") 焊接機(jī)器人主要工作原理
焊接機(jī)器人主要工作原理
現(xiàn)在廣泛應(yīng)用的焊接機(jī)器人都屬于第一代工業(yè)機(jī)器人,它的基本工作原理是示教再現(xiàn)。示教也稱導(dǎo)引,即由用戶導(dǎo)引機(jī)器人,一步步按實(shí)際任務(wù)操作一遍,機(jī)器人在導(dǎo)引過程中自動(dòng)記憶示教的每個(gè)動(dòng)作的位置、姿態(tài)、運(yùn)動(dòng)參數(shù)\工藝參數(shù)等,并自動(dòng)生成一個(gè)連續(xù)執(zhí)行全部操作的程序。完成示教后,只需給機(jī)器人一個(gè)啟動(dòng)命令,機(jī)器人將精確地按示教動(dòng)作,一步步完成全部操作。這就是示教與再現(xiàn)。
實(shí)現(xiàn)上述功能的主要工作原理,簡述如下:
- 機(jī)器人的系統(tǒng)結(jié)構(gòu) 一臺(tái)通用的工業(yè)機(jī)器人,按其功能劃分,一般由 3 個(gè)相互關(guān)連的部分組成:機(jī)械手總成、控制器、示教系統(tǒng),如圖 1 所示。
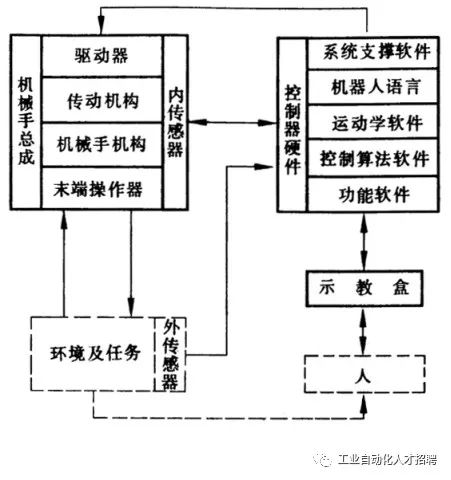
圖 1 工業(yè)機(jī)器人的基本結(jié)構(gòu)
機(jī)械手總成是機(jī)器人的執(zhí)行機(jī)構(gòu),它由驅(qū)動(dòng)器、傳動(dòng)機(jī)構(gòu)、機(jī)器人臂、關(guān)節(jié)、末端操作器、以及內(nèi)部傳感器等組成。它的任務(wù)是精確地保證末端操作器所要求的位置,姿態(tài)和實(shí)現(xiàn)其運(yùn)動(dòng)。
控制器是機(jī)器人的神經(jīng)中樞。它由計(jì)算機(jī)硬件、軟件和一些專用電路構(gòu)成,其軟件包括控制器系統(tǒng)軟件、機(jī)器人專用語言、機(jī)器人運(yùn)動(dòng)學(xué)、動(dòng)力學(xué)軟件、機(jī)器人控制軟件、機(jī)器人自診斷、白保護(hù)功能軟件等,它處理機(jī)器人工作過程中的全部信息和控制其全部動(dòng)作。
示教系統(tǒng)是機(jī)器人與人的交互接口,在示教過程中它將控制機(jī)器人的全部動(dòng)作,并將其全部信息送入控制器的存儲(chǔ)器中,它實(shí)質(zhì)上是一個(gè)專用的智能終端。
(2) 機(jī)器人手臂運(yùn)動(dòng)學(xué) 機(jī)器人的機(jī)械臂是由數(shù)個(gè)剛性桿體由旋轉(zhuǎn)或移動(dòng)的關(guān)節(jié)串連而成,是一個(gè)開環(huán)關(guān)節(jié)鏈,開鏈的一端固接在基座上,另一端是自由的,安裝著末端操作器 ( 如焊槍 ) ,在機(jī)器人操作時(shí),機(jī)器人手臂前端的末端操作器必須與被加工工件處于相適應(yīng)的位置和姿態(tài),而這些位置和姿態(tài)是由若干個(gè)臂關(guān)節(jié)的運(yùn)動(dòng)所合成的。因此,機(jī)器人運(yùn)動(dòng)控制中,必須要知道機(jī)械臂各關(guān)節(jié)變量空間和末端操作器的位置和姿態(tài)之間的關(guān)系,這就是機(jī)器人運(yùn)動(dòng)學(xué)模型。一臺(tái)機(jī)器人機(jī)械臂幾何結(jié)構(gòu)確定后,其運(yùn)動(dòng)學(xué)模型即可確定,這是機(jī)器人運(yùn)動(dòng)控制的基礎(chǔ)。
