") 一種更好的BLDC電機(jī)通信方法
一種更好的BLDC電機(jī)通信方法
無刷直流 (BLDC) 電機(jī)是一種采用直流電源并通過外部電機(jī)控制器控制實(shí)現(xiàn)電子換向的電機(jī)。不同于有刷電機(jī),BLDC 依靠外部控制器實(shí)現(xiàn)換向,也就是在電機(jī)相上切換電流以產(chǎn)生運(yùn)動(dòng)的過程。有刷電機(jī)具有實(shí)際的電刷,其每旋轉(zhuǎn)一圈可實(shí)現(xiàn)兩次換向過程,而 BLDC 電機(jī)則無電刷。由于自身的設(shè)計(jì)特性,無刷電機(jī)能夠?qū)崿F(xiàn)任意數(shù)量的換向磁極對(duì)。本文將回顧 BLDC 電機(jī)的基礎(chǔ)知識(shí),探討其常見換向方法并介紹一種采集位置反饋信息的新解決方案。
BLDC電動(dòng)機(jī)換向的基礎(chǔ)知識(shí)
最常見的 BLDC 電機(jī)采用 3 相配置。相數(shù)與定子繞組數(shù)相匹配,而轉(zhuǎn)子磁極數(shù)根據(jù)應(yīng)用需求的不同可以是任意數(shù)量對(duì)。因?yàn)?BLDC 電機(jī)的轉(zhuǎn)子受旋轉(zhuǎn)的定子磁極影響,所以須追蹤定子磁極位置,以有效驅(qū)動(dòng)三個(gè)電機(jī)相。為此,需使用電機(jī)控制器在三個(gè)電機(jī)相上生成六步換向模式。這六步(或換向相)移動(dòng)電磁場(chǎng),進(jìn)而使轉(zhuǎn)子永磁體推動(dòng)電機(jī)軸(圖 1)。
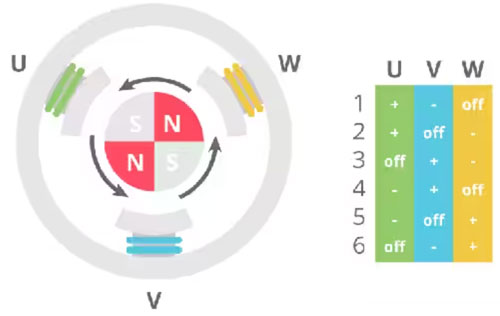
圖 1:BLDC 電機(jī)的 6 步換向模式:(圖片來源:CUI Devices)
為了使控制器能夠有效地使電機(jī)換向,控制器必須始終獲得關(guān)于轉(zhuǎn)子位置的準(zhǔn)確信息。自無刷電機(jī)誕生以來,霍爾效應(yīng)傳感器就一直是換向反饋的熱門選擇。在典型情況下,3 相控制需要三個(gè)傳感器。電機(jī)定子中嵌入了檢測(cè)轉(zhuǎn)子位置的霍爾效應(yīng)傳感器,這樣就可以切換三相電橋中的晶體管來驅(qū)動(dòng)電機(jī)。三個(gè)霍爾效應(yīng)傳感器的輸出一般標(biāo)記為 U、V 和 W 通道。遺憾的是,這種位置反饋法有一些缺點(diǎn)。雖然霍爾效應(yīng)傳感器的 BOM 成本很低,但將這些傳感器集成到 BLDC 中的成本可能是電機(jī)總成本的兩倍。此外,控制器只能從霍爾效應(yīng)傳感器獲得電機(jī)位置的部分信息,這在需要精確位置反饋才能正常運(yùn)行的系統(tǒng)中會(huì)造成問題。
編碼器可提供更高的精度
