種直流輸入無刷電機速度控制系統之一。帶霍爾效應傳感器反饋的無刷電機提供恒定扭矩、寬速度范圍和速度調節,而 BLV 驅動器則提供專為移動機器人設計的獨特功能,例如低電量運行和斜坡運行。
BLV 系列無刷齒輪電機和驅動器的圖像如下所示。在右側,我們展示了帶有預組裝 FR 減速機的 BLV 減速電機,這是一種節省空間的扁平式空心軸減速機,專為高扭矩應用而設計。左側的專用電機驅動器控制電機速度和操作。顯示了端子側,其中連接了所有電線。可以配備可選的平行軸減速機或電磁制動器。
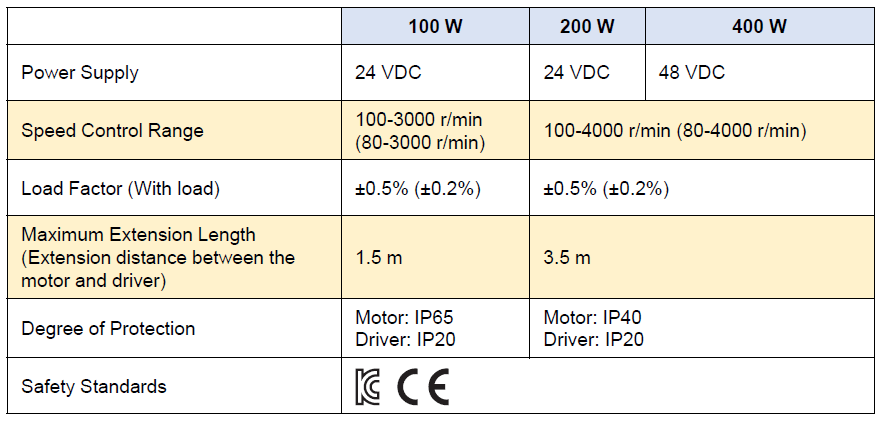
這是原始的 BLV 系列 200 W / 400 W 系列及其一些規格。
< >
| 1. 新100W型 |
| 100 W 平行軸齒輪電機 | 100 W FR 扁平空心軸齒輪電機 |
 |
|
在聽取客戶的反饋時,我們意識到 AGV/AMR/移動機器人和物料搬運行業對緊湊型 100 W 齒輪電機的需求量很大。因此,我們將 BLV 系列及其AGV 特定功能擴展到 100 W 范圍。產品陣容中新增了 100 W 型。雖然外觀保持不變,但規格略有不同。
差異
100 W 型號僅接受 24 VDC,因此不接受 48 VDC。
速度范圍較窄,為 10~3000 r/min(模擬)或 80~3000 r/min(數字)。
電機和驅動器之間的最大延伸距離降低到1.5米。
電機的 IP 等級從 IP40 提高到 IP65。