**機(jī)器人手臂運(yùn)動(dòng)學(xué)中有兩個(gè)基本問題。 **
- 對給定機(jī)械臂,己知各關(guān)節(jié)角矢量 g(f)=[gl(t) ,g2(t) ,...... gn(i)] ',其中 n 為自由度。求末端操作器相對于參考坐標(biāo)系的位置和姿態(tài),稱之為運(yùn)動(dòng)學(xué)正問題。在機(jī)器人示教過程中。機(jī)器人控制器即逐點(diǎn)進(jìn)行運(yùn)動(dòng)學(xué)正問題運(yùn)算。
- 對給定機(jī)械臂,已知末端操作器在參考坐標(biāo)系中的期望位置和姿態(tài),求各關(guān)節(jié)矢量,稱之為運(yùn)動(dòng)學(xué)逆問題。在機(jī)器人再現(xiàn)過程中,機(jī)器人控制器即逐點(diǎn)進(jìn)行運(yùn)動(dòng)學(xué)逆問題運(yùn)算,將角矢量分解到機(jī)械臂各關(guān)節(jié)。
運(yùn)動(dòng)學(xué)正問題的運(yùn)算都采用 D-H 法,這種方法采用 4X4 齊次變換矩陣來描述兩個(gè)相鄰剛體桿件的空間關(guān)系,把正問題簡化為尋求等價(jià)的 4X4 齊次變換矩陣。逆問題的運(yùn)算可用幾種方法求解,最常用的是矩陣代數(shù)、迭代或幾何方法 ob 在此不作具體介紹,可參考文獻(xiàn) [1]。對于高速、高精度機(jī)器人,還必須建立動(dòng)力學(xué)模型, 由于目前通用的工業(yè)機(jī)器人 ( 包括焊接機(jī)器人 ) 最大的運(yùn)動(dòng)速度都在 3m / s 內(nèi),精度都不高于 O.1mm ,所以都只做簡單的動(dòng)力學(xué)控制,動(dòng)力學(xué)的計(jì)算方法可參考文獻(xiàn)正 [1 ~ 3] 。
(3) 機(jī)器人軌跡規(guī)劃 機(jī)器人機(jī)械手端部從起點(diǎn) ( 包括,位置和姿態(tài) ) 到終點(diǎn)的運(yùn)動(dòng)軌跡空間曲線叫路徑,軌跡規(guī)劃的任務(wù)是用一種函數(shù)來“內(nèi)插”或“逼近”給定的路徑,并沿時(shí)間軸產(chǎn)生一系列“控制設(shè)定點(diǎn)”,用于控制機(jī)械手運(yùn)動(dòng)。
目前常用的軌跡規(guī)劃方法有關(guān)節(jié)變量空間關(guān)節(jié)插值法和笛卡爾空間規(guī)劃兩種方法。具體算法可參考文獻(xiàn) [1 ,4] 。
(4) 機(jī)器人機(jī)械手的控制 當(dāng)一臺(tái)機(jī)器人機(jī)械手的動(dòng)態(tài)運(yùn)動(dòng)方程已給定。它的控制目的就是按預(yù)定性能要求保持機(jī)械手的動(dòng)態(tài)響應(yīng)。但是由于機(jī)器人機(jī)械手的慣性力、耦合反應(yīng)力和重力負(fù)載都隨運(yùn)動(dòng)空間的變化而變化,因此要對它進(jìn)行高精度乙斗高速、高動(dòng)態(tài)晶質(zhì)的控制是相當(dāng)復(fù)雜而困難的,現(xiàn)在正在為此研究和發(fā)展許多新的控制方法。
目前工業(yè)機(jī)器人上采用的控制方法是把機(jī)械手上每一個(gè)關(guān)節(jié)都當(dāng)作一個(gè)單獨(dú)的伺服機(jī)構(gòu),即把一個(gè)非線性的、關(guān)節(jié)間耦合的變負(fù)載系統(tǒng),簡化為線性的非耦合單獨(dú)系統(tǒng)。每個(gè)關(guān)節(jié)都有兩個(gè)伺服環(huán),機(jī)械手伺服控制系統(tǒng)見圖 2 外環(huán)提供位置誤差信號,內(nèi)環(huán)由模擬器件和補(bǔ)嘗器 ( 具有衰減速度的微分反饋 ) 組成,兩個(gè)伺服環(huán)的增益是固定不變的。因此基本上是一種比例積分微分控制方法 (PID 法 ) 。這種控制方法,只適用于目前速度、精度要求不高和負(fù)荷不大的機(jī)器人控制,對常規(guī)焊接機(jī)器人來說,已能滿足要求 。

