 PWM調制的控制方式
PWM調制的控制方式
從調制到控制
在專題的上一篇中介紹了各種PWM調制的思路由來,以及衍生出一系列Buck的控制模式。
這一篇,我們將從這個思路延續,并對真實世界的產品一探究竟:各個廠家天花亂墜的控制名稱這么多,歸根結底都來源于什么。
亂花漸欲迷人眼
為了說清楚各種控制策略的本質,先來說明電壓模式控制,和電流模式控制的定義,和可能的所有情形。
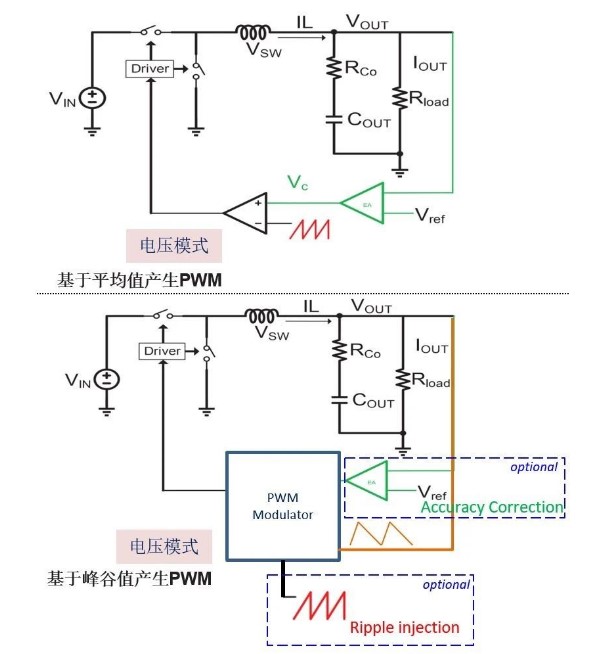
電壓模式(PWM由電壓信號調制產生)
通常情況下是單環的,區別僅在于是通過平均值比較(Average-Based)而產生PWM,還是通過紋波的峰谷值比較(Ripple-Based)產生PWM 。
因為峰谷值比較的緣故,輸出電壓的平均值和Vref參考值會有誤差,為了修正誤差提高精度,有時會增加含EA的電壓外環形成雙環控制,本文稱為“精度修正”(Accuracy Correction)。在文獻中,這種把Vo信息反饋給兩個不同地方的控制手段,叫作“V2 Control”。
當輸出電壓的ESR不能主導紋波時,通過額外的手段產生一個類似電感電流,或同相位于電感電流的波形,代替ESR信息參與控制,以確保控制邏輯的正常運行,避免次諧波震蕩。在文獻中,這種手段叫作“紋波注入”(Ripple Inejction)。
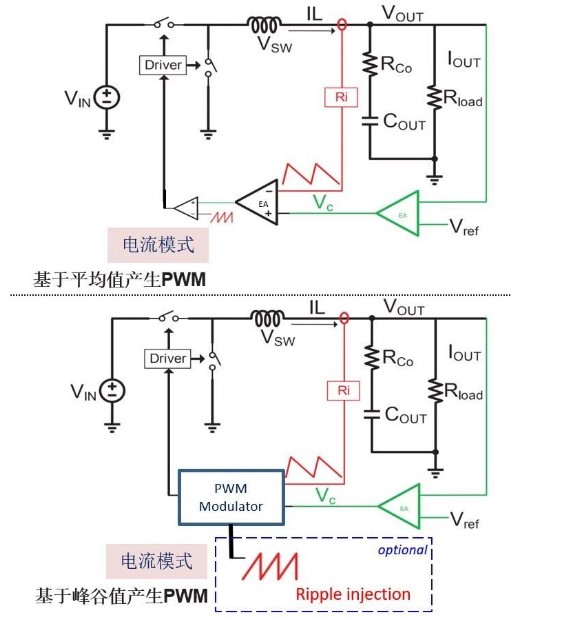
電流模式(PWM由電流信號調制產生)
雙環控制,區別僅在于是通過平均值比較(Average-Based)而產生PWM,還是通過紋波的峰谷值比較(Ripple-Based)產生PWM 。
電感電流的采樣,可以依據PWM基于峰值比較還是谷值比較,只采樣上管電流還是下管電流,甚至,只采樣峰值點還是谷值點。更特別的,可以不直接采樣回路里的電流,而類似紋波注入的思路,生成一個同相位的“虛擬電感電流”(Emulated Current)信息,代替真實的電流采樣,參與控制。
