 制造機器人有多容易
制造機器人有多容易

由于全球在降低長期成本、保持質量和騰出時間讓人類完成“人類”任務方面的努力,機器人在許多行業的采用率正在增加。例如,通過使用機器人清潔地板或在超市補貨,人類員工可以花更多時間幫助客戶或向客戶銷售產品。公司可以通過購買現成的機器人或以更低的成本制造自己的機器人來利用這種機器人趨勢。
如果工程資源有限,選擇合適的組件可以降低構建機器人的難度和時間。
在這篇文章中,我將簡要介紹我們構建 7 軸機械臂所采取的步驟、我們在此過程中學到的一些東西,以及用更少的組件完成它的方法。
1. 頭腦風暴——你需要什么來完成手頭的任務?
頭腦風暴是機器制造過程的概念階段,機器人設計師決定他們要制造什么類型的機器人,它需要執行什么任務,以及它需要做得多好。第一步可以像草圖一樣簡單,但也需要制定細節。對于機械臂,我們需要確定運動軸的數量以及滿足要求的組件類型。這些選擇包括 PNP 或 NPN 輸出傳感器、增量或絕對編碼器、平行(直列)齒輪箱或直角齒輪箱、諧波或行星齒輪,或者伺服電機與步進電機。
設計人員需要評估每種組件的優缺點,并選擇最適合預期應用的組件。例如,伺服電機和步進電機可以執行相同的任務,但速度、噪音和熱量可能是決定因素。然而,多年來已經解決了這些問題,對于不需要極高速度的應用,應將其視為伺服電機的替代品。研究類似的機器人是如何設計的,以及哪些部件可以在內部制造可能會有所幫助。不要忘記關注機器的總體成本,包括工時,以取悅您的老板。< >閉環步進電機技術
2. 設計——確保一切都適合并確定電機的尺寸。
這個階段是時候考慮機器人中所有必要組件的布局,并檢查所有規格和尺寸圖以確保所有組件兼容并適合設計。3D CAD 繪圖是可視化設計的好方法。選擇能夠提供大部分組件(和 CAD 圖紙)的制造商有助于最大程度地減少工作量。很多注意力通常都放在較大的組件上,例如電機、驅動器和 PLC,但較小的組件,例如電纜或開關,也需要空間。請記住,較重的部件需要更大的電機才能移動,因此請考慮為金屬部件(例如臂段)選擇材料。
在這一點上確定所選電機是否能夠完成工作也很重要。許多制造商都提供電機選型軟件,以幫助找到最適合應用的電機。Oriental Motor 非常重視電機選型。我們的工程師很樂意分析您的選型結果,這樣您就可以充分利用我們的產品。
< >電機尺寸
3. 物料清單 - 確保您擁有所需的一切。
一旦確認了所有必要的組件,就該制作物料清單了。清楚地記錄零件編號、數量、價格和交貨時間,以避免訂單錯誤造成的延誤,并保存信息以避免重復工作。
購買前核實所有零件號、規格、尺寸和交貨時間,因為缺少一個字母或數字可能意味著不同的產品。再一次,盡量不要忘記制造商提供的安裝支架和預制電纜等小東西。這些將節省您的時間。此外,請考慮購買更多數量以避免因意外產品損壞而造成的延誤。
|
提示 注意有助于消除額外組件的內置功能。例如,Oriental Motor的AZ系列閉環步進電機內置多旋轉機械式絕對編碼器,即使斷電也能保持位置數據。因此,它可以消除對存在傳感器、電纜和電池的需求。 < >了解更多 |