相似之處
速度調節保持在 +/-0.5%(模擬)或 +/-0.2%(數字)不變。
驅動器的 IP 等級保持在 IP20。
安全標準保持不變。
這是 100 W、200 W 和 400 W BLV 系列型號的比較表。
提供 0.2 m(0.7 英尺)或 1.0 m(3.3 英尺)兩種電纜長度。但是,100 W 型不提供圓軸無齒輪版本。
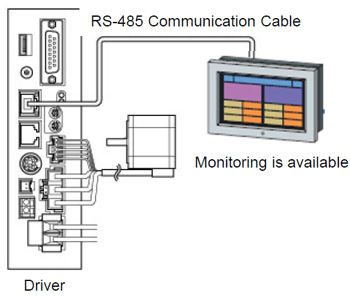
這是整體系統配置的樣子。還提供安裝支架、聯軸器和外部速度電位器等附件。
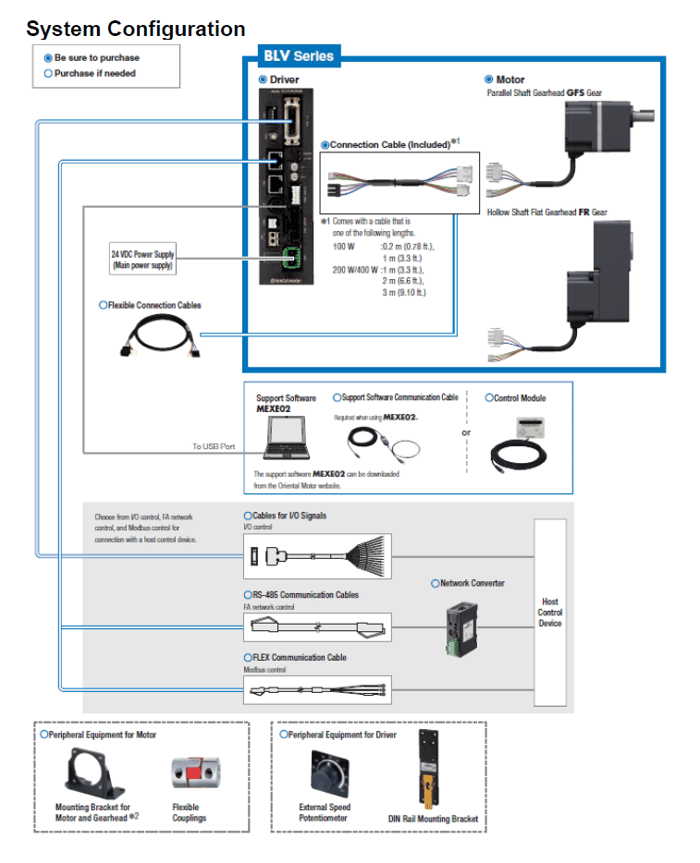
請注意,除了上圖中的 OPX-2A“控制模塊”外,MEXE02 支持軟件還顯示為一種對驅動器上存儲的數據進行編程的新方法。接下來,我們將介紹 BLV 系列的第二個主要設計變更。
| 2. 與 MEXE02 支持軟件的兼容性 |
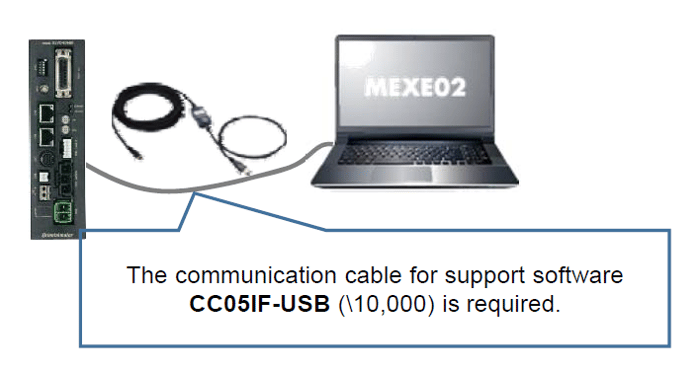
使用 MEXE02 支持軟件輕松設置數據
MEXE02 軟件提供直觀的用戶界面、簡單的點對點運動曲線編程和監控功能。原始BLV 驅動器上存儲的數據可以使用 OPX-2A 手持示教器或通過 RS-485 通過 Modbus RTU 進行編程。現在,所有功率的所有驅動程序都可以使用通用的 MEXE02 支持軟件來更輕松地進行數據設置。