類似電壓控制模式,注入同相位的紋波可以提高控制邏輯的魯棒性。為了避免次諧波震蕩,有時同樣需要“紋波注入”(Ripple Inejction),比如峰值電流控制中的斜坡補償;另一方面,這樣做可提高PWM的抗擾性和穩定度(Noise Immunity, Jittering),也可據此調節環路小信號模型的特性。
淺草才能沒馬蹄
提到變頻的滯環和COT/FOT控制,以及偽定頻的自適應計時器做法。實際上,滯環控制也可以通過自適應的上下比較閾值實現偽定頻。下表中,把自適應的偽定頻調制方法加上"Adaptive"前綴。
接著,我們把提到的定頻PWM調制和PWM+PFM混合調制分為兩大類,然后依據本文介紹的電壓模式和電流模式再細分,對絕大部分的Buck控制模式進行分類。
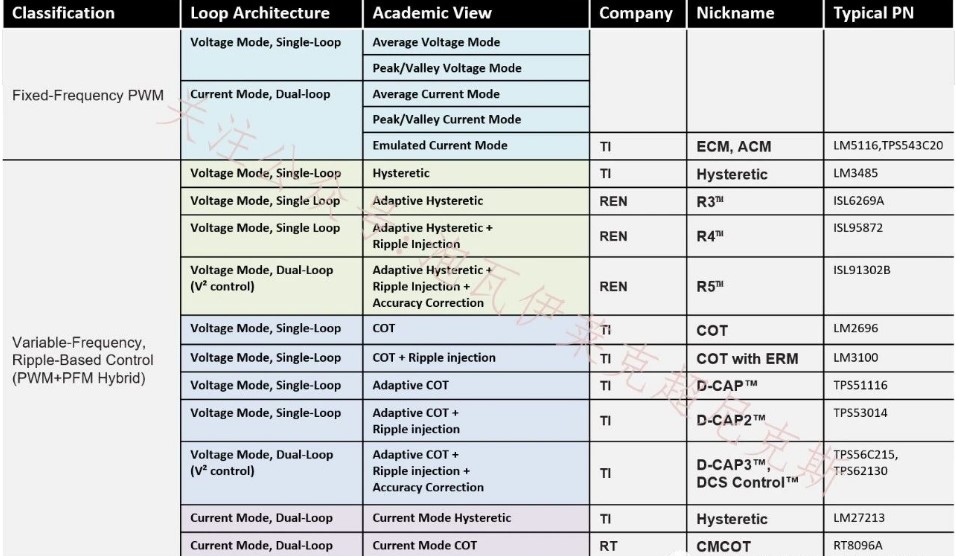
需要特別注意,標注出的公司和相應的控制策略,只是筆者個人認為的,該種控制思路的一個典型代表,并不意味著有且僅有這一廠家/這一系列采取了這種控制策略。
另外,自適應閾值/計時器的做法,虛擬電感電流的產生,紋波注入的方式,和修正精度用電壓外環的設計,每一家甚至每一個控制系列的細節實現,一定不盡相同,具體可參考如下各廠家的公開資料,和通過表中"Academic"關鍵詞檢索IEEE文獻學習。
最后,基于Buck的控制策略,絕大部分可以拓展到其他任何拓撲的控制研究中去,Paper就是這么來的。
-
調制
+關注
關注
0文章
156瀏覽量
29654 -
PWM
+關注
關注
114文章
5153瀏覽量
213456 -
控制方式
+關注
關注
0文章
55瀏覽量
10727 -
電流模式
+關注
關注
1文章
123瀏覽量
15957 -
電壓模式
+關注
關注
0文章
17瀏覽量
7913
發布評論請先 登錄
相關推薦







 工商網監
工商網監
評論