 純電動轎車三電匹配計算示例2
純電動轎車三電匹配計算示例2
3)峰值饋電時間的估算
峰值饋電時間由恒制動扭矩減速時間t1及恒功率減速時間t2及扭矩響應時間t0組成。由V=V0-at,車輛的最高車速120 km/h,a取2.5 m/s2,得到在恒制動扭矩區內最長減速時間:t1=V/a/3.6=13.3(s)。
扭矩響應時間t0取估值0.5 s,于是得到峰值饋電功率下,最長的饋電時間:T f≥t0+t1=13.8(s)。
1.2.2 電池放電倍率的匹配 (表3)
表3 電池放電倍率的匹配

2 電機參數匹配計算
主要包括電機峰值轉矩、功率及最高轉速的匹配。
2.1 電機峰值扭矩與減速比關系確定
2.1.1 路面附著允許的電機最大輸出扭矩
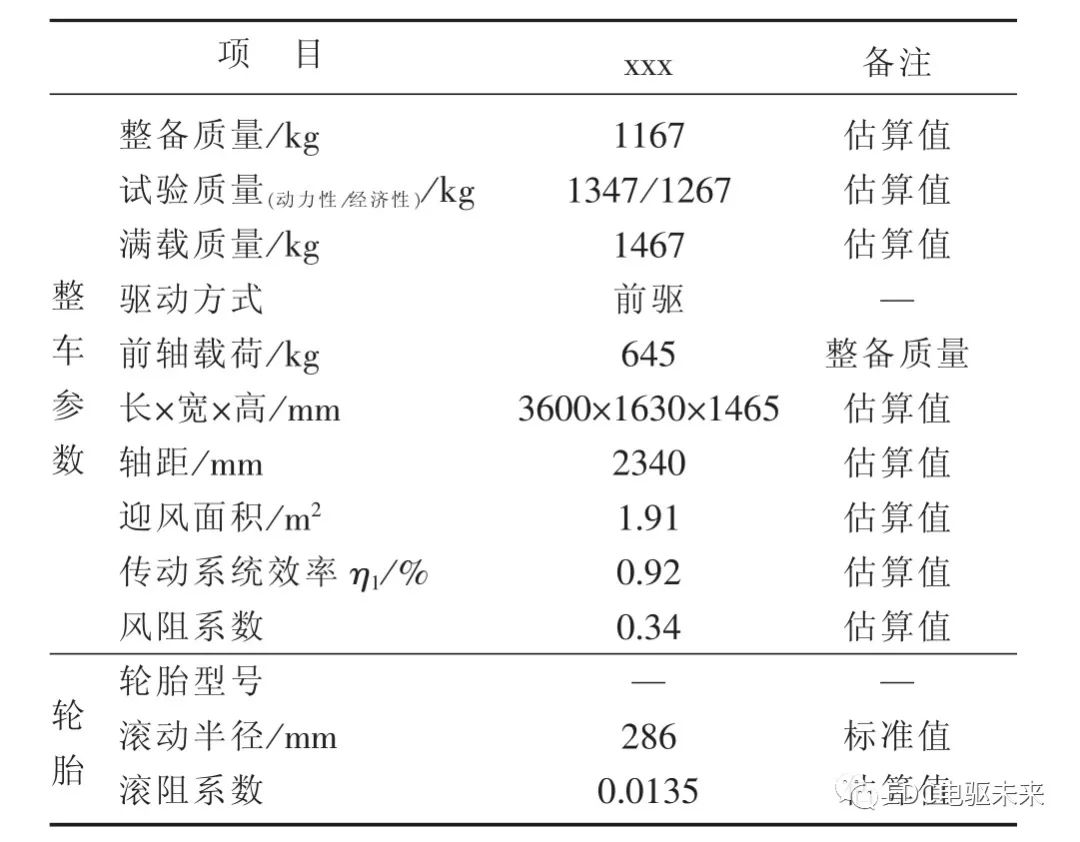
該車型為前輪驅動,由整車提供的前軸軸荷為m f=645 kg,附著系數取瀝青、水泥路面附著系數經驗值ε=0.8。
水平路面電機最大允許輸出扭矩:

最大爬坡度a=30%最大允許輸出扭矩:

2.1.2 滿足最大爬坡度的電機峰值扭矩
根據車輛在爬坡過程中的汽車行駛方程:F t=F f+F i+F w,可得到電機輸出扭矩關系式:
根據整車提供的設計參數,根據式 (14)可計算得到電機最大需求扭矩T m2max與電機轉速、減速器速比及爬坡度間的關系式:

取i=7.3時,通過賦值爬坡度,由式 (15)可得在爬坡車速為10 km/h,15 km/h,30 km/h變化條件下,車速對電機爬坡扭矩的影響率擬合曲線見圖3。


圖3 車速對電機爬坡扭矩的影響率擬合曲線
對圖3數據分析并結合式(15),并考慮到實際應用中最大爬坡度車速及減速比范圍、風阻對峰值扭矩的影響,因此式 (15) 可簡化為 (但實際計算扭矩還按照公式 (15)):

將整車設計要求最大爬坡度a=30%、爬行車速代入式(15)中,可得到滿足爬坡度a=30%的電機峰值扭矩需求與減速器速比的關系式:

2.2 電機最高轉速的匹配
2.2.1 減速器減速比的確定
由電機轉速n與車速v的關系式v=0.377×n×r×i-1 (km/h),整車設計最高車速V max=120 km/h,計算得到:

由式 (17),式 (18),獲得最高轉速與最大輸出扭矩與減速器速比間關系擬合曲線,見圖4。
2.2.2 電機最高轉速
根據電機最高轉速與減速器減速比的關系式,可得到滿足車輛最高車速120 km/h的電機的取整最高轉速:

考慮到車輛運行中的輪胎滑移,電機控制器轉速控制精度偏差范圍,確定電機最高轉速:N max=8500 r/min。
2.3 電機峰值扭矩的匹配
將減速器i=7.3,代入式 (18),可計算得到電機的取整峰值扭矩:T mmax=183 Nm。
考慮到控制的扭矩控制精度,車輛整備質量的偏差以及坡道啟動等影響因素,確定電機的最高扭矩為:T mmax=200 Nm。

圖4 不同速比下轉速與扭矩的擬合曲線

圖5 加速時間t1、t2與峰值功率關系擬合曲線

圖6 峰值扭矩與0-100 km/h加速時間擬合曲線
2.4 電機峰值功率匹配
2.4.1 滿足加速性能要求的匹配
電機峰值功率主要決定整車的加速性能設計要求。
由于電機的低速恒扭矩、高速恒功率輸出的特性,先計算電機基速與電機峰值功率P m1max間關系。
全油門加速過程的電機基速轉速:

式中:P m1max——電機峰值輸出功率,kW。
根據式 (20)及T mmax,I的值及車速與電機轉速關系式V=0.377×n×r/i,可計算得到該車的基速關系方程:

整車最短加速時間:

式中:t0——電機峰值扭矩響應時間,s;t1——恒扭矩區加速時間,s;t2——恒功率區加速時間,s。
根據整車提供的相關參數,整車質量取半載質量,同樣忽略電機轉速對最大扭矩的影響,由汽車行駛方程式F t=F f+F w+F i+F j推導出在恒扭矩區加速時間t1與峰值功率關系方程式:

同時,可確定恒功率區加速時間t與峰值功率、車速的關系方程式:

式中:V——整車設計最高車速,km/h;δ——旋轉質量換算系數,δ≈1.05;P max——電機的峰值功率。
由于電機峰值扭矩響應時間t0一般設計要求值小于0.5 s,取計算值t0=0.5 s。
由式 (23),式 (24)通過峰值功率賦值后,運用積分等計算可得到在不同功率下的恒扭矩加速時間t1及恒功率加速時間t2關系擬合曲線,見圖5。
由式 (21)可得到在不同電機峰值功率下與整車0-100 km/h加速時間t關系擬合曲線,見圖6。
由圖6可知,按整車0-100 km/h加速時間≤18 s的設計要求,電機峰值功率選取的范圍在50 kW左右。考慮到車輪實際運行中的阻滯及整車的經濟性,為滿足整車加速性能要求,確定初步選取電機功率為:P m2max=50 kW。
2.4.2 滿足市區循環工況的電機峰值功率匹配
在NEDC工況中,由于電機的額定功率均可滿足整車的勻速工況要求,而且加速時間短,考慮到經濟性,故僅在匹配電機峰值功率時考慮整車NEDC的加速工況。
由加速工況下,電機最大輸出功率P m2為車輛加速末電機勻速功率P1與電機加速功率P2之和。

式中:V末——加速過程中末速度,km/h。
根據整車提供的參數,計算滿足NEDC工況下電機最大峰值功率:P m3max=35.59 kW。
綜合1.2.1、2.4.1與2.4.2確定電機的峰值功率P mmax=Max(P m1max,P m2max,P m3max)=50 kW。
2.5 電機峰值轉速與額定功率匹配
2.5.1 電機的額定轉速由整車的經濟車速來確定
由電機的轉速n(r/min) 與整車的車速V (km/h) 的關系式:V=0.377×n×r/i/0.95。
將車輪滾動半徑r=0.286m,減速器速比i=7.3,整車設計經濟車速V=60 km/h代入上式,計算得到電機額定轉速:n e=4062 r/min,取整,選取電機的額定轉速為:n e=4100 r/min。
2.5.2 電機額定功率的匹配
電機的額定功率由車輛設計最高車速V max(30 min最高車速,單位km/h)和一定車速下持續爬坡車速確定。
由汽車的功率平衡方程可得到電機額定輸出功率P e(kW):

將a=0%,及整車相關設計參數代入式 (27),其中m取滿載質量,賦值車速,可得到電機輸出額定功率與最高車速間的關系擬合曲線,見圖7。

圖7 電機輸出功率與車速關系擬合曲線1
同樣,將整車設計爬坡度a=4%,其中m取滿載質量,代入式 (27),可得到爬坡度為4%時,電機輸出額定功率與最高車速間的關系擬合曲線,見圖8。

圖8 電機輸出功率與車速關系擬合曲線2
同樣,將整車設計爬坡度a=12%,其中m取滿載質量,代入式 (27),可得到爬坡度為12%時,電機輸出額定功率與最高車速間的關系擬合曲線,見圖9。

圖9 電機輸出功率與車速關系擬合曲線3
將整車設計爬坡度a=30%,其中m取滿載質量,代入式(27),可得到爬坡度為30%時,電機輸出額定功率與最高車速間的關系擬合曲線,見圖10。
由圖7可知,水平路面車輛勻速行駛最高車速120 km/h時,電機需要的輸出功率:P e1=23.05 kW。
由圖8可知,爬坡度為4%路面車輛勻速行駛最高車速60 km/h時,電機需要的輸出功率:P e2=15.93 kW。
由圖9可知,爬坡度為12%路面車輛勻速行駛最高車速30 km/h時,電機需要的輸出功率:P e3=17.51 kW。
由圖10可知,爬坡度為30%路面車輛勻速行駛最高車速15 km/h時,電機需要的輸出功率:P e4=20.03 kW。
根據整車的設計要求,計算電機的額定功率:P e=Max(P e1,P e2,P e3) =23.05 kW。
最后選擇,為滿足整車的設計要求,電機的額定功率取值為:P e=25 kW。
同理:根據1.2.1推理,如果電池包輸出電量是37 kWh(考慮放電效率),那么額定功率的放電倍率為:①(25/0.88+2.5)/37=0.84≈0.8 (考慮夏季雨夜);② (25/0.88+0.2)/35=0.82≈0.8(考慮試驗狀態)。

圖10 電機輸出功率與車速關系擬合曲線4
3 總結
針對設定的動力性指標和現有資源,電機、電池等總成參數匹配計算及總成結果見表4。
表4 電動車總成參數匹配計算及總成選型結果

參考文獻:
[1] GBT 28382-2012, 純電動乘用車技術條件[S].
[2] GB/T 18385-2005, 電動汽車動力性能試驗方法[S].
[3] GB/T 18386-2017,電動汽車能量消耗率和續航里程試驗方法[S].
-
電機
+關注
關注
142文章
8938瀏覽量
145125 -
純電動車
+關注
關注
0文章
159瀏覽量
14691 -
電池
+關注
關注
84文章
10473瀏覽量
129044
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論