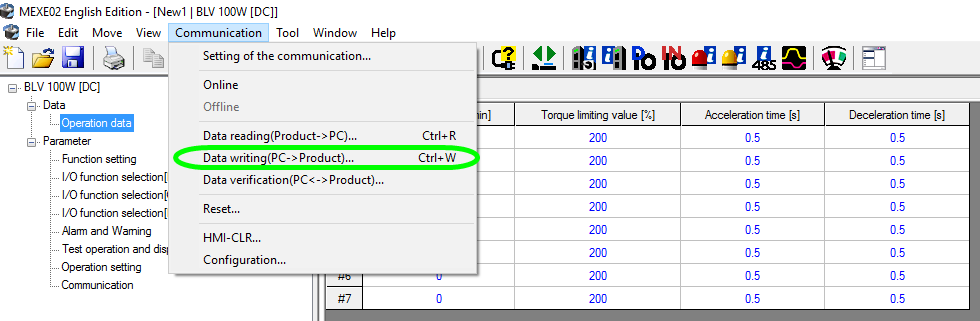
下面的屏幕截圖顯示了更新的BLV 驅動程序連接到 PC 時的 MEXE02 軟件。需要轉速[r/min]、扭矩限制值[%]、加速時間[s]和減速時間[s]。您只需輸入所需的值,或使用默認值。BLV 系列提供 8 種速度配置文件。配置文件的數量對應于產品。例如,AZ 系列步進電機驅動器提供 256 種運動曲線。
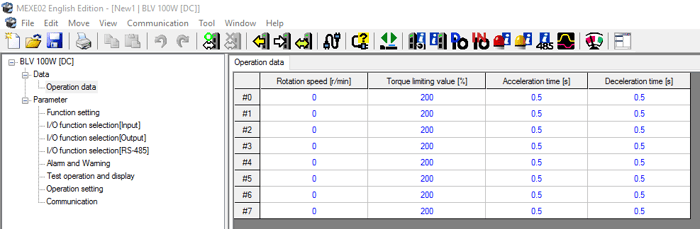
不要忘記通過執行數據寫入操作來保存數據。
除了簡單直觀的編程,MEXE02 軟件的操作示教、監控和測試功能在設置或故障排除期間非常有用。讓我們回顧一下這些功能。
示教、遠程操作
示教操作窗口允許操作員手動將電機移動到特定位置,以便將位置示教并存儲給驅動器。可以使用方向鍵移動電機,選擇要保存數據的數據號。 遠程操作允許您測試存儲在驅動器中的運動曲線,而無需連接 I/O。
下面兩張截圖沒有連接產品,所以監控的數值顯示為0。系統運行時,會有數值實時變化。在 OUTPUT 下,綠色表示輸出打開,而白色表示關閉。
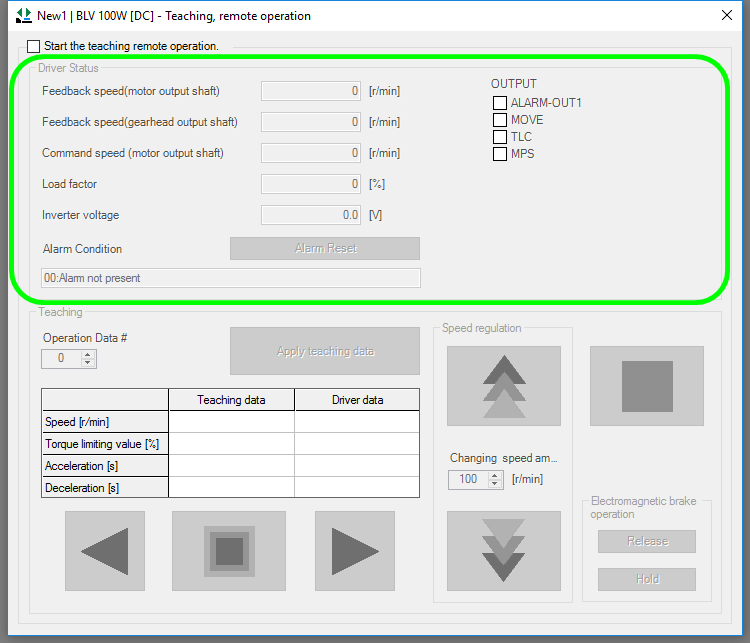
實時信息,如反饋速度(在電機和減速機輸出軸)、命令速度、負載系數、逆變器電壓和警報代碼,顯示在右上角。此處僅顯示某些輸出規約。高級 I/O 狀態檢查,請參考 I/O 測試操作。
請記住選中復選框以開始任何示教、遠程或監控操作。
