") 工業(yè)機(jī)器人的組成、分類及其工作原理分別是什么?
工業(yè)機(jī)器人的組成、分類及其工作原理分別是什么?
一、工業(yè)機(jī)器人組成
工業(yè)機(jī)器人主要由主體、驅(qū)動(dòng)系統(tǒng)和控制系統(tǒng)三個(gè)基本部分組成。
主體 – 即機(jī)座和執(zhí)行機(jī)構(gòu),包括臂部、腕部和手部,有的機(jī)器人還有行走機(jī)構(gòu)。大多數(shù)工業(yè)機(jī)器人有3-6個(gè)運(yùn)動(dòng)自由度,其中腕部通常有1-3個(gè)運(yùn)動(dòng)自由度;

驅(qū)動(dòng)系統(tǒng) – 包括動(dòng)力裝置和傳動(dòng)機(jī)構(gòu),核心為減速器以及伺服電機(jī),用以使執(zhí)行機(jī)構(gòu)產(chǎn)生相應(yīng)的動(dòng)作;
控制系統(tǒng) – 是按照輸入的程序?qū)︱?qū)動(dòng)系統(tǒng)和執(zhí)行機(jī)構(gòu)發(fā)出指令信號(hào),并進(jìn)行控制。
二、工業(yè)機(jī)器人分類
關(guān)于工業(yè)機(jī)器人的分類,國(guó)際上沒有指定統(tǒng)一的標(biāo)準(zhǔn),可按負(fù)載重量、控制方式、自由度、結(jié)構(gòu)、應(yīng)用領(lǐng)域等劃分。
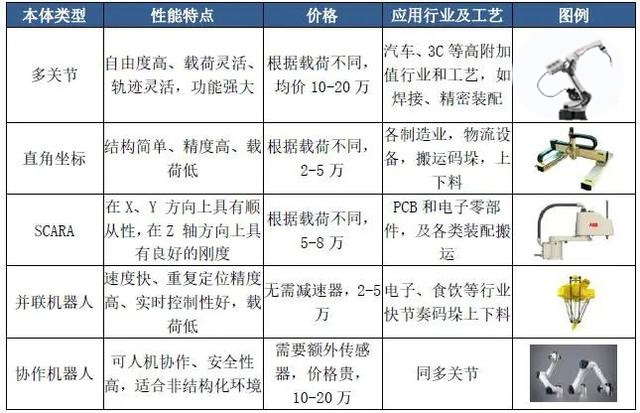
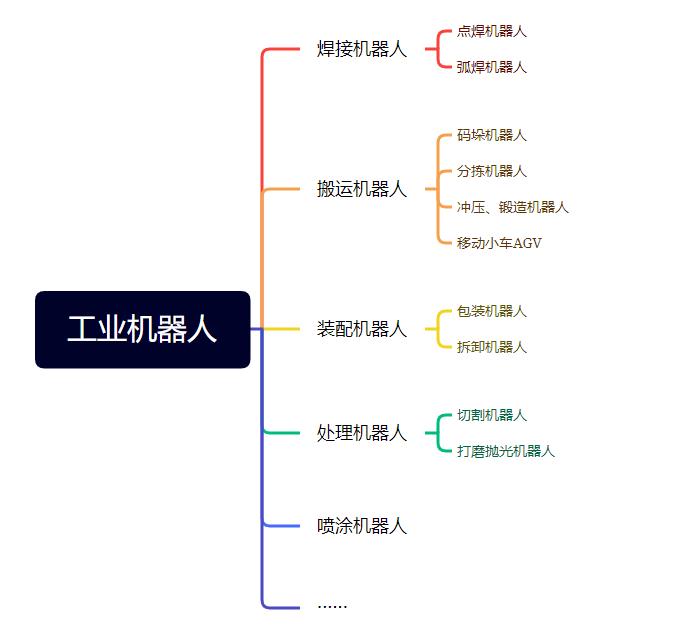
按照結(jié)構(gòu)形態(tài)分類如下:
按照應(yīng)用分類可以分為:焊接機(jī)器人、切割機(jī)器人、噴涂機(jī)器人、搬運(yùn)機(jī)器人、裝配機(jī)器人、打磨機(jī)器人。
三、工業(yè)機(jī)器人工作原理
機(jī)器人的工作原理是一個(gè)比較復(fù)雜的問題。簡(jiǎn)單地說,機(jī)器人的原理就是模仿人的各種肢體動(dòng)作、思維方式和控制決策能力。
從控制的角度,機(jī)器人可以通過如下四種方式來達(dá)到這一目標(biāo)。
“示教再現(xiàn)”方式:它通過“示教盒”或人“手把手”兩種方式教機(jī)械手如何動(dòng)作,控制器將示教過程記憶下來,然后機(jī)器人就按照記憶周而復(fù)始地重復(fù)示教動(dòng)作,如噴涂機(jī)器人。
“可編程控制”方式:工作人員事先根據(jù)機(jī)器人的工作任務(wù)和運(yùn)動(dòng)軌跡編制控制程序,然后將控制程序輸入給機(jī)器人的控制器,起動(dòng)控制程序,機(jī)器人就按照程序所規(guī)定的動(dòng)作一步一步地去完成,如果任務(wù)變更,只要修改或重新編寫控制程序,非常靈活方便。江蘇無錫專業(yè)工業(yè)機(jī)器人集成商,金紅鷹生產(chǎn)的機(jī)器人所用的工作方式多為示教再現(xiàn)和編程控制兩種,市場(chǎng)上大多數(shù)工業(yè)機(jī)器人都是按照這兩種方式工作的。
