 增量與絕對系統
增量與絕對系統
“絕對”和“增量”這兩個術語在位置控制領域經常出現。確切的含義根據它們所使用的上下文而變化。例如,絕對和增量運動可以通過將其與絕對原始位置或最后已知位置相關聯來指代電機完成的運動類型。絕對和增量反饋也可以指與電機一起使用的反饋設備的類型。在這篇博文中,我們將重點關注反饋系統,并希望為您澄清一些差異。
首先,讓我們回顧一下增量反饋系統。一個例子如下所示。
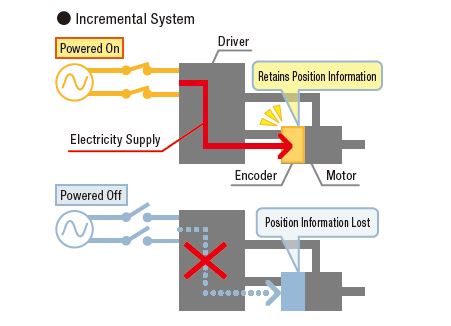
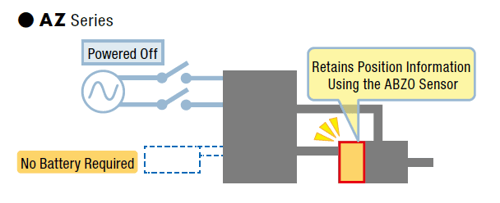
通電后,光電編碼器從電源接收電能,隨著電機軸的轉動輸出數字脈沖信號。但是,當電源關閉時,編碼器的電源也被切斷,脈沖信號停止。此時,相對于起始參考位置的當前位置丟失了。要再次參考相同的原點位置,需要進行原點例行操作,這可能會占用正常操作之外的寶貴時間。
更多關于編碼器...
編碼器是一種安裝在電機軸上并使用數字脈沖跟蹤電機位置的機電設備。通過計算編碼器產生的脈沖數,可以通過簡單的計算確定與最后已知位置的距離,從而驗證電機是否處于目標位置。
在編碼器內部,有一個光發射器、一個邊緣帶有切縫的圓盤和一個光接收器。當編碼器盤隨電機軸旋轉時,編碼器盤上的狹縫將一側的靜態光源變成另一側的閃光。另一側的光接收器檢測這些光脈沖,并以數字方式輸出方波脈沖信號給上位控制器。如果編碼器和電機之間的分辨率相同,則每一步都會產生一個脈沖。
在增量系統中,增量編碼器是典型的反饋設備。增量編碼器具有 2 或 3 通道(A/B 或 A/B/Z)輸出。每個通道相當于編碼器盤外緣上切縫的物理軌道(對于典型的編碼器,每個 A/B 通道有 200 個切縫)。通道 A 和 B 的狹縫偏移或異相 90°,以便判斷運動方向。第三個 Z 通道只是單個軌道上的一個狹縫,可以標記起始位置或計算轉數。稍后有一張圖片可以幫助解釋這一點。
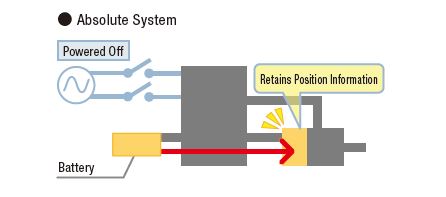
由于光學編碼器依靠電力產生光脈沖,因此如果需要絕對位置跟蹤,增量系統并不是最理想的。
增量編碼器和絕對編碼器之間的區別在于它可以輸出的信息位數。從結構上看,絕對編碼器的光盤上有更多的狹縫。請記住,增量編碼器的光盤上有狹縫,以產生光脈沖。然而,每一步都會產生相同的脈沖,這并不是該位置獨有的。在絕對編碼器的光盤上,有多個不同大小的狹縫軌道。每個軌道都有自己的光發射器和接收器。因此,不只是接收一個信號,而是可以將多個信息比特組合起來形成唯一的“地址”。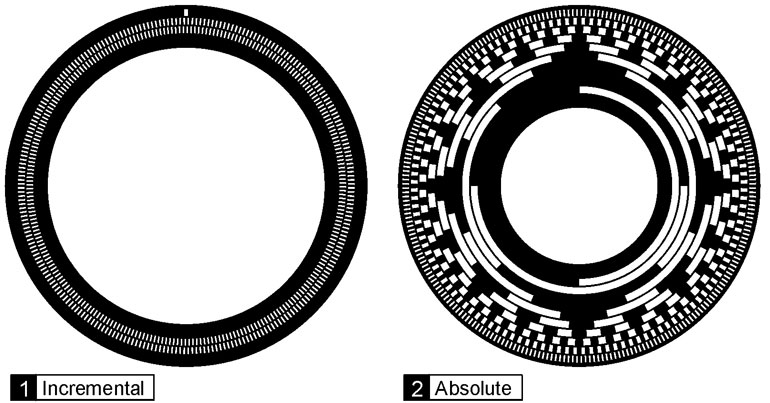
下表突出了增量系統和絕對系統的優缺點。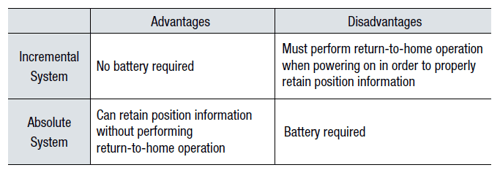
< >< >
審核編輯黃宇
-
編碼器
+關注
關注
45文章
3596瀏覽量
134169 -
電機
+關注
關注
142文章
8933瀏覽量
145101 -
增量
+關注
關注
0文章
8瀏覽量
6417
發布評論請先 登錄
相關推薦
增量式編碼器與絕對式編碼器的區別

增量式與絕對式拉繩位移傳感器的應用及原理
絕對編碼器和增量編碼器在性能對比
伺服電機中增量式與絕對值相關資料分享
增量式與絕對值編碼器的區別在哪
增量型編碼器與絕對型編碼器的區別
增量式編碼器和絕對值編碼器選哪個?
絕對編碼器與增量編碼器的使用
絕對編碼器與增量編碼器的比較和使用
絕對值編碼器和增量式編碼器不同在哪兒?
增量式編碼器和絕對值編碼器有哪些區別?


增量編碼器與絕對值編碼器的區別






 工商網監
工商網監
評論