") ?AGV機(jī)器人:基于視覺避障的理論基礎(chǔ)
?AGV機(jī)器人:基于視覺避障的理論基礎(chǔ)
AGV(Automated Guided Vehicle)簡介:
美國供應(yīng)鏈管理專業(yè)協(xié)會對AGV的定義:自動導(dǎo)引小車,是指裝備有電磁或光學(xué)等自動導(dǎo)引裝置,可以在規(guī)定的導(dǎo)航路徑上行駛,是具有安全保護(hù)以及各種移載功能的運(yùn)輸小車。
伴隨自動化程度的提高,傳統(tǒng)制造業(yè)的生產(chǎn)方式發(fā)生了深刻的變化,倉儲物流的自動化己是大勢所趨,生產(chǎn)由單一固定方式向具有較強(qiáng)適應(yīng)性的柔性生產(chǎn)線過度。為了節(jié)約成本、提高經(jīng)濟(jì)效益,柔性制造系統(tǒng)和自動化倉儲系統(tǒng)等先進(jìn)的生產(chǎn)方式得到廣泛應(yīng)用,它們是以高智能化系統(tǒng)為決策中心,以機(jī)器人、自動化立體倉庫、無人搬運(yùn)車等為主要設(shè)備。其中,無人搬運(yùn)設(shè)備以自動導(dǎo)引小車為標(biāo)志,它將電子計(jì)算機(jī)科學(xué)、圖像信號處理、自動控制等先進(jìn)技術(shù)融合,是現(xiàn)代物流系統(tǒng)、柔性生產(chǎn)組織系統(tǒng)的關(guān)鍵設(shè)備。
目前AGV的工作環(huán)境可分為室內(nèi)環(huán)境和室外環(huán)境,更多的系統(tǒng)是工作于室內(nèi)或以室內(nèi)為主要工作場所。因?yàn)槭覂?nèi)具有普遍性,能為各種場合使用的移動機(jī)器人研制提供理論和技術(shù)支持。室內(nèi)環(huán)境視作結(jié)構(gòu)化環(huán)境,光線較穩(wěn)定且環(huán)境復(fù)雜程度有限,結(jié)構(gòu)化道路上的標(biāo)識往往具有明顯的特征,比如顏色、寬度、邊界等,使得道路識別時可以用較簡單的方法進(jìn)行特征提取,進(jìn)而恢復(fù)道路場景。
AGV應(yīng)用范圍有:制造業(yè)、倉儲業(yè)、郵局、港口、機(jī)場、煙草、醫(yī)藥、食品、化工、核材料、感光材料特種行業(yè)等領(lǐng)域。
AGV導(dǎo)航方式:
移動機(jī)器人的導(dǎo)航問題主要涉及三個問題:“現(xiàn)在在何處?”,“要往何處去?”,“要如何去?”。其中第一個問題是導(dǎo)航系統(tǒng)中的定位問題,確定移動機(jī)器人在工作環(huán)境中相對于全局坐標(biāo)的位置及其本身的姿態(tài);第二、三個問題是導(dǎo)航系統(tǒng)的路徑規(guī)劃及跟蹤。
研究導(dǎo)航是為了使機(jī)器在沒有人為干預(yù)的情況下有目的地移動,并完成特定任務(wù),因此物流系統(tǒng)的柔性取決于的導(dǎo)引導(dǎo)航方式,在不同應(yīng)用場合的系統(tǒng)中采用的導(dǎo)引導(dǎo)航方式也是多元化的。