“遙控”方式:由人用有線或無線遙控器控制機(jī)器人在人難以到達(dá)或危險(xiǎn)的場(chǎng)所完成某項(xiàng)任務(wù)。如防暴排險(xiǎn)機(jī)器人、軍用機(jī)器人、在有核輻射和化學(xué)污染環(huán)境工作的機(jī)器人等。
“自主控制”方式:是機(jī)器人控制中最高級(jí)、最復(fù)雜的控制方式,它要求機(jī)器人在復(fù)雜的非結(jié)構(gòu)化環(huán)境中具有識(shí)別環(huán)境和自主決策能力,也就是要具有人的某些智能行為。
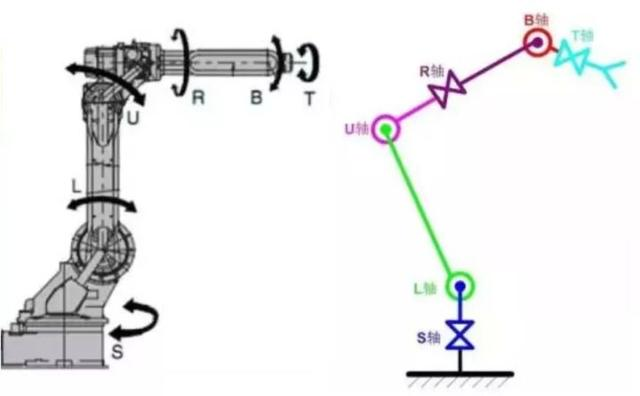
以六軸垂直多關(guān)節(jié)機(jī)器人為例(如下圖),通過機(jī)器人控制器及其控制系統(tǒng),可實(shí)現(xiàn)S軸回旋,L軸下臂傾動(dòng),U軸上臂傾動(dòng),R軸手臂橫擺,B軸手腕俯仰以及T軸的手腕回旋,實(shí)現(xiàn)六個(gè)軸的動(dòng)作操作與配合。
審核編輯黃宇
-
機(jī)器人
+關(guān)注
關(guān)注
210文章
28231瀏覽量
206615
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
焊接機(jī)器人六個(gè)軸分別是什么作用

工業(yè)機(jī)器人分類的關(guān)鍵因素是什么?有哪幾類?

巡線機(jī)器人電路圖 巡線機(jī)器人的工作原理和應(yīng)用領(lǐng)域
碼垛機(jī)器人的組成和工作原理
簡(jiǎn)述工業(yè)機(jī)器人控制系統(tǒng)的特點(diǎn)
工業(yè)機(jī)器人控制系統(tǒng)的基本組成有哪些
工業(yè)機(jī)器人的機(jī)械部分主要包括什么
工業(yè)機(jī)器人控制柜的組成有哪些
并聯(lián)機(jī)器人和串聯(lián)機(jī)器人的區(qū)別是什么?
工業(yè)機(jī)器人連接解決方案

焊接機(jī)器人的工作原理與優(yōu)勢(shì)分析

特種機(jī)器人的定義與分類

掃地機(jī)器人的工作原理和應(yīng)用芯片
LabVIEW的六軸工業(yè)機(jī)器人運(yùn)動(dòng)控制系統(tǒng)
工業(yè)機(jī)器人產(chǎn)業(yè)發(fā)展及應(yīng)用現(xiàn)狀






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論