監控操作 - 許多可用
您可以執行許多監視器操作來幫助進行故障排除和了解系統的工作原理。我們將在這里討論一些監視器操作。
| 監控操作包括單元信息監控、狀態監控、DI/O、RI/O監控(直接I/O和遠程I/O)、內部I/O監控、報警監控、警告監控、RS-485通信監控和波形監視器。 |
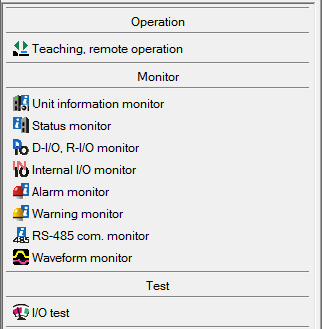 |
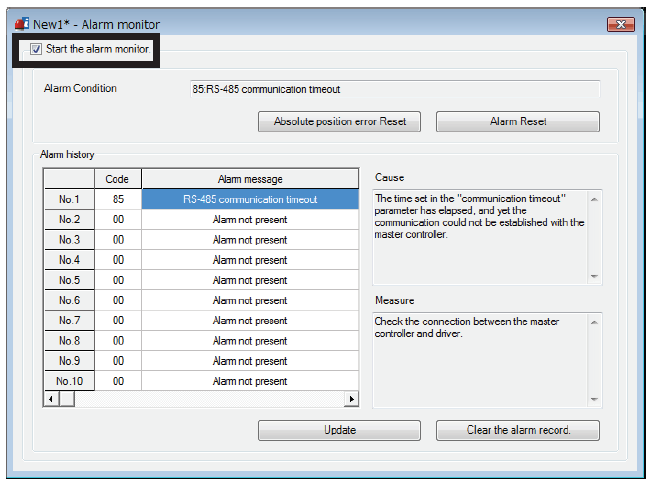
警報監視器在故障排除期間非常有用,因為它顯示了導致警報的確切警報代碼。它還保留多達 10 條報警記錄。參考“原因”和“措施”來確定如何處理。
以下屏幕截圖顯示“RS-485 通信超時”。原因是“通信超時”參數中設置的時間已過,仍未建立通信。解決方法是檢查主控制器和驅動程序之間的連接。有關詳細信息,請參閱手冊。
波形監視器在系統運行時記錄 I/O 的時序。這在故障排除期間特別有用,因為您想知道它在做什么與它應該做什么。
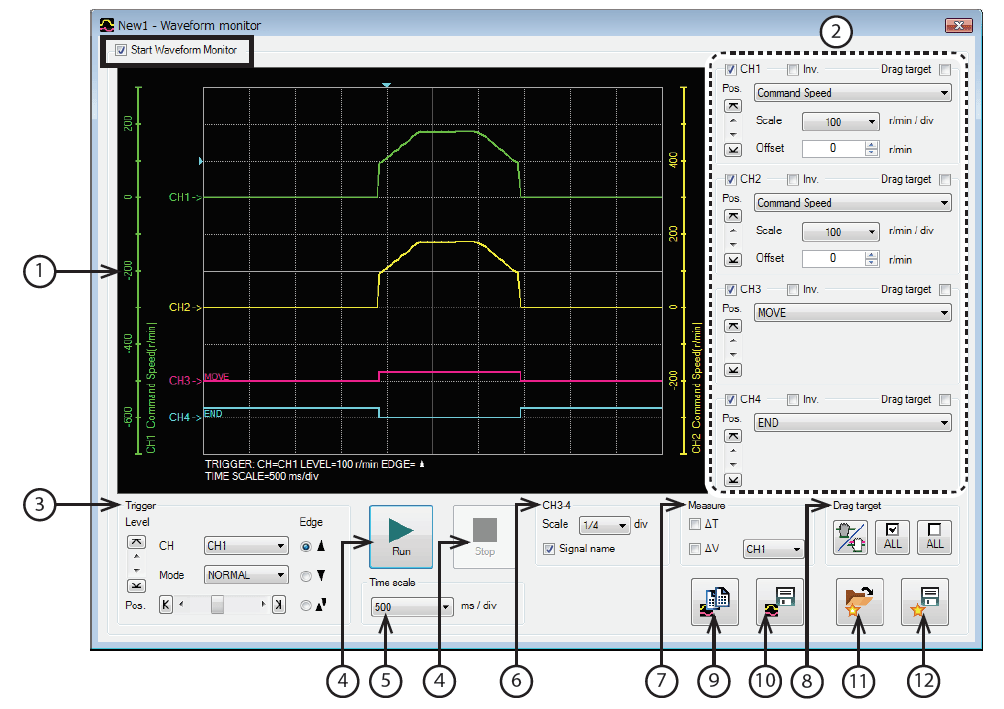
| 1個 | 測量結果繪制在該區域中。 |
| 2個 | 可以設置每個 CH 的測量條件。有關詳細信息,請參閱步驟 3。 |
| 3個 | 波形測量設置:可以指定 Pos(觸發位置)、Level、CH、Mode 和 Edge(檢測條件)。對于“CH”,只能指定那些顯示為 8 1 的 CH。 |
