") 【開源資料】嵌入式熱門DIY項目:智能機器人開源資料免費分享
【開源資料】嵌入式熱門DIY項目:智能機器人開源資料免費分享
智能機器人設(shè)計是不少電子發(fā)燒友首選的熱門DIY項目,現(xiàn)整理了一批機器人開源項目,基本都包含了原理圖、代碼、論文資料等,速度上車學(xué)習(xí)起來吧!(點擊閱讀原文即可免費下載資料)
1
機器人控制系統(tǒng)-嵌入式數(shù)字圖像處理全
部開源
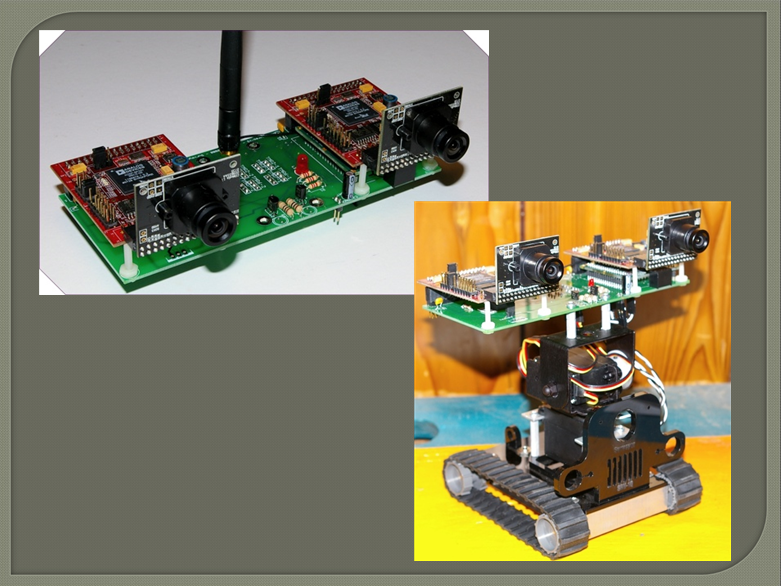
本文介紹一種嵌入式數(shù)字圖象處理平臺的實現(xiàn)方案,通過ARM和CPLD技術(shù),構(gòu)造一個數(shù)字圖像處理平臺作為嵌入式機器人控制系統(tǒng)的一個子系統(tǒng)。
嵌入式數(shù)字圖像系統(tǒng)需求包括圖像采集和分析方面,考慮到作為移動機器人系統(tǒng)應(yīng)用,因為機器人移動速率比較低的情況下,每秒10到15幀的圖像刷新速率基本可以滿足系統(tǒng)要求。同時,對圖像的分辨率的要求可以在640×480以內(nèi)的范圍內(nèi)可調(diào),一般情況下選擇640×480和320×240兩種主要的分辨率模式。
作為移動機器人系統(tǒng),一種無線通信機制應(yīng)該是必備的組成部分。作為子系統(tǒng)的圖像系統(tǒng)來說,一定的無線通信能力也可以滿足獨立構(gòu)成控制器的需要。以一種高速通信協(xié)議為基礎(chǔ)實現(xiàn)圖像處理結(jié)果上傳和指令下載成為了系統(tǒng)需求的一部分。最后,考慮到圖像系統(tǒng)有可能單獨構(gòu)成控制器,對其控制能力就提出來更多的要求,比如提供一定數(shù)量的GPIO和多種外設(shè)功能。
附件內(nèi)容包括:
-
論文一篇,有系統(tǒng)的思路,大體方案
-
原理圖一套,共三張
-
代碼一套,分:ARM,VHDL ,C#三個部分,分別是三個文件夾