一旦提交了物料清單的采購訂單,我們就用時間準備電纜組件或制造支架。根據我多年的故障排除經驗,雖然看起來很容易,但制造電纜比您想象的更具挑戰性。制作不良的電機電纜通常是問題的根源,并且可能會使驅動器中的電路短路,因此請花時間在第一時間做對。
4. 構建 - 從下往上一次構建一個軸,或將它們分開。
一旦收到 BOM 中的組件和材料,就可以開始組裝/構建過程。從底軸開始并逐步向上會更容易。一個明顯的原因是,對于多軸機械臂,底軸通常是最重的,因為它必須承載所有其他軸并處理力矩負載。 一旦將底部旋轉執行器安裝在剛性底座上,您就可以模塊化地一個接一個地安裝每個軸,并在安裝過程中進行測試。一些設計師可能更喜歡在進行最終組裝之前先組裝和測試每個軸。
5. 接線 - 確保電纜已牢固擰緊且不會受到傷害。
對于機械臂,電纜的組織可以避免潛在的電纜扭曲問題、斷開連接甚至連接器破損。管理不善的電纜系統也會減少機械臂的運動范圍。良好的電纜管理實踐可以像使用電纜扎帶一樣簡單。另一個例子是 XYZ 平臺上使用的線性致動器的電纜軌道。一些制造商提供標準型和柔性型電纜。柔性型電纜設計用于反復彎曲并提供更小的彎曲半徑。它們非常適合電纜隨運動移動的應用。
6. 編程——比你想象的要花更長的時間。
許多制造商使用他們自己的軟件來為他們的電機編程。如果您還不知道如何對軟件進行編程,那么學習曲線可能會很長。建議留出比預期更多的編程時間。使用通用軟件或同一制造商的產品有助于縮短學習曲線。可以有多種方法來對相同類型的運動進行編程。類似于設計,越簡單越好。幸運的是,我們能夠使用一個軟件對所有驅動程序進行編程。由于運動數據存儲在驅動程序中,我們能夠簡化 PLC/HMI 編程。
7. 測試、測試、再測試——想想所有可能的場景。
這是真正有趣的部分。現在一切都已構建、組裝、接線和編程,我們需要投入大量時間進行測試,以模擬可能給機器人帶來問題的潛在場景。這時我們必須設身處地為客戶著想,并考慮可能發生問題的每一種可能情況。例如,如果操作員同時按下這 2 個按鈕,會發生什么情況?(這是人性。我們都知道我們喜歡按按鈕。)
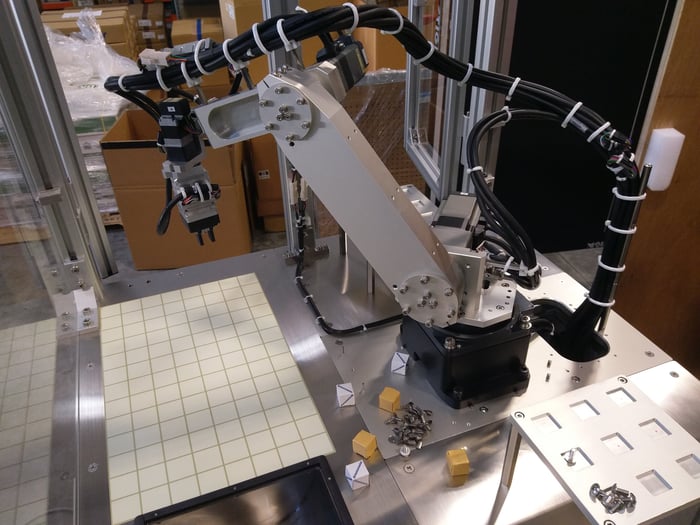
這是我們的 7 軸機械臂(取放機器人)的外觀。觀看下面的視頻,了解它在編程時是如何工作的。我們還在開發帶有新“迷你”驅動程序的新版機器人。以后請光臨我們的貿易展攤位,看看它的實際效果!
為了節省時間,我們為所有運動軸使用了同一系列的產品。Oriental Motor 已經包含獲得專利的內置多旋轉機械絕對位置傳感器,因此我們能夠非常快速地進行演示,而無需花費時間選擇、安裝、接線和測試任何傳感器或編碼器。< >AZ系列
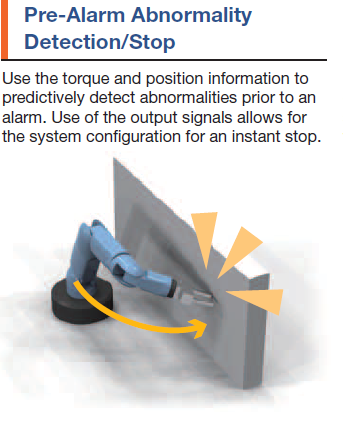
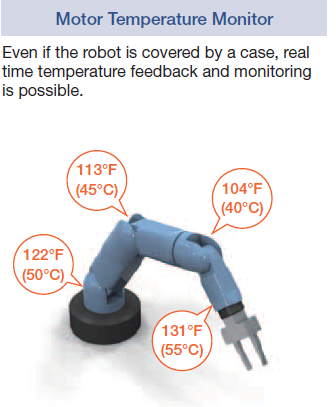
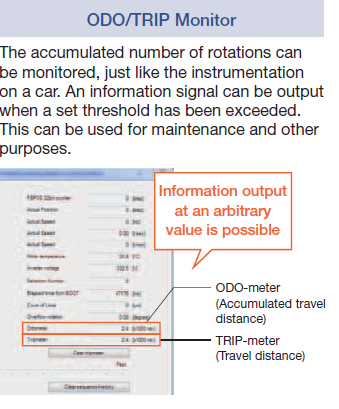
此外,AZ 系列閉環步進電機系統提供先進的內置功能,可簡化機器人的構建。
 |
 |
 |
我們為承載整個手臂的底部軸(黑色部分)選擇了高負載空心旋轉執行器。它的交叉滾子軸承擅長處理高負載,中空部分可用于將電纜穿過底柜。從軸 2 到軸 6,我們使用諧波減速機來處理增加的負載慣量并消除齒隙。在手臂的末端,我們連接了一個夾具組件,這樣它就可以拿起小盒子來演示拾取和放置功能。
這是電機組件的列表。AZ 系列有許多齒輪選項,這確實很有幫助,我們的線性和旋轉執行器也有相同的選項。確實有很多選擇可以滿足不同的要求。< >絕對位置控制技術< >Alphastep Hybrid Control 技術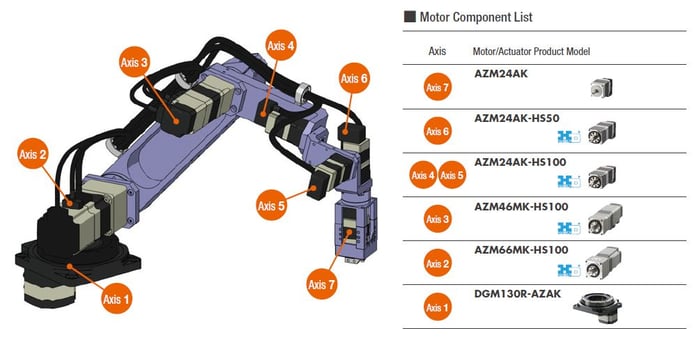
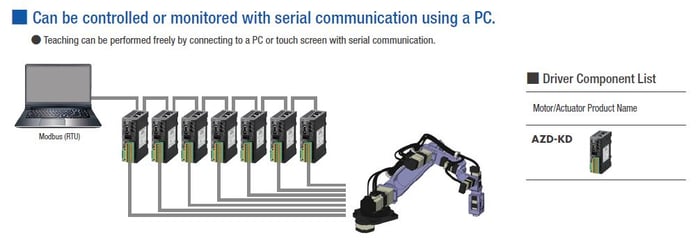
每個 AZ 系列電機都可以連接到提供不同功能以滿足不同需求的設備,例如能夠接受脈沖序列(或存儲運動數據)、能夠為多個軸提供動力或能夠與主機(HMI)通信、PLC 或 IPC)通過工業現場總線協議,如以太網/IP、EtherCAT 或 Modbus RTU。網絡網關也可用于其他協議。< >各種司機
驅動組件列表如下所示。請注意,只有一個部件號。一旦用專用電纜連接電機或執行器,驅動器就會自動識別電機的規格并設置參數,例如電流、分辨率和內部齒輪比。
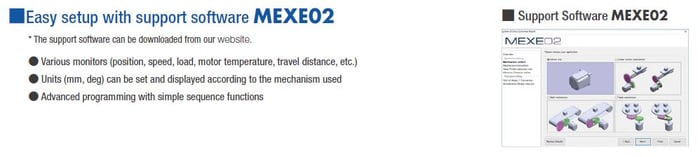
對軸進行編程非常簡單。與傳統的逐行編程不同,它提供了一個友好的 GUI 界面,只需要對運動配置文件進行編程(最多 256 個)。高級運動鏈接功能允許循環操作和條件語句,遠程狀態監控功能使預測性維護成為可能。 < >MEXE02支持軟件
恭喜你到了帖子的結尾。欣賞視頻!
更新:這是與我們最新的AlphaStep AZ 系列迷你驅動程序相同的演示!
< >
觀看更多。< >產品應用視頻
< >
< >了解有關 AlphaStep AZ 系列的更多信息
要了解有關#AlphaStep 的更多信息,請為您的團隊申請技術研討會或產品演示。
< >
發布評論請先 登錄
相關推薦
醫療機器人有哪些基本組成_醫療機器人有哪些功能
醫療機器人有哪些_醫療機器人有哪些應用
AMD贊助多支FIRST機器人競賽團隊

Al大模型機器人
工業機器人仿真軟件有哪些
基于FPGA EtherCAT的六自由度機器人視覺伺服控制設計
巡檢機器人有哪些功能和作用?

開年首秀 多可機器人攜“機器人+”無限應用強勢登陸
「喜報」邁步機器人榮獲機器人應用典型案例獎

機器人基于開源的多模態語言視覺大模型

自動打電話的機器人有哪些功能?

LabVIEW的六軸工業機器人運動控制系統
工業機器人產業發展及應用現狀






 工商網監
工商網監
評論