 應對現代大電流CPU電源設計的挑戰
應對現代大電流CPU電源設計的挑戰
英特爾?和AMD? CPU的性能在過去五年中大幅提高。性能的提高推動了為 CPU 供電的穩壓器的精密度和復雜性的增加。電源設計人員面臨的最大挑戰是跟上功率水平的提高、更嚴格的容差和更快的瞬態要求,同時降低電源的總體成本。本文探討了脈寬調制 (PWM)、多相操作和均流的簡史,以及一些有助于設計人員應對現代高功率 CPU 挑戰的最新技術進步。
不斷提高的性能要求和更嚴格的成本限制
下表顯示了 CPU 的性能在過去五年中是如何提高的。請注意,功率要求急劇增加,而電壓,特別是電壓容差下降。
| 特征 | 奔騰? III | 奔騰? 4 至尊版 |
| 推出年份 | 2000 | 2005 |
| 核心速度(赫茲) | 600米 | 3.73克 |
| 二級緩存 | 256K | 2米 |
| 前端總線速度(兆赫) | 100 | 1066 |
| 電壓 (V) | 1.75 | 1.30 |
| 電壓容差(mV) | +40/-80 | ±19 |
| 功率 (W) | 19.6 | 150 |
權力定義穩壓器的一個維度是它可以容納的“相位”或通道數。每相實際上可以提供25W至40W的功率,具體取決于可用空間和冷卻等因素。對于奔騰 3,單相穩壓器就足夠了,而當前一代的 CPU 需要 3 相或 4 相穩壓器。
電流平衡設計多相電源的一個挑戰是確保電流(功率)在相位之間正確共享。一相中明顯不成比例的電流會給組件帶來應力并降低其使用壽命。幾乎所有多相穩壓器都集成了電路,以主動平衡相之間的電流。
準確性CPU 電壓必須調節到極其嚴格的容差,才能在高時鐘頻率下工作。這些嚴格的公差必須在靜態和動態負載條件下保持。靜態精度是通過實現精確的片內基準電壓以及最小化失調電壓和偏置電流來實現的。動態精度受穩壓器控制環路帶寬和穩壓器輸出上使用的大容量電容量的影響。由于沒有穩壓器能夠即時響應CPU電流需求的突然變化,因此每種設計都需要大容量電容。穩壓器控制環路帶寬越高,它就能越早“趕上”CPU的需求,并補充大容量電容器提供的電流。
對CPU穩壓器的要求并非沒有成本。芯片面積和引腳數都隨著穩壓器容納的相數而增大。高精度基準電壓源需要復雜的設計和校準技術。用于電壓和電流檢測、基本電壓調節和有源均流的放大器必須設計為快速、低失調誤差和偏置電流,并且在整個工藝和溫度范圍內必須穩定。
也許大功率CPU穩壓器設計面臨的最重大挑戰是成本。在過去五年中,CPU內核穩壓器的每相價格下降了4倍或更多。
電源控制基礎
幾乎所有多相穩壓器都使用一種或另一種形式的PWM。大多數是固定頻率,時鐘啟動高端MOSFET的導通(參見Q你好圖1),并允許輸入電源為電感充電。
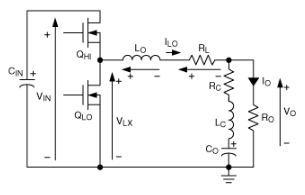
圖1.簡化的單相降壓穩壓器。
當控制環路確定是時候終止該“導通脈沖”時,高側MOSFET關斷,低側MOSFET導通(Q瞧),允許電感器放電到負載中。這種類型的PWM控制稱為后沿調制,因為前沿(高邊導通)是固定的(由內部時鐘),后沿(高邊關斷)根據控制環路和實時條件而變化。高端MOSFET相對于時鐘周期的時間百分比稱為占空比(D),等于Vout/Vin在穩態條件下。
電壓模式(見圖2)將輸出電壓(或其縮放版本)與固定的內部基準電壓進行比較。結果是誤差信號與固定的內部鋸齒(或斜坡)信號進行比較。斜坡信號與時鐘脈沖同步啟動,只要斜坡信號低于誤差電壓,PWM比較器的輸出就保持高電平。當斜坡信號穿過誤差電壓時,PWM比較器的輸出變為低電平,導通脈沖終止。電壓環路通過適當調節控制電壓(VC),因此占空比(圖3)。