| 4個 | 運行:該按鈕用于開始測量。停止:該按鈕用于停止測量。 |
| 5個 | 可以設置測量時間范圍。 |
| 6個 | 可以設置 CH3 和 CH4 的顯示方式。比例:顯示尺寸可以從 1/1 (100%)、1/2 (50%) 或 1/4 (25%) 中選擇。信號名稱:信號名稱可以顯示或隱藏。 |
| 7 | 測量的度量可以顯示或隱藏。此外,還可以選擇要測量的 CH。 |
| 8個 |
可以選擇移動在窗口上繪制的波形的顯示位置的方法。有以下兩種移動方法。 ? 移動每個通道的波形。 ? 同時移動在88 2 中選擇的CH 的波形。 |
| 9 | 當前顯示的波形可以復制到剪貼板。 |
| 10 | 當前顯示的波形可以保存到外部文件中。詳情請參閱第 52 頁。 |
| 11 | 可以從“收藏夾數據”加載測量設置。詳情請參閱第 52 頁。 |
| 12 | 測量設置可以保存為“收藏夾數據”。 |
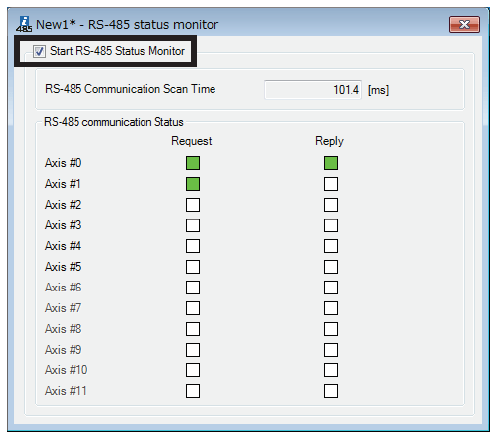
多一個。RS -485 狀態監視器檢查通信狀態。這在嘗試建立 RS-485 工業網絡時特別有用。
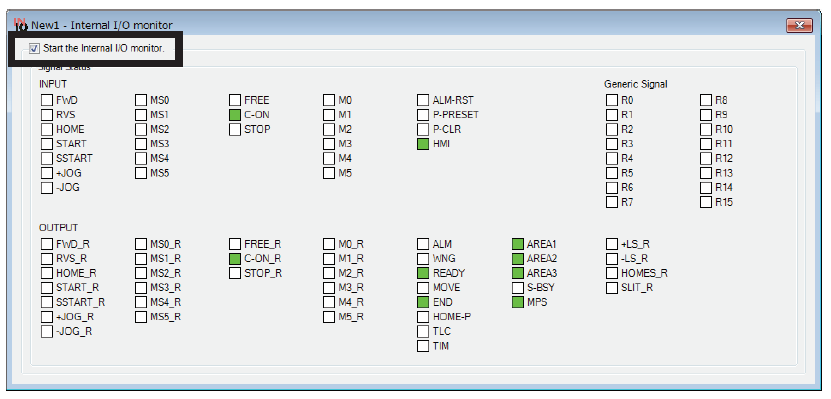
輸入輸出測試
I /O測試檢查驅動程序I/O的實時狀態;包括直接 I/O 和通過 RS-485 的遠程 I/O。它在故障排除期間很有用,可以確定某些功能無法正常工作的原因。
| 3. 提高可用性 |
