 如何選擇一個合適的工業機器人
如何選擇一個合適的工業機器人
01
應用場合
首先,最重要的源頭是評估導入的機器人,是用于怎樣的應用場合以及什么樣的制程。
若是應用制程需要在人工旁邊由機器協同完成,對于通常的人機混合的半自動線,特別是需要經常變換工位或移位移線的情況,以及配合新型力矩感應器的場合,協作型機器人(Cobots)應該是一個很好的選項。
如果是尋找一個緊湊型的取放(Pick& Place)料機器人,你可能想選擇一個水平關節型機器人(Scara)。
如果是尋找針對小型物件,快速取放的場合,并聯機器人(Delta)最適合這樣的需求。
接下來的討論,我們將針對垂直關節多軸機器人(Multi-axis)。這種機器人可以適應一個非常大范圍的應用。從取、放料到碼垛,以及噴涂,去毛刺,焊接等專用制程。現在,工業機器人制造商基本上針對每一種應用制程都有相應的機器人方案。你所做的只需要明確你希望機器人為你做哪個工作,以及從不同的種類當中,選擇最適合的型號。
02
**有效負載 **
有效負載是,機器人在其工作空間可以攜帶的最大負荷。從例如3Kg到1300Kg不等。
如果你希望機器人完成將目標工件從一個工位搬運到另一個工位,需要注意將工件的重量以及機器人手爪的重量加總到其工作負荷。
另外特別需要注意的是機器人的負載曲線,在空間范圍的不同距離位置,實際負載能力會有差異。
03
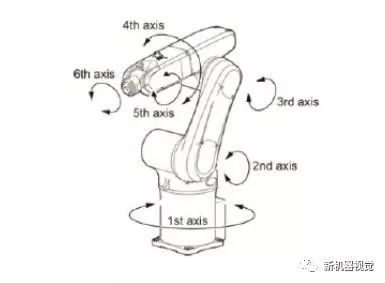
自由度(軸數)
機器人配置的軸數直接關聯其自由度。如果是針對一個簡單的直來直去的場合,比如從一條皮帶線取放到另一條,簡單的4軸機器人就足以應對。
但是,如果應用場景在一個狹小的工作空間,且機器人手臂需要很多的扭曲和轉動,6軸或7軸機器人將是最好的選擇。
軸數一般取決于該應用場合。應當注意,在成本允許的前提下,選型多一點的軸數在靈活性方面不是問題。這樣方便后續重復利用改造機器人到另一個應用制程,能適應更多的工作任務,而不是發現軸數不夠。
機器人制造商傾向于使用各自略有不同的軸或關節命名。基本上,第一關節(J1)是最接近機器人底座的那個。接下來的關節稱為J2,J3,J4和依此類推,直到到達手腕末端。而其他的Yaskawa/Motoman公司則使用字母命名他們機器人的軸。
04
最大作動范圍
當評估目標應用場合的時候,應該了解機器人需要到達的最大距離。選擇一個機器人不是僅僅憑它的有效載荷-也需要綜合考量它到達的確切距離。每個公司都會給出相應機器人的作動范圍圖,由此可以判斷,該機器人是否適合于特定的應用。 機器人的水平運動范圍,注意機器人在近身及后方的一片非工作區域。

機器人的最大垂直高度的量測是從機器人能到達的最低點(常在機器人底座以下)到手腕可以達到的的最大高度的距離(Y)。最大水平作動距離是從機器人底座中心到手腕可以水平達到的最遠點的中心的距離(X)。

05
重復精度
同樣的,這個因素也還是取決于你的應用場合。重復精度可以被描述為機器人完成例行的工作任務每一次到達同一位置的能力。
一般在±0.05mm到±0.02mm之間,甚至更精密。例如,如果需要你的機器人組裝一個電子線路板,你可能需要一個超級精密重復精度的機器人。如果應用工序是比較粗糙,比如打包,碼垛等,工業機器人也就不需要那么精密。
另外一方面,組裝工程的機器人精度的選型要求,也關聯組裝工程各環節尺寸和公差的傳遞和計算,比如:來料物料的定位精度,工件本身的在治具中的重復定位精度等。 這項指標從2D方面以正負 ± 表示。事實上,由于機器人的運動重復點不是線性的而是在空間3D運動,該參數的實際情況可以是在公差半徑內的球形空間內任何位置。
當然,現在的配合現在的機器視覺技術的運動補償,將減低機器人對于來料精度的要求和依賴,提升整體的組裝精度。
06
速度
這個參數與每一個用戶息息相關。事實上,它取決于在該作業需要完成的Cycle Time。規格表列明了該型號機器人最大速度,但我們應該知道,考量從一個點到另一個點的加減速,實際運行的速度將在0和最大速度之間。這項參數單位通常以度/秒計。有的機器人制造商也會標注機器人的最大加速度。
07
本體重量
機器人本體重量是設計機器人單元時的一個重要因素。如果工業機器人必須安裝在一個定制的機臺,甚至在導軌上,你可能需要知道它的重量來設計相應的支撐。
08
剎車和轉動慣量
基本上每個機器人制造商提供他們的機器人制動系統的信息。有些機器人對所有的軸配備剎車,其他的機器人型號不是所有的軸都配置剎車。要在工作區中確保精確和可重復的位置,需要有足夠數量的剎車。
另外一種特別情況,意外斷電發生的時候,不帶剎車的負重機器人軸不會鎖死,有造成意外的風險。
同時,某些機器人制造商也提供機器人的轉動慣量。其實,對于設計的安全性來說,這將是一個額外的保障。你可能還注意到不同軸上的適用的扭矩。例如,如果你的動作需要一定量的扭矩以正確完成工作,你需要檢查,在該軸上適用的最大扭矩是否正確的。如果選型不正確,機器人則可能由于過載而Down機。
09
防護等級
根據機器人的使用環境,選擇達到一定的防護等級(IP等級)的標準。一些制造商提供相同的機械手針對不同的場合不同的IP防護等級的產品系列。 如果機器人在與生產食品相關的產品,醫藥、醫療器具,或易燃易爆的環境中工作時,IP等級會有所不同。一般如,標準:IP40,油霧:IP67,清潔ISO等級:3。
-
機器人
+關注
關注
209文章
27720瀏覽量
203681 -
感應器
+關注
關注
3文章
250瀏覽量
20811 -
協作機器人
+關注
關注
2文章
477瀏覽量
30011
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論