圖 2 機(jī)械手伺服控制體系結(jié)構(gòu)
(5) 機(jī)器人編程語言 機(jī)器人編程語言是機(jī)器人和用戶的軟件接口,編程語言的功能決定了機(jī)器人的適應(yīng)性和給用戶的方便性,至今還沒有完全公認(rèn)的機(jī)器人編程語言,每個(gè)機(jī)器人制造廠都有自己的語言。
實(shí)際上,機(jī)器人編程與傳統(tǒng)的計(jì)算機(jī)編程不同,機(jī)器人操作的對象是各類三維物體,運(yùn)動(dòng)在一個(gè)復(fù)雜的空間環(huán)境,還要監(jiān)視和處理傳感器信息。因此其編程語言主要有兩類:面向機(jī)器人的編程語言和面向任務(wù)的編程語言。
面向機(jī)器人的編程語言的主要特點(diǎn)是描述機(jī)器人的動(dòng)作序列,每一條語句大約相當(dāng)于機(jī)器人的一個(gè)動(dòng)作,整個(gè)程序控制機(jī)器入完種:
- 專用的機(jī)器人語言,如 PUMA 機(jī)器人的 VAL 語言,是專用的機(jī)器人控制語言,它的最新版本是 VAL-I 和 V+ ·······。
- 在現(xiàn)有計(jì)算機(jī)語言的基礎(chǔ)上加機(jī)器人子程序庫。如美國機(jī)器人公司開發(fā)的 AR — Basic 和 Intelledex 公司的 Robot — Basic 語言,都是建立在 BASIC 語言上的。
- 開發(fā)一種新的通用語言加上機(jī)器人子程序庫。如 IBM 公司開發(fā)的 AML 機(jī)器人語言。
面向任務(wù)的機(jī)器人編程語言允許用戶發(fā)出直接命令,以控制機(jī)器人去完成一個(gè)具體的任務(wù),而不需要說明機(jī)器人需要采取的每一個(gè)動(dòng)作的細(xì)節(jié)。如美國的 RCCL 機(jī)器人編程語言,就是用 C 語言和一組 C 函數(shù)來控制機(jī)器人運(yùn)動(dòng)的任務(wù)級機(jī)器人語言。
焊接機(jī)器人的編程語言,目前都屬于面向機(jī)器人的語言,面向任務(wù)的機(jī)器人語言尚屬開發(fā)階段。大都是針對裝配作業(yè)的需要。
-
控制器
+關(guān)注
關(guān)注
112文章
16203瀏覽量
177403 -
機(jī)器人
+關(guān)注
關(guān)注
210文章
28205瀏覽量
206522 -
工業(yè)機(jī)器人
+關(guān)注
關(guān)注
91文章
3351瀏覽量
92558 -
焊接機(jī)器人
+關(guān)注
關(guān)注
16文章
319瀏覽量
14916
發(fā)布評論請先 登錄
相關(guān)推薦
焊接機(jī)器人的結(jié)構(gòu)組成是什么?
焊接傳感器一款轉(zhuǎn)為焊接機(jī)器人而設(shè)計(jì)的焊縫跟蹤傳感器
焊接機(jī)器人的結(jié)構(gòu)與原理
工業(yè)焊接機(jī)器人實(shí)訓(xùn)平臺(tái)介紹
焊接機(jī)器人及其應(yīng)用
焊接機(jī)器人編程人員的工作內(nèi)容
焊接機(jī)器人的工作原理
焊接機(jī)器人主要有哪些種類?
焊接機(jī)器人編程方法及流程技巧
焊接機(jī)器人如何進(jìn)行焊縫追蹤?
詳細(xì)介紹焊接機(jī)器人的工作原理是什么?

焊接機(jī)器人的驅(qū)動(dòng)方式有哪些?
焊接機(jī)器人編程方法及流程技巧
焊接機(jī)器人的工作原理與優(yōu)勢分析






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論