導(dǎo)引與導(dǎo)航是有差別的,導(dǎo)引是根據(jù)當(dāng)前狀態(tài)數(shù)據(jù)計(jì)算下一周期的運(yùn)行參數(shù),只需相對位置,與全局坐標(biāo)無關(guān),導(dǎo)航是指確定自身的位置及航向。AGV的主要導(dǎo)引和導(dǎo)航方式有:
(1)坐標(biāo)導(dǎo)引AGV
直接坐標(biāo)導(dǎo)引的原理是:首先把行駛區(qū)域用定位塊分成若干個標(biāo)準(zhǔn)統(tǒng)一的坐標(biāo)小區(qū)域,然后在行駛時統(tǒng)計(jì)經(jīng)過的小區(qū)域的個數(shù),以此來實(shí)現(xiàn)導(dǎo)引。常用的有兩種形式:光電式和電磁式。前者是通過不同顏色來劃分坐標(biāo)小區(qū)域,然后用對顏色敏感的光電器件來計(jì)數(shù);后者是用磁塊或者金屬塊來劃分坐標(biāo),然后使用對金屬敏感的電磁感應(yīng)器件來計(jì)數(shù)。
這種導(dǎo)引方式的優(yōu)點(diǎn)是:路徑修改簡單,導(dǎo)引的可靠性好,不受環(huán)境背景的影響。缺點(diǎn)是:安裝定位塊復(fù)雜,導(dǎo)引定位完全由定位塊的大小和個數(shù)決定,工作量大,精度較低。
(2)電磁導(dǎo)引AGV
電磁導(dǎo)引是使用較多的導(dǎo)引方式之一,埋在地下的導(dǎo)線帶有電磁頻率,通過一個叫做“地面控制器”的設(shè)備打開或關(guān)閉導(dǎo)線中的頻率,電磁導(dǎo)引靠感應(yīng)產(chǎn)生的電磁頻率引導(dǎo)沿著埋設(shè)的路線行駛。該導(dǎo)引方式技術(shù)成熟,經(jīng)濟(jì)可靠、引線隱蔽、不易污損和被破壞、導(dǎo)引原理簡單而且便于通訊、不受聲光干擾;但靈活性差、對地面的平整度要求高,路徑難以更改擴(kuò)展。
(3)光學(xué)導(dǎo)引AGV
光學(xué)導(dǎo)引是根據(jù)單一光源傳播過程不會改變的原理,在的行駛路徑上鋪設(shè)一條反光率穩(wěn)定的色帶,同時在車上裝配能發(fā)射和接收光源的光電傳感器,通過實(shí)時比較發(fā)射與檢測到的信號來調(diào)整車輛的運(yùn)行方向`。它的優(yōu)點(diǎn)是導(dǎo)向線鋪設(shè)費(fèi)用較低,靈活性較好,但對色帶的污染和機(jī)械磨損十分敏感,對環(huán)境要求過高,導(dǎo)引可靠性較差。
(4)激光紅外導(dǎo)航AGV
激光紅外導(dǎo)航是在上裝備可發(fā)射和接收激光紅外線的掃描器,導(dǎo)向區(qū)域的四周安裝數(shù)量足夠的激光反射板,通過激光掃描器發(fā)射激光束,同時采集由反射板反射的激光束,通過三角幾何運(yùn)算確定其當(dāng)前的位置和航向來實(shí)現(xiàn)的導(dǎo)引。該導(dǎo)航方式的優(yōu)點(diǎn)是定位精確,行駛路徑可靈活多變,能夠適合多種現(xiàn)場環(huán)境;缺點(diǎn)是制造成本高,位置計(jì)算復(fù)雜,抗光干擾的糾錯能力有限。
(5)視覺導(dǎo)航AGV
視覺導(dǎo)航,又稱圖像識別導(dǎo)引。工作原理為攝像機(jī)動態(tài)攝取路徑信息,通過圖像處理技術(shù)識別出欲跟蹤的路徑,引導(dǎo)運(yùn)行。視覺導(dǎo)航式既能獲取大信息量,又具備路徑設(shè)置和變更簡單,還有系統(tǒng)柔性好等特點(diǎn)。此外,慣性導(dǎo)航方式和GPS導(dǎo)航方式多用于軍方。
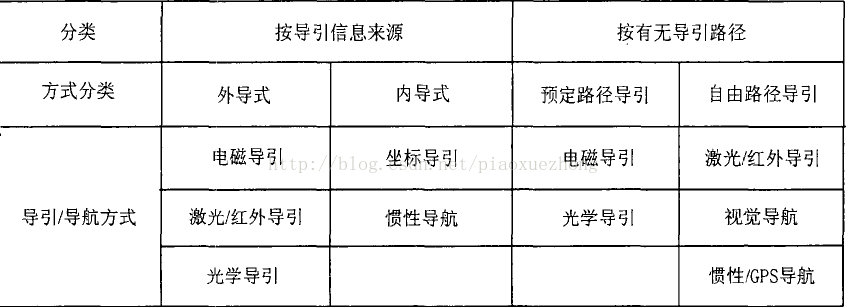
AGV的多種導(dǎo)引/導(dǎo)航方式根據(jù)導(dǎo)引信息的來源,可分為外導(dǎo)式和內(nèi)導(dǎo)式。按導(dǎo)引有無預(yù)定路徑的形式,主要分為預(yù)定路徑導(dǎo)引和自由路徑導(dǎo)引兩大類。
導(dǎo)航標(biāo)示線檢測算法研究:
以車道標(biāo)示線為道路邊緣的視覺檢測是AGV路徑識別需要實(shí)現(xiàn)的基本功能。視覺導(dǎo)航式AGV是利用ccd攝像機(jī)采集地面鋪設(shè)的條帶狀標(biāo)示線,采用圖像處理和分析的方式來獲取導(dǎo)引車周圍環(huán)境信息,這種方式是AGV識別系統(tǒng)中的核心技術(shù)。
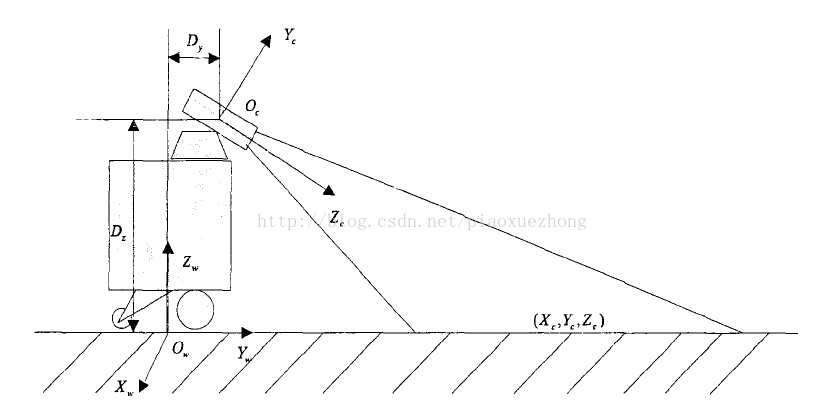
涉及內(nèi)容:坐標(biāo)系建立,車道模型分析,圖像預(yù)處理等。下面重點(diǎn)對圖像處理方面進(jìn)行介紹 :
人們對車用機(jī)器視覺研究有一個基本共識:圖像在獲取、轉(zhuǎn)換和傳送中都會產(chǎn)生污染,不可避免的造成圖像質(zhì)量的降低,因此,首先應(yīng)對視頻圖像進(jìn)行預(yù)處理,然后進(jìn)行閾值分割,再對路徑進(jìn)行識別與跟蹤。
視覺導(dǎo)航式AGV上車載攝像機(jī)獲取的原始圖像中除了包含可用信息外,由于受到環(huán)境限制以及加入的隨機(jī)干擾,使得冗余信息多,可識別性較差,首先必須對原始圖像進(jìn)行預(yù)處理,流程如下:
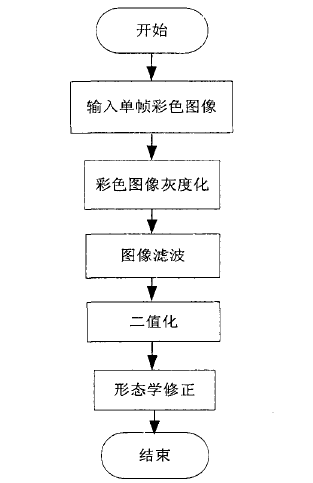
圖像平滑是一種低通濾波技術(shù),可以分別在頻率域和空間域進(jìn)行。
(1)模板操作。
模板操作實(shí)現(xiàn)一種鄰域運(yùn)算,即某個像素點(diǎn)的結(jié)果不僅和本像素灰度有關(guān),而且和其鄰域點(diǎn)的值有關(guān)。模板運(yùn)算在數(shù)學(xué)中的描述稱之為卷積。
(2)中值濾波。
中值濾波是將鄰域中的圖像像素按灰度級排序,取中間值為輸出像素,屬于非線性的空域?yàn)V波技術(shù),是一種能去除噪聲的同時又能保護(hù)目標(biāo)邊界不使其變得模糊的濾波方法。其原理是選取一個含有奇數(shù)個數(shù)像素點(diǎn)的移動窗口,將窗口的中心像素的灰度值用窗口內(nèi)灰度的中值代替,從而消除孤立的噪聲點(diǎn),其數(shù)學(xué)表達(dá)式如下:

其中,f(x,y),g(x,y)分別為原始圖像和處理后圖像,φ為二維模板,通常為2*2,3*3區(qū)域。
(3)形態(tài)學(xué)修正。
上述處理后的二值化圖像中可能仍有少量零散點(diǎn),而且黑色部分的邊緣不是很清晰,存在毛刺和漏洞。對二值化后的圖像進(jìn)行數(shù)學(xué)形態(tài)學(xué)濾波實(shí)現(xiàn)局部背景平滑。數(shù)學(xué)形態(tài)學(xué)主要運(yùn)算有形態(tài)和膨脹、形態(tài)差腐蝕、開運(yùn)算、閉運(yùn)算。
腐蝕運(yùn)算的作用是用來消除圖像中小于結(jié)構(gòu)元素的無意義邊界點(diǎn),使目標(biāo)物體的邊界向內(nèi)部收縮;膨脹運(yùn)算的作用是用來填補(bǔ)圖像中目標(biāo)物體的空洞點(diǎn),使物體的邊界向外部擴(kuò)張;腐蝕和膨脹的復(fù)合運(yùn)算即成為開運(yùn)算和閉運(yùn)算:開運(yùn)算是對圖像進(jìn)行先腐蝕后膨脹的處理過程,能夠消除圖像中的邊緣毛刺和孤立斑點(diǎn);閉運(yùn)算與開運(yùn)算過程相反,填補(bǔ)圖像中的漏洞以及裂縫。它們能對圖像進(jìn)行簡單的平滑處理,并檢測出圖像中的奇異點(diǎn)。根據(jù)二值化的處理結(jié)果,我們需要把圖像中的漏洞和毛刺去掉,并且保持原圖像特征不變,因此可以對圖像進(jìn)行開運(yùn)算以使黑色邊緣清晰便于邊緣檢測。
(4)導(dǎo)航標(biāo)示線邊緣檢測算法
邊緣是指圖像局部亮度變化顯著的部分,是圖像內(nèi)像素灰度不連續(xù),或灰度變化劇烈的點(diǎn)的集合。邊緣檢測的目的是標(biāo)識數(shù)字圖像中亮度變化明顯的點(diǎn),計(jì)算機(jī)視覺處理方法雖然不明顯依賴于邊緣檢測作為預(yù)處理,但邊緣檢測仍是圖像分割所依賴的重要特征,是圖像分析的重要基礎(chǔ)。常用的邊緣檢測算子有:
(4.1)梯度算子:sobel算子,prewitt算子。
(4.2)基于圖像函數(shù)二階導(dǎo)數(shù)過零點(diǎn)的算子:LOG算子,canny算子。
障礙物識別研究:
對于障礙物的識別,方法的選取是取決于周圍環(huán)境以及對障礙物的定義。障礙物可以定義為在車輛前方行駛道路上具有一定體積的物體,道路上常見的障礙物包括車輛、貨物、雜物等。
障礙物識別技術(shù)中最關(guān)鍵的是檢測、跟蹤和定位技術(shù)。檢測是指確認(rèn)前方視野路徑上是否出現(xiàn)障礙物,跟蹤是指對選中的目標(biāo)進(jìn)行軌跡描述,定位是指計(jì)算出障礙物與自動導(dǎo)引車的實(shí)際距離。其中,檢測是基礎(chǔ),跟蹤是過程,定位是最終目的。
空間目標(biāo)的跟蹤,是通過目標(biāo)的有效特征構(gòu)建模板,在圖像序列中尋找與目標(biāo)模板最相似的候選區(qū)域位置的過程,也就是確定目標(biāo)在序列圖像中的軌跡。在基于單目視覺的空間障礙物目標(biāo)跟蹤問題的研究上,一般有兩種思路:
(1)不依賴于任何先驗(yàn)知識,直接從圖像序列中檢測出障礙物,然后跟蹤其中感興趣的目標(biāo)。
(2)依賴于障礙物的先驗(yàn)知識,首先對可能出現(xiàn)的目標(biāo)建模,然后在圖像序列中實(shí)時檢測出與模型相匹配的目標(biāo),然后進(jìn)行跟蹤。
最常用的是第二種思路,因?yàn)檎系K物存在于某一特定運(yùn)行環(huán)境中,可以用含有有限元的完備集合來表示。對于這種跟蹤方法,實(shí)現(xiàn)跟蹤的第一步是進(jìn)行目標(biāo)檢測,即從序列圖像中將感興趣區(qū)域從背景圖像中提取出來。
在目標(biāo)跟蹤過程中,往往需要采用搜索算法預(yù)計(jì)未來時刻某目標(biāo)的位置,以縮小搜索范圍。根據(jù)這個思路一般有兩類算法:
(一)預(yù)測目標(biāo)在下一幀圖像可能出現(xiàn)的位置,然后在這個相關(guān)區(qū)域內(nèi)尋找最優(yōu)點(diǎn),常用的預(yù)測算法有kalman濾波、擴(kuò)展的kalman濾波,粒子濾波等。
(二)減小目標(biāo)搜索范圍的算法,通過優(yōu)化搜索方向,利用某些估計(jì)的方法優(yōu)化求取目標(biāo)模板和候選目標(biāo)之間距離的迭代收斂過程,縮小搜索范圍,如均值平移算法算法(MeanShift算法)、連續(xù)自適應(yīng)均值平移算法(Camshift)、置信區(qū)域算法。
對于空間目標(biāo)定位算法的研究,主要集中在獲取場景中目標(biāo)上的各點(diǎn)相對于攝像機(jī)的距離,這是機(jī)器視覺的主要任務(wù)之一,也是障礙物識別的最終目的。通過計(jì)算目標(biāo)與攝像機(jī)的距離參數(shù),就能得到目標(biāo)相對于小車的速度,目標(biāo)物大小等參數(shù),更好的為控制的運(yùn)行狀態(tài)提供決策數(shù)據(jù)。這里我搜集了關(guān)于基于視覺移動避障的幾種實(shí)現(xiàn)思路:
常用的計(jì)算機(jī)視覺方案有多種, 比如雙目視覺,基于TOF的深度相機(jī),基于結(jié)構(gòu)光的深度相機(jī)等。深度相機(jī)可以同時獲得RGB圖和深度圖,不管是基于TOF還是結(jié)構(gòu)光,在室外強(qiáng)光環(huán)境下效果都不太理想,因?yàn)樗鼈冃枰鲃影l(fā)光,容易受到強(qiáng)光的干擾;基于結(jié)構(gòu)光的深度相機(jī),發(fā)射出的光會生成相對隨機(jī)但又固定的斑點(diǎn)圖樣,這些光斑打在物體上后,因?yàn)榕c攝像頭距離不同,被攝像頭捕捉到的位置也不相同,之后先計(jì)算拍到的圖的斑點(diǎn)與標(biāo)定的標(biāo)準(zhǔn)圖案在不同位置的偏移,利用攝像頭位置、傳感器大小等參數(shù)就可以計(jì)算出物體與攝像頭的距離。對于AGV,雙目視覺更加合適:
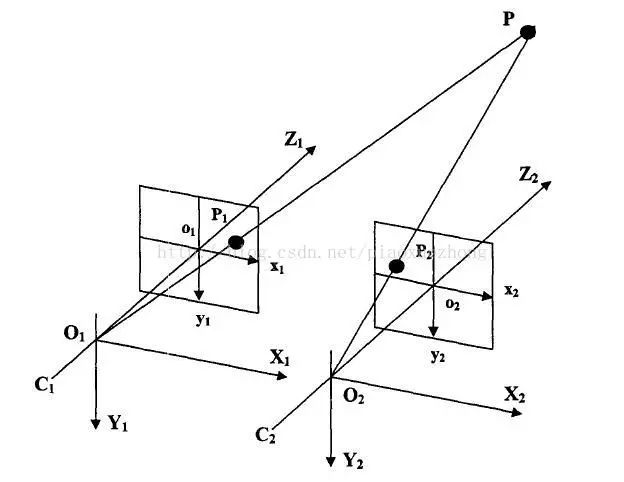
雙目視覺的測距本質(zhì)上是三角測距法,由于兩個攝像頭的位置不同,就像人的兩只眼睛,看到的物體不一樣。兩個攝像頭看到的同一個點(diǎn)P,在成像的時候會有不同的像素位置,此時通過三角測距就可以測出這個點(diǎn)的距離。雙目算法計(jì)算的點(diǎn)一般是利用算法抓取到的圖像特征,如SIFT或SURF特征等,通過特征計(jì)算出來的是稀疏圖。
基于雙目立體視覺的障礙物檢測的關(guān)鍵在于兩點(diǎn)①障礙物目標(biāo)的提取,即識別出障礙物在圖像中的位置和大小;②障礙物目標(biāo)區(qū)域圖像對之間的立體匹配點(diǎn),從而得到障礙物目標(biāo)的深度信息。前一步是后一步的基礎(chǔ),識別出來的目標(biāo)可以是多個,在立體匹配得到視差之后才可以標(biāo)志出哪些目標(biāo)為障礙物目標(biāo)。
雙目體視技術(shù)的實(shí)現(xiàn)可分為:圖像獲取、攝像機(jī)標(biāo)定、特征提取、圖像匹配和三維重建。上圖中的光軸是近似平行的,在平行光軸系統(tǒng)中,雙目視覺測距將三維場景中求目標(biāo)深度的問題轉(zhuǎn)化為求二維投影圖像中求視差的問題。因此,像機(jī)模型就是將三維場景的點(diǎn)與二維圖像上的點(diǎn)建立一一對應(yīng)的映射關(guān)系。
審核編輯 :李倩
-
機(jī)器人
+關(guān)注
關(guān)注
210文章
28212瀏覽量
206559 -
電磁
+關(guān)注
關(guān)注
15文章
1075瀏覽量
51717 -
AGV
+關(guān)注
關(guān)注
27文章
1281瀏覽量
41016
原文標(biāo)題:【光電智造】?AGV機(jī)器人:基于視覺避障的理論基礎(chǔ)
文章出處:【微信號:今日光電,微信公眾號:今日光電】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
激光導(dǎo)航AGV底盤定制 巡檢機(jī)器人,服務(wù)機(jī)器人,智慧物流搬運(yùn)AGV
【KittenBot機(jī)器人試用申請】KittenBot繪圖避障機(jī)器人學(xué)習(xí)課程
解讀機(jī)器人的幾大避障技術(shù)
基于圖像的機(jī)器人視覺伺服系統(tǒng)該怎么設(shè)計(jì)?
智能機(jī)器人避障安全性概述
arduino nano避障機(jī)器人

基于Arduino的避障機(jī)器人汽車
藍(lán)牙控制的避障機(jī)器人
AGV機(jī)器人:基于視覺避障的理論基礎(chǔ)

視覺、激光、結(jié)構(gòu)光?掃地機(jī)器人導(dǎo)航避障技術(shù)盤點(diǎn)
不止于看見:AGV機(jī)器人基于視覺避障的理論基礎(chǔ)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論