 飛機震動槳頻分析
飛機震動槳頻分析
由于無人機通過加速度計、陀螺儀等慣性傳感器來測量自身的導航信息,而機體振動,會影響加速度計、陀螺儀等慣性傳感器的測量,使得測量噪聲加大,進而影響控制效果。
振動的分析主要通過原始傳感器的數值來看。通過DataViewer查看原始的加速度計信息,如下圖1所示,也可以查看原始的陀螺儀輸出,如下圖2 所示。如果加速度計的輸出,噪聲的峰峰值超過了5g(即5000mg),或者陀螺儀的噪聲超過了50°/s(即872mrad),則應該考慮改進機架結構,降低機架振動水平以改善飛行性能。
值得注意的是,飛機的振動主要集中在加速度計的z軸和陀螺儀的x、y軸,因此需要分析無人機的振動特性主要觀察上述三個軸的輸出值。
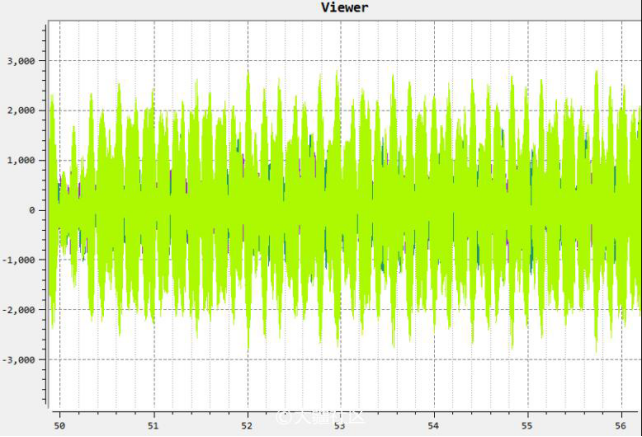
圖1:三軸陀螺儀原始輸出(只有獨立飛控開放了這個數據查看,下同)
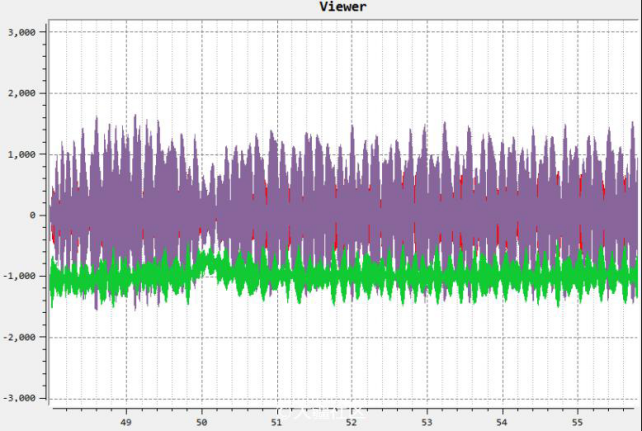
圖2:三軸加速度計原始數據
無人機的機體高頻振動主要來源為電機的轉動,所以對于電機轉速或螺旋槳的轉動頻率的分析尤其重要,槳頻即指螺旋槳的轉動頻率。對于槳頻的分析主要借助快速傅里葉變換工具(FFT)來實現,首先將原始陀螺儀數據畫到繪圖區,然后點選FFT工具,并使用鼠標左鍵點選后不放,使用矩形區域選定需要做FFT分析的曲線區域,接著分析結果就會出現在新的標簽頁中。

如下圖示。可以看到在76Hz左右出現了一個峰值,在150Hz出現了第二個峰值,它們分別是一倍槳頻點與二倍槳頻點,通常第一個峰值為槳頻的頻率點,即76Hz。
通過對加速度計原始數據做FFT也可以得到槳頻信息,如圖所示。
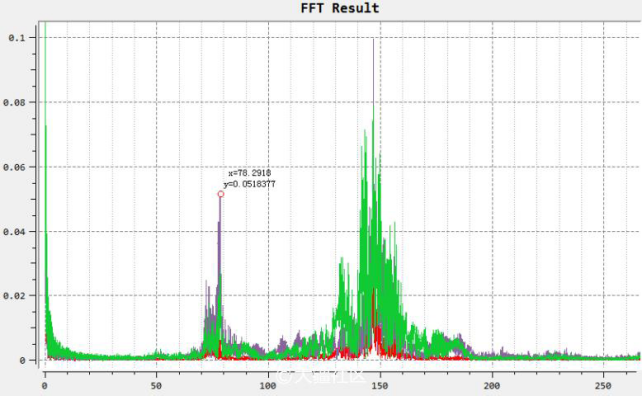
加速度計原始數據FFT
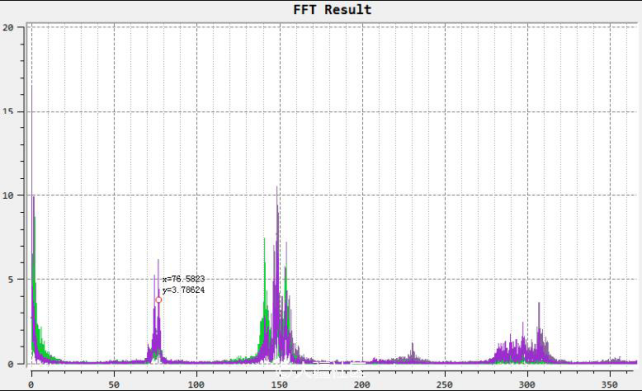
陀螺儀原始數據FFT
槳頻對于飛行品質有一定影響。建議槳頻不低于40Hz,否則會造成控制器對于低頻噪聲衰減不足,在控制效果上變現為無人機抽動、振動等問題。
機架震動主要來源于:
(1)機架柔性。①機架的柔性是震動的來源之一,過于柔軟的機架會引入更多震動,因此機架應該盡可能的保持剛性。碳纖維機架具有較好的抗扭矩和抗彎曲特性,是較為理想的機架材質選擇。②機臂與中心板的連接處應盡可能保持剛性,連接牢固,且不要留有活動間隙。
(2)電機。①電機與電機座的連接處應盡可能保持剛性,連接牢固,且不要留有活動間隙。②電機座與機臂的連接處應盡可能保持剛性,連接牢固,且不要留有活動間隙。
③電機的動平衡性能要好,空載旋轉時應運行平穩。
(3)螺旋槳。①螺旋槳與電機軸的連接處應盡可能保持剛性,連接牢固,電機軸與槳平面盡可能保持垂直,且不要留有活動間隙。②螺旋槳的平衡性要好,對于兩葉槳應能夠在螺旋槳平衡器上保持平衡。大尺寸螺旋槳引起的震動比小尺寸螺旋槳要大,因此在大尺寸飛行器中要特別注意機械減震。
審核編輯 :李倩
-
傳感器
+關注
關注
2548文章
50681瀏覽量
752021 -
陀螺儀
+關注
關注
44文章
779瀏覽量
98579 -
電機
+關注
關注
142文章
8933瀏覽量
145100
原文標題:飛機震動槳頻分析
文章出處:【微信號:雨飛工作室,微信公眾號:雨飛工作室】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
飛機飛行原理
全新認識 震動/振動測試
油液分析技術怎么監測飛機的安全?
步進電機低頻震動的問題
采用DSP的實時震動信號分析處理系統設計原理
變槳驅動電機低頻輸出優化控制

探討震動對系統設計的影響分析
開放式和管道式螺旋槳結構的對比
飛機的飛行原理和結構動態圖
精密震動馬達的特點及應用分析

震動馬達在手表中的應用分析

游戲手柄震動馬達的技術特點分析






 工商網監
工商網監
評論