-
PPT報告一份

2
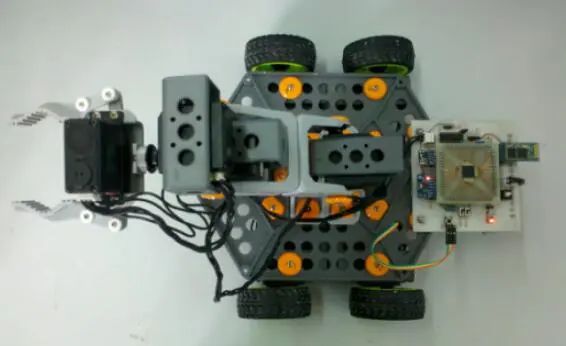
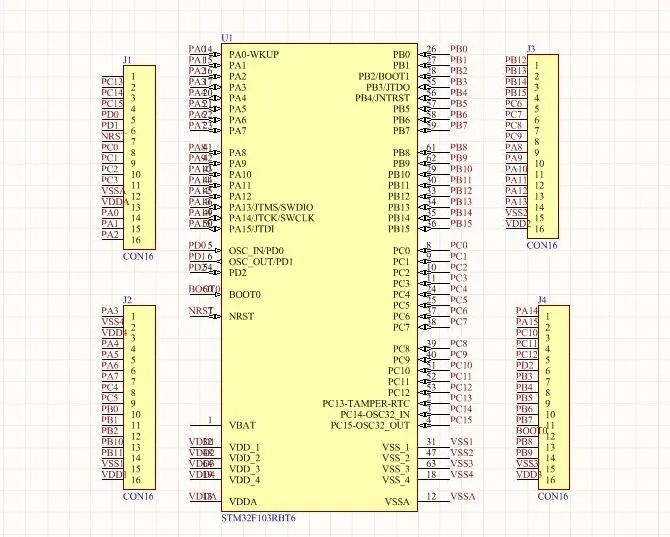
本文設(shè)計一種基于Android平臺實現(xiàn)語音識別和命令生成,通過藍牙無線傳輸至下位機,由下位機中的STM32F103控制器控制機器人完成用戶指令。
研究內(nèi)容:
隨著微處理器技術(shù)的發(fā)展與成熟,嵌入式語音識別系統(tǒng)已逐漸成為各領(lǐng)域研究的熱點方向,各種迎合人們需求的語音識別設(shè)備出現(xiàn)在我們的現(xiàn)實生活中。本課題重要研究的是通過語音識別技術(shù)控制機器人,該系統(tǒng)通過設(shè)備命令者的語言對機器人發(fā)出控制指令,讓機器人為我們服務(wù)。考慮的語音識別需要很大的運算量,這對于微處理器的速度就有了一定的要求,所以在本系統(tǒng)中,我們采用了谷歌公司的Google Voice Search語音處理引擎,通過使用該引擎完成語音識別。同時,我們采用上位機識別并發(fā)送控制指令,下位機控制機器人的方式,中間傳輸環(huán)節(jié)通過HC-05藍牙模塊實現(xiàn)。在下位機中,我們采用STM32RBT6控制器通過串行方式控制機器人上的舵機,從而實現(xiàn)對機器人整體的控制。
實現(xiàn)功能:
-
家政服務(wù)機器人要求為移動車體,具有機械手;
-
基于“安卓”實現(xiàn)簡單語音識別;
-
實現(xiàn)機械手臂簡單操作;
-
通過藍牙實現(xiàn)“安卓”對機器人的無線控制;
-
實現(xiàn)自動定位。

3
STM32 機器人視覺攝像機OpenMV
Cam設(shè)計
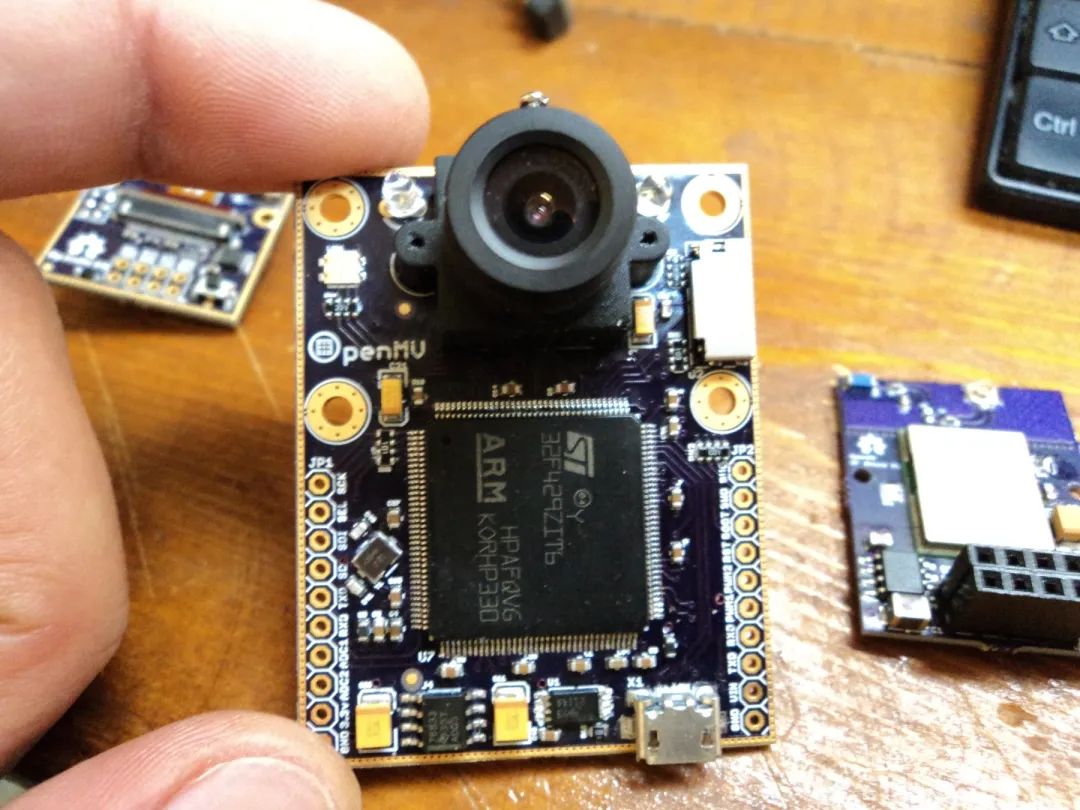