圖2.簡化的電壓模式降壓穩壓器。
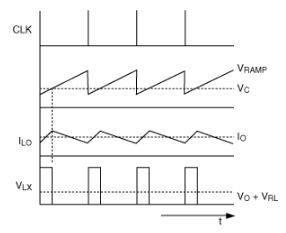
圖3.電壓模式波形。
峰值電流模式(見圖4)通過將電壓模式下使用的內部斜坡替換為電感中電流產生的斜坡,將電流信息添加到控制環路。與電壓模式一樣,固定頻率時鐘接通高端MOSFET,導致電感電流斜坡上升。當(標定的)峰值電感電流等于誤差電壓時,導通脈沖終止,高端MOSFET關斷。通過這種方法,有一個外部電壓環路和一個內部電流環路。外部電壓環路通過對內部電流環路測量的峰值電感電流進行適當編程來保持輸出電壓恒定。
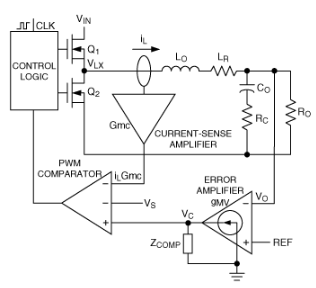
圖4.簡化的峰值電流模式降壓穩壓器。
權衡和注意事項
正如人們所期望的那樣,每種方法都有優點和缺點。以下段落將詳細討論這些因素,因為它們與電源設計人員必須考慮的因素有關。
抗噪性
電壓模式具有良好的抗噪性,因為在設計控制IC時,斜坡信號的幅度可以盡可能大。輸出電壓是唯一路由回控制器的敏感信號,因此電壓模式相對容易布局。
峰值電流模式要求除輸出電壓外,還要求將外部電流檢測信號路由回去。這是通過檢測負載電流路徑中的電阻來完成的(參見電流平衡)。為了將I2R損耗降至最低,電阻應盡可能小。因此,信號往往比電壓模式下產生的內部斜坡小一個數量級。必須注意確保信號不會被外部噪聲源破壞。實際上,峰值電流模式在當今非常普遍,使用標準的良好實踐進行布局并不難。
線路調節
電壓模式固有地響應輸入電壓的變化更慢。對輸入電壓變化的響應必須首先反映在輸出電壓的調節誤差中,而輸出電壓的調節誤差必須通過電壓反饋環路進行校正。因此,響應時間受控制環路帶寬的限制。大多數現代電壓模式穩壓器都集成了電路來檢測輸入電壓變化,并通過相應地調整其斜坡斜率來應用“前饋”。但是,這增加了控制器的復雜性。回想一下峰值電流模式下的占空比由電感電流斜坡控制,這是輸入和輸出電壓的函數,我們看到峰值電流模式在逐周期的基礎上提供固有的前饋。因此,對線路電壓變化的響應非常快。
電流平衡
由兩相或多相(多相)組成的穩壓器必須主動平衡相之間的電流,以防止一相處理不成比例的電流。每相電流檢測可以通過監視通過高端或低側MOSFET的電流,或通過放置在每相中的電流檢測電阻器的電流來實現。MOSFET方法價格低廉,因為它們利用了現有的電路元件,但它們不準確,因為MOSFET電阻隨工藝和溫度變化很大。檢流電阻方法可以非常精確,但會增加成本并降低電源轉換效率。
提取每相電流信息的另一種常用方法是使用電感的直流電阻(DCR)作為電流檢測元件。這種方法不會增加成本,因為它利用了現有的電路元件,并根據DCR容差提供合理的精度。在電感兩端增加了一個串聯電阻和電容,RC時間常數與L/DCR時間常數相匹配。在電容器上檢測到的電壓為通過電感器的電流提供了非常好的直流和交流表示。這種方法目前在電壓模式和電流模式CPU穩壓器中都非常常用。
電壓模式和電流模式如何使用這些信息使我們面臨另一種權衡。由于電壓模式僅使用控制環路中的電壓信息,因此無法控制每個電感中的單個相電流,這是電流平衡的要求。峰值電流模式提供自然均流,因為它利用電感電流信息作為控制方案的一部分。現代多相電壓模式穩壓器必須添加次級控制環路以提供電流平衡,這增加了IC的復雜性,并帶來了電壓定位和瞬態響應中討論的其他權衡。