以及上面提到的主要設計更改。有一些新功能增加了 BLV 系列的可用性以改善機器操作。
目錄輸出
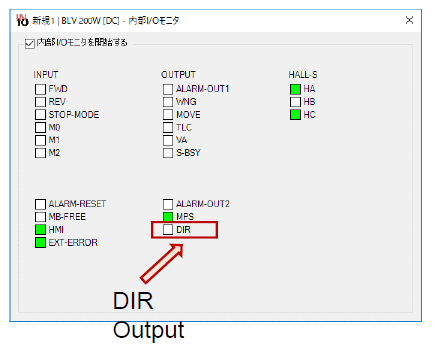
BLV 系列驅動器中添加了旋轉方向輸出。這允許用戶遠程監控電機方向。ON 表示正向,OFF 表示反向。過去,速度可以通過監控從速度輸出輸出的脈沖來計算。但是,無法確認旋轉方向。我們在收到市場的一些反饋后添加了此功能。
負載系數監控命令
為上層 PLC 或 HMI 的主從操作添加了新的監控命令。原BLV系列驅動器在通過網絡通訊運行時無法監控負載波動,因此我們對產品進行了改進,增加了更多的監控命令。新增負載率監控指令包括速度(齒輪軸)、速度小數點位置、輸送機運行速度、輸送機運行速度小數點位置、外部模擬速度設定、外部模擬轉矩限制、外部模擬電壓設定。
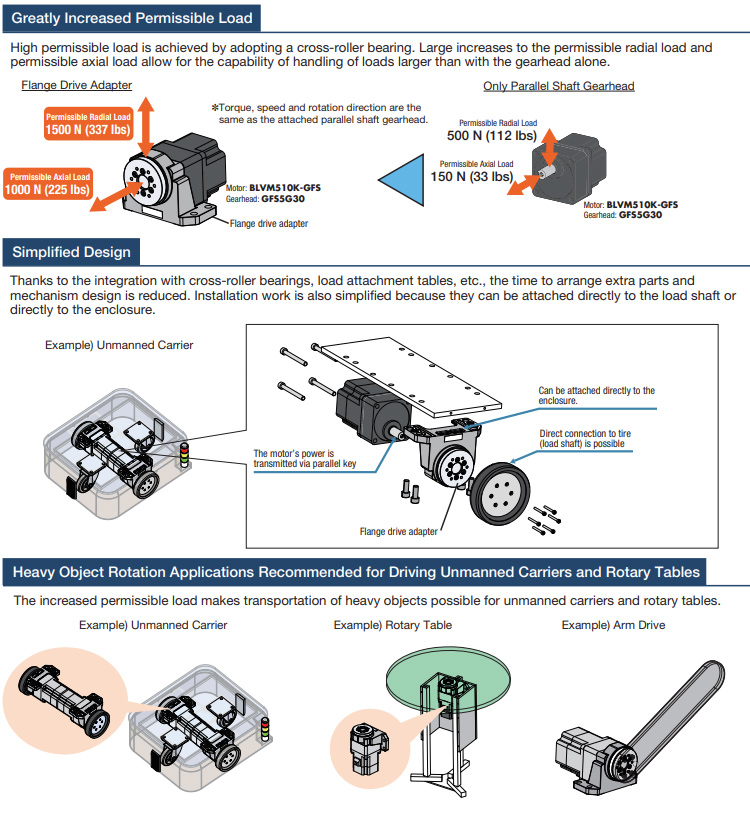
| 另外:法蘭驅動適配器簡化了設置并增加了徑向和軸向負載 | |
|
< > < >下載法蘭驅動適配器手冊 |
 |
| 帶走 |
BLV 100 W 平行軸齒輪電機和 FR 扁平空心軸齒輪電機已添加到 BLV 系列中,作為 AGV 和物料搬運反饋的結果。
易于使用的 MEXE02 支持軟件現在與所有 BLV 系列驅動程序兼容。
新的 DIR 輸出和網絡監控命令增加了 BLV 系列的可用性。