OpenMV項目旨在通過開發(fā)開源的低成本機器視覺攝像機,為業(yè)余愛好者和制造商提供機器視覺。OpenMV項目于2015年成功通過Kickstarter資助。第一代OpenMV攝像機基于STM的STM32F ARM Cortex-M MCU和Omnivision OV7725傳感器。OpenMV攝像機可以在Python3中進行編程,并附有大量的圖像處理功能,如面部檢測和跟蹤,關(guān)鍵點描述符,彩色斑點跟蹤,QR和條形碼支持,AprilTags,GIF和MJPEG記錄等等。
OpenMV攝像機板內(nèi)置RGB和紅外LED,用于編程和視頻流的USB FS,uSD插座和I / O頭,可以分解PWM,UART,SPI和I2C。此外,OpenMV還支持使用諸如WiFi,BLE,Thermal(FIR)和LCD屏蔽等I / O頭的擴展模塊(屏蔽)。
OpenMV配備了專門用于支持OpenMV攝像機的跨平臺IDE(基于QT創(chuàng)建者)。IDE允許查看幀緩沖區(qū),訪問傳感器控制,上傳腳本并通過串行通過USB(或WiFi / BLE(如果可用))在相機上運行它們。

4
國外可視化控制坦克機器人(硬件+
源代碼等)
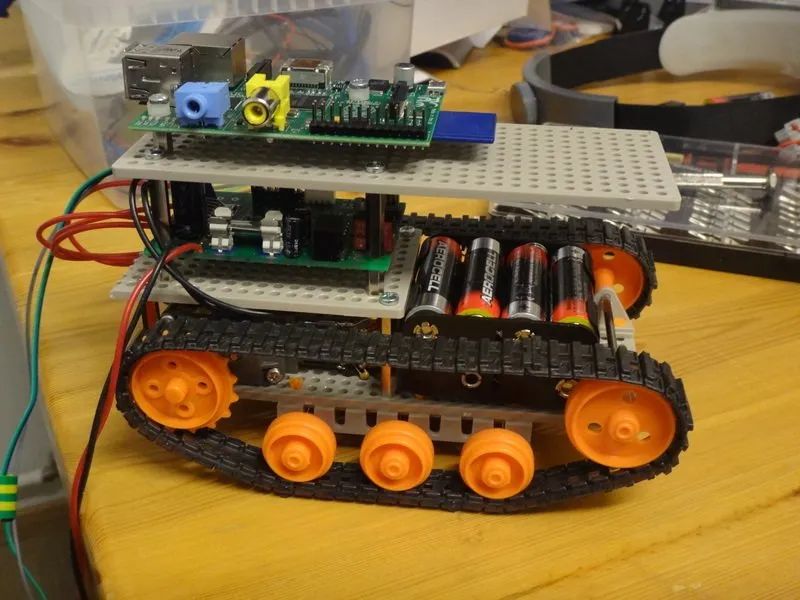
本文檔分享的是老外設(shè)計的可視化控制坦克機器人,設(shè)計資料很是全面,從整個硬件設(shè)計到源代碼,都免費分享給大家。要想完成該設(shè)計,本人認為還是需要有一定動手能力的人才能完成。
可視化控制坦克機器人概述:
該硬件電路主要包括主控制板、raspberry Pi板、電機驅(qū)動板、坦克機器人模型等組成。

5
手機APP、WIFI控制仿生四足機器人
設(shè)計,電路源碼
開源4足仿生蜘蛛機器人,可以wifi控制,當機器人上電后會初始化wifi模塊(ESP8266),讓wifi模塊釋放一個wifi信號,然后手機連接上這個wifi,在打開APP就可以控制機器人了。做的時候要注意舵機的安裝初始位置,還有就是wifi模塊買回來先要燒一下固件,資料里已經(jīng)打包好了固件和燒錄工具,燒完之后把wifi的波特率改成1200,因為用的是27M的內(nèi)部晶振,所以只有1200波特率沒有誤差了。電源是用充電寶改裝的,因為舵機啟動電流很大,所以要把充電寶拆開直接把里面18650電池的兩端引出線3.8V的,給舵機供電,充電寶的5v給單片機供電,wifi模塊是3.3v的,用lm1117-3.3之類的就行了,用的時候,5v哪里還要并一個大點的電解電容,47uf-100uf的都行,不然wifi會老是重啟。
這個源碼是從之前的6足機器人改過來的,所以很容易就可以在改成6足的,最多可控制18路舵機。有興趣的還可以加上壁障功能,亞克力板上已經(jīng)開好了空,或者裝個機器手之類的也行,留給大家做吧。
特別說明:現(xiàn)在只支持安卓手機,不支持蘋果手機。

6
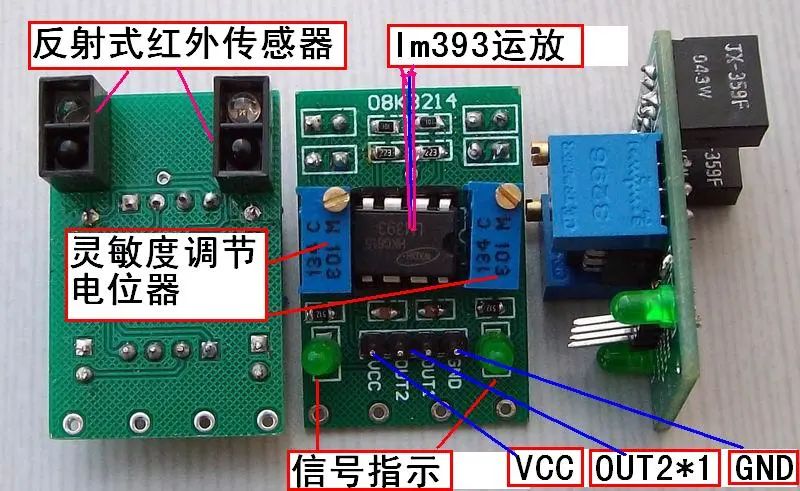
機器人專用 LM393 反射式紅外巡線
模塊(DXP工程文件+說明書等)
LM393 反射式紅外巡線模塊特點:
-
具有信號輸出指示。
-
雙路信號輸出。
-
輸出有效信號為低電平。
-
當有傳感器發(fā)射頭前方有物體反射紅外線時,輸出低電平。
-
應(yīng)用場合:可用于工件計數(shù)、尋線機器人、黑白檢測、有無檢測等。。。
-
電路板輸出開關(guān)量!
-
距離可調(diào)

本文由電子發(fā)燒友社區(qū)發(fā)布,轉(zhuǎn)載請注明以上來源。如需社區(qū)合作及入群交流,請?zhí)砑?/span>微信EEFans0806,或者發(fā)郵箱liuyong@huaqiu.com。
熱門推薦干貨好文
1、社區(qū)精選!PCB多層板設(shè)計挑戰(zhàn)賽作品集合
2、開源作品秀,教你如何DIY一款自己的聲源跟蹤小車
3、從零入門物聯(lián)網(wǎng)OH開源平臺,從簡單到高階項目,創(chuàng)客、電子愛好者都愛用!
4、低成本ESP32方案,支持OpenHarmony系統(tǒng)開發(fā)(附10+項目樣例Demo)
5、從0到1玩轉(zhuǎn)瑞薩RA4系列開發(fā)板,教你變著花樣玩板子
6、四核64位,超強CPU ,看RK3568“競”開發(fā)板DEMO!
8、全部開源 | 基于全志V85X的運動相機,工業(yè)網(wǎng)關(guān),可穿戴式攝像頭
9、高性能雙核RISC-V,滿足大多數(shù)開發(fā),這款國產(chǎn)MCU工程師都愛了
原文標題:【開源資料】嵌入式熱門DIY項目:智能機器人開源資料免費分享
文章出處:【微信公眾號:電子發(fā)燒友論壇】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
-
電子技術(shù)
+關(guān)注
關(guān)注
18文章
884瀏覽量
55853 -
電子發(fā)燒友論壇
+關(guān)注
關(guān)注
4文章
197瀏覽量
1055
原文標題:【開源資料】嵌入式熱門DIY項目:智能機器人開源資料免費分享
文章出處:【微信號:gh_9b9470648b3c,微信公眾號:電子發(fā)燒友論壇】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
圖紙代碼完全開源!稚暉君:人人都能造人形機器人!
【開源項目】你準備好DIY一款功能強大的機器人了嗎?
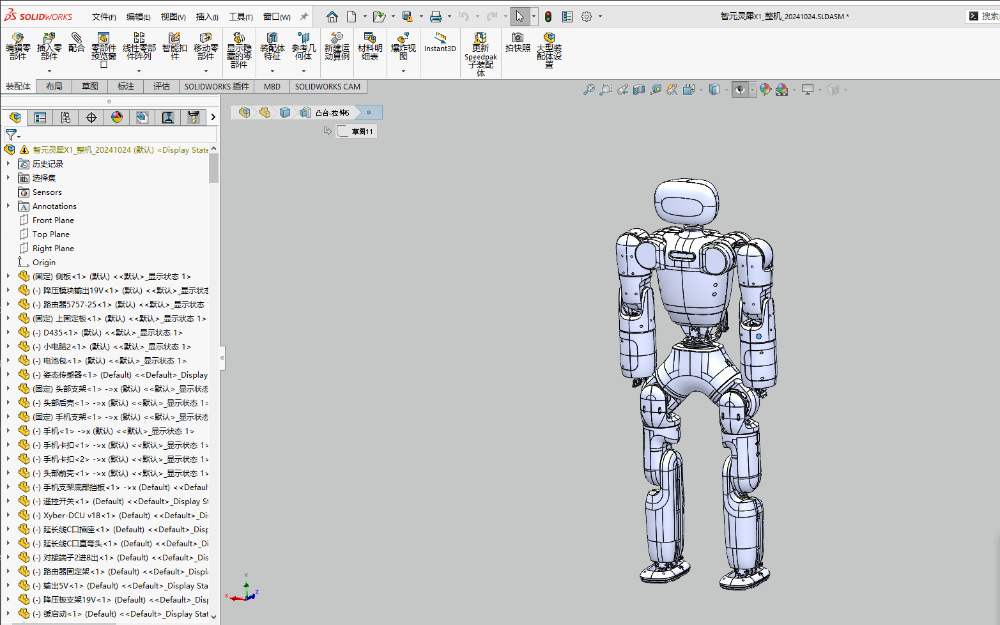
“0元購”智元靈犀X1機器人,軟硬件全套圖紙和代碼全公開!資料免費下載!
開源項目!用ESP32做一個可愛的無用機器人
開啟全新AI時代 智能嵌入式系統(tǒng)快速發(fā)展——“第六屆國產(chǎn)嵌入式操作系統(tǒng)技術(shù)與產(chǎn)業(yè)發(fā)展論壇”圓滿結(jié)束
開源項目!用ESP32做一個可愛的無用機器人
嵌入式掃描設(shè)備能否讓機器人更智能高效?

ROS讓機器人開發(fā)更便捷,基于RK3568J+Debian系統(tǒng)發(fā)布!
嵌入式熱門發(fā)展方向有哪些?
機器人基于開源的多模態(tài)語言視覺大模型






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論