在當(dāng)今世界,需要無刷直流電動(dòng)機(jī)的系統(tǒng)對(duì)位置測(cè)量精度的要求遠(yuǎn)遠(yuǎn)高于以往。為此,除了霍爾效應(yīng)傳感器外,可將增量編碼器可與無刷直流電機(jī)配對(duì)使用。這就給出了一個(gè)具有改進(jìn)型位置反饋的系統(tǒng),但現(xiàn)在需要電機(jī)制造商在電機(jī)中添加兩個(gè)霍爾傳感器,以及在裝配后增加一個(gè)增量編碼器。更好的選擇是忽略霍爾效應(yīng)傳感器,用換向編碼器取代增量編碼器。換向編碼器具有用于精確位置跟蹤的增量輸出,以及與電機(jī)的特定磁極配置相匹配的換向輸出,這類器件如 CUI Devices 的 AMT31 或 AMT33 系列器件。CUI Devices 的換向編碼器是數(shù)字式器件,可以對(duì)這些參數(shù)(包括極數(shù)、分辨率和方向)進(jìn)行編程。這樣,工程師就能靈活地進(jìn)行原型開發(fā)和測(cè)試,減少多設(shè)計(jì)中的編碼器 SKU 數(shù)量。
對(duì)齊換向電機(jī)
當(dāng)在電機(jī)上施加電流時(shí),電機(jī)會(huì)旋轉(zhuǎn),反之,當(dāng)旋轉(zhuǎn)電機(jī)時(shí),就會(huì)產(chǎn)生電流。如果旋轉(zhuǎn)無刷直流電動(dòng)機(jī),我們會(huì)看到 3 相的輸出與以下圖 2 所示類似。為使換向編碼器,甚至霍爾效應(yīng)傳感器與無刷直流電動(dòng)機(jī)正確對(duì)齊,所產(chǎn)生的換向波形應(yīng)與反電動(dòng)勢(shì)對(duì)齊。傳統(tǒng)上,這將導(dǎo)致一個(gè)反復(fù)過程,需要用第二臺(tái)電機(jī)來驅(qū)動(dòng)第一臺(tái)電機(jī),并需要用示波器觀察波形。這可能會(huì)耗費(fèi)時(shí)間,并增加大制造成本。
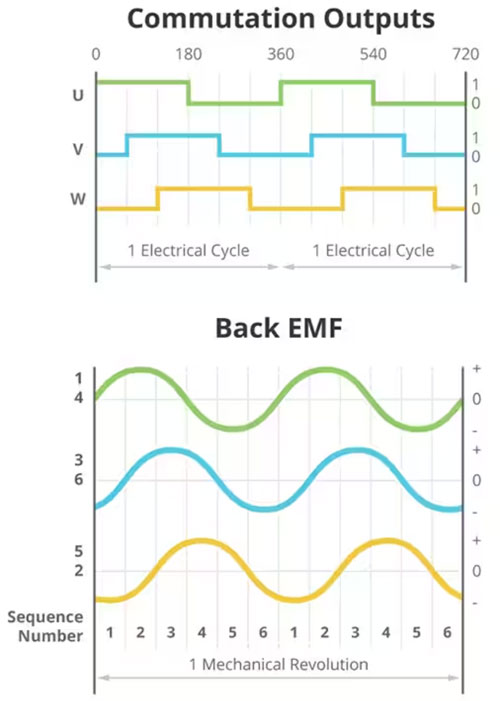
圖 2:換向輸出和電機(jī)相位(圖片來源:CUI Devices)
使用 AMT 容式編碼器幾乎能實(shí)現(xiàn)瞬時(shí)對(duì)齊,且只需要一個(gè)電源。安裝編碼器后,用戶只需向?qū)?yīng)于 AMT 編碼器所需起始位置的那兩相供電,并發(fā)出對(duì)齊命令。這樣做,用戶就從根本上設(shè)定了編碼器的換向波形和電機(jī)反電動(dòng)勢(shì)波形的起始位置。