雖然峰值電流模式確實提供了固有的均流,但有一個偽影會影響電流匹配精度。由于電感電流峰值是受控的,但不是電流谷值,因此兩相之間的電感不匹配(例如由于容差)都會產生具有不同峰峰值幅度的電感電流紋波信號。這會導致兩相之間的電流直流失配,從而影響相電流平衡的精度。
Maxim通過快速有源平均(RA2)技術解決了這一限制,該技術平均出每相的電感紋波電流。RA2電路(見圖5)在5至10個開關周期內“學習”每相的峰峰值紋波電流,然后將峰值電流信號偏置紋波電流的一半。由于峰值控制點已從電感電流峰值移動到直流電流點,因此我們仍然具有峰值電流模式控制的所有優點,但具有非常精確的直流電流匹配。由于RA2電路不是用于調節的電流環路的一部分,因此不會減慢瞬態響應。該技術用于專為英特爾VRD 8809.8810(和下一代VRD)和AMD K10插槽M1設計的MAX8A/MAX2A內核穩壓器。
圖5.RA2 算法的實現。
電壓定位和瞬態響應
當處理器負載突然變化時,現代 CPU 具有較大的電流瞬變。在這些苛刻的動態條件下,必須保持電壓容差,否則CPU容易鎖定。這可以通過確保足夠的大容量電容來吸收或提供CPU電流的突然變化來實現;然而,這會增加總體成本。
大多數大電流CPU內核穩壓器設計使用一種稱為電壓定位的技術來降低大容量電容要求。根據定義的斜率,允許輸出電壓隨著負載電流的增加而降低(下降)。電壓與電流的關系線有時稱為“負載線”,斜率指定為阻抗(例如1mΩ)。優點是在動態條件下增加電壓裕量,從而減少安全操作所需的大容量電容量。
忽略電壓定位考慮因素,電壓模式確實在電壓環路響應方面提供了理論優勢。理論環路帶寬是(輸出電壓)紋波頻率或每相開關頻率乘以相數的函數。在峰值電流模式下,電壓環路帶寬僅是每相開關頻率的函數,這是由于一種稱為“采樣效應”的現象。
然而,在電壓定位應用中存在實際差異。請記住,電壓模式控制需要第二個控制環路來實現電流平衡。環路帶寬通常設置為電壓環路帶寬的1/5至1/10,以防止對電壓環路的干擾,這對于電流平衡來說已經足夠了,因為通常只需要緩慢的調整。然而,對于電壓定位,響應負載瞬態的能力是電流環路帶寬的直接函數。對于電壓模式,這是相當低的(例如5kHz)。對于峰值電流模式,電流環路帶寬與電壓環路帶寬相同(例如50kHz至75kHz),因為只有一個環路同時使用電壓和電流信息。從圖6和圖7中的示波器鏡頭中很容易看出這對瞬態性能的影響。兩者都顯示了對 95A 負載階躍的響應,然后是 95A 負載釋放。
圖6.電壓模式瞬態響應(競爭產品)。
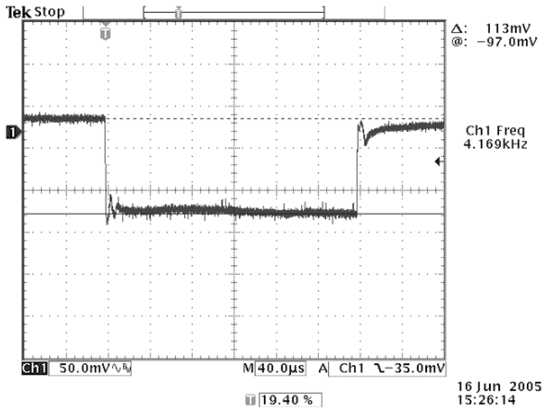
圖7.峰值電流模式瞬態響應(MAX8810A)。
穩壓器在如何實現電壓定位方面存在差異。電壓模式下的次級電流環路通常提供總平均電流信息。該信息(通常是縮放版本)通過電阻器強制設置失調電壓,該失調電壓施加于基準(所需輸出)電壓或實際(反饋)電壓。選擇電阻值以提供適當的負載線阻抗。
MAX8809A/MAX8810A采用不同的方法,使用有限增益主動設置輸出負載線(圖8)。
圖8.峰值電流模式控制,帶有源電壓定位(MAX8810A)。
誤差電壓的公式如下:
VC = gMV x RCOMP x (VDAC - VOUT)
其中 gMV是誤差放大器的增益,R比較是連接在誤差放大器輸出和地之間的電阻,VDAC是所需的輸出電壓,VOUT是實際輸出電壓。
同樣,PWM比較器反相輸入端的電壓為:
VC = (IOUT / N) x RSENSE x GCA
其中IOUT是輸出(CPU)負載電流,N是相數,RSENSE是電流檢測元件的值,GCA是電流檢測放大器增益。
在調節中,這兩個電壓必須相等。通過替換和一些重新排列,我們可以解決:
(VDAC - VOUT) / IOUT = (RSENSE x GCA) / (N x gMV x RCOMP)
術語(VDAC- VOUT) / IOUT是以前定義為負載線阻抗的內容。電流檢測增益(G加州)和誤差放大器的跨導(gMV) 是 IC 設計固定的常數;參數RSENSE和 N 由應用程序確定。因此,只需選擇適當的R值即可輕松設置負載線阻抗比較,用于設置電壓誤差放大器的增益。
環路補償
上述MAX8809A/MAX8810A電壓定位技術的美妙之處在于其簡單性。誤差放大器輸出端用于電壓定位的電阻也用于環路補償。峰值電流模式只需要單極補償即可消除大容量電容器及其ESR形成的零點。MAX8809A/MAX8810A只需要在電壓定位電阻上增加一個小值電容。電壓定位和環路補償相結合,可減少影響穩壓器輸出精度的誤差源。
由于調制器(控制環路)和輸出濾波器形成的極點和零點,電壓模式控制的補償更加復雜。電壓模式通常需要III型補償,這增加了小電阻和電容的數量。
溫度補償
使用電感DCR進行電流檢測的一個缺點是DCR根據銅的正溫度系數隨溫度變化。這直接影響電壓定位和限流保護的精度。
為了進行補償,設計使用具有相等但相反(負)溫度系數的電阻器——NTC。NTC通常是設置負載線阻抗的電阻網絡的一部分,可確保輸出電壓與電流的關系在工作溫度范圍內保持穩定。NTC在整個溫度范圍內不是線性的,因此電阻網絡必須包括兩個額外的電阻,以便在目標溫度范圍內線性化。
缺點是限流信息沒有溫度補償。室溫下的限流閾值必須向上縮放,以考慮較高溫度下電流信號的增加。在室溫下,電感器和MOSFET必須過大,以處理電流限制下的最大電流,這反過來又導致更高的解決方案成本。
MAX8809A/MAX8810A再次提供了創新技術的范例。這些穩壓器也使用NTC,但此信息的應用獨立于電壓定位電路。集成了線性化,節省了兩個電阻。然后,在內部使用經過溫度校正的電流信息進行電壓定位和電流限制。競爭產品通常需要第二個NTC來補償電流限制。MAX8809A/MAX8810A也使用相同的內部溫度信息來實現VRHOT功能,該信號表示穩壓器已超過一定溫度。因此,只需一個溫度檢測元件即可實現三種溫度功能,從而降低了總體成本。
結論
我們研究了穩壓器控制的基礎知識,包括兩種流行的方案,電壓模式和峰值電流模式,用于為現代CPU供電。每種方法都包括電源設計人員在大電流、多相設計環境中必須考慮的某些權衡。MAX8809A/MAX8810A內核穩壓器等產品的特性和技術通過RA2實現峰值電流模式控制,有助于簡化設計過程并降低總方案成本。請訪問計算機:臺式機、工作站、服務器概述,了解Maxim用于臺式PC和服務器應用的其他穩壓器解決方案的完整信息。
-
電源
+關注
關注
184文章
17605瀏覽量
249563 -
穩壓器
+關注
關注
24文章
4218瀏覽量
93644 -
cpu
+關注
關注
68文章
10829瀏覽量
211196 -
PWM
+關注
關注
114文章
5153瀏覽量
213456
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論