BLV 系列非常適合需要直流或電池供電的無刷電機的客戶、輸送機制造商以及需要工業網絡通信的客戶。FR 減速機推薦用于電機長度也有限制的高扭矩應用。為 BLV 系列添加 MEXE02 軟件支持可帶來許多好處,例如輕松的數據編程和狀態監控。
審核編輯黃宇
-
電機
+關注
關注
142文章
8933瀏覽量
145096 -
BLV
+關注
關注
0文章
6瀏覽量
7167
發布評論請先 登錄
相關推薦
CCS LDL2系列光源綠色型號的更新產品隆重亮相

AMD官宣銳龍9000X3D系列發布計劃
Simplelink? Wi-Fi? CC3x20、CC3x3x無線更新

蘋果AirPods系列固件更新,引領市場新標桿
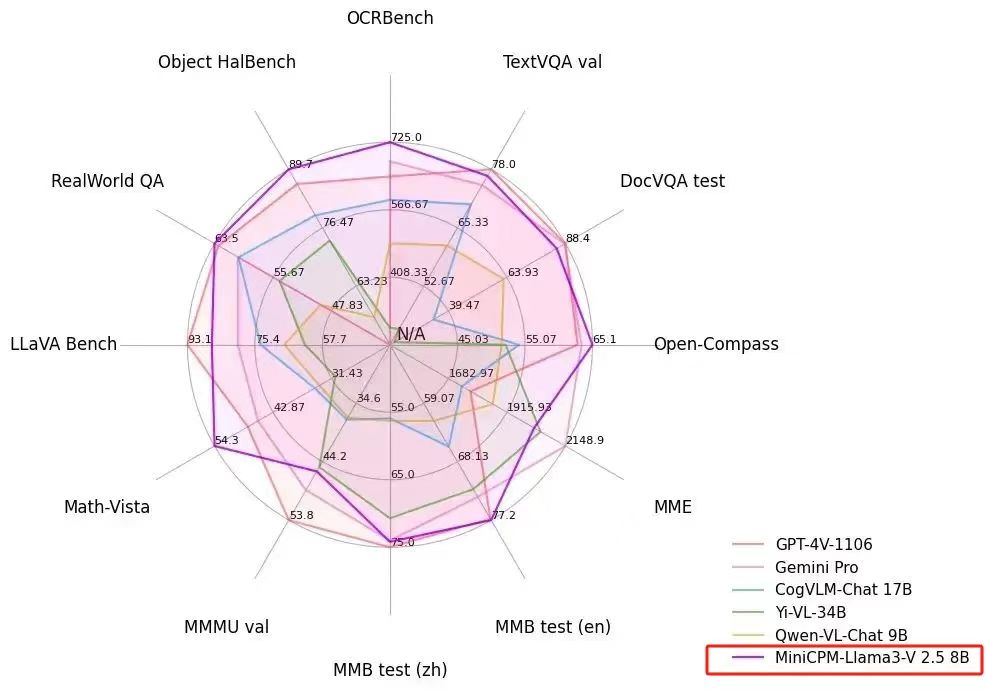
PerfXCloud 重大更新 端側多模態模型 MiniCPM-Llama3-V 2.5 閃亮上架
蘋果Mac產品線將迎來大規模更新,M4系列芯片成主角
tc397如何使用定時器的更新事件來觸發dma搬運數據?
xAI加速人工智能步伐,Grok系列大模型即將迎來重大更新
chrome插件新版本(v3版本)中的熱更新,即加載更新遠程js的方法探索
三星將Galaxy S20和Note 20軟件更新頻率降低至每季更新
SWAP是否適用于兩個用于TC3xx系列控制器的獨立軟件?
三種情況產生的感應電勢分析
WT2003H語音芯片系列:通過bin文件實現板載語音更新,支持寬范圍音頻碼率





 工商網監
工商網監
評論