除了易于對(duì)齊之外,AMT 編碼器的換向信號(hào)與電機(jī)磁極的對(duì)齊也更加精確。將換向編碼器對(duì)齊電機(jī),只是設(shè)置了起始位置(即換向波形的起始位置)。如果操作適當(dāng),換向波形應(yīng)與電機(jī)的反電動(dòng)勢(shì)波形完全匹配。然而,這總情況并不是總能實(shí)現(xiàn)的。使用霍爾傳感器或光學(xué)編碼器的典型對(duì)齊范圍是在 ±1 電度。另一方面,AMT 編碼器可達(dá)到更高的精度,通常在 ±0.1 電度以內(nèi)。AMT 編碼器的波形從 U 和 W 都是高電平時(shí)開始(上述波形中的第三個(gè)狀態(tài));請(qǐng)咨詢電機(jī)制造商,了解相應(yīng)的反電動(dòng)勢(shì)圖,以確定在對(duì)齊過程中哪些相應(yīng)該通電。
AMT 換向編碼器的方向設(shè)置
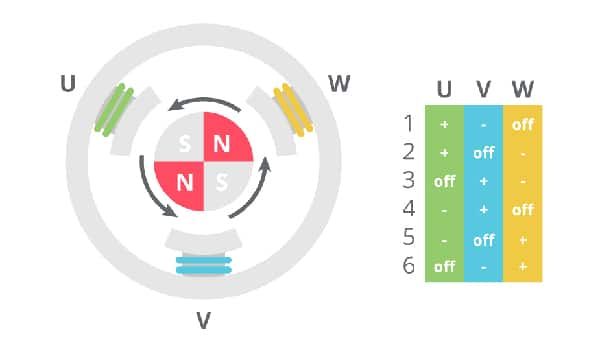
除了可編程極數(shù)和分辨率功能外,AMT 系列還為換向應(yīng)用提供了方向設(shè)置——這是大多數(shù)其他換向編碼器制造商沒有提供的獨(dú)特功能。簡(jiǎn)單地說,通過方向我們能夠知道編碼器的軸應(yīng)該以何種方式旋轉(zhuǎn),以使換向信號(hào)前移。通常情況下,換向編碼器安裝在電機(jī)的后軸上。在這種情況下,當(dāng)電機(jī)逆時(shí)針旋轉(zhuǎn)時(shí)(從電機(jī)后部看),換向信號(hào)在其狀態(tài)中前移。然而,如果編碼器安裝在前軸上,就根本上把編碼器翻轉(zhuǎn)過來了,現(xiàn)在當(dāng)我們逆時(shí)針旋轉(zhuǎn)電機(jī)時(shí)(從電機(jī)后面看),編碼器軸實(shí)際上是順時(shí)針旋轉(zhuǎn)的(從編碼器上自上而下看)。這意味著電機(jī)磁極與編碼器磁極的旋轉(zhuǎn)方向相反,如下圖 3 所示。至于其他不含這種可編程選項(xiàng)的技術(shù),則需要對(duì)編碼器盤或 U、V、W 通道進(jìn)行物理交換,以完成同樣的任務(wù)。對(duì)于利用多個(gè)具有不同方向要求的無刷直流電機(jī)的應(yīng)用來說,這種可編程功能可能特別有用。
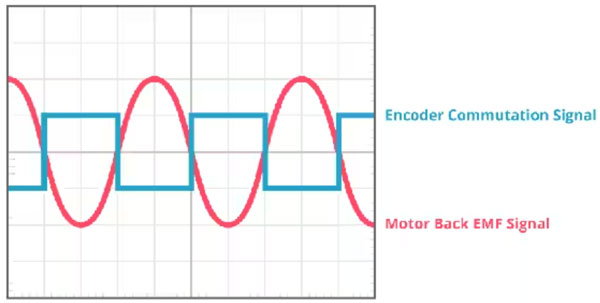
圖 3:換向波形與反電動(dòng)勢(shì)方向相反(圖片來源:CUI Devices)
結(jié)語
BLDC 電機(jī)的使用在持續(xù)增長(zhǎng),如果采用嚴(yán)格的控制回路和高精度位置檢測(cè)反饋,這類電機(jī)可在許多應(yīng)用中表現(xiàn)出色。霍爾效應(yīng)傳感器得益于其低 BOM 成本,多年來一直是首選解決方案,但除了與增量編碼器配對(duì)使用外,霍爾傳感器往往無法提供完整的電機(jī)位置信息。不過,CUI Devices 的 AMT 換向編碼器提供了一種多合一解決方案,完全不需要霍爾效應(yīng)傳感器和增量編碼器。CUI Devices 的 AMT31 或 AMT33 換向編碼器以其靈活的可編程功能、簡(jiǎn)單的安裝方式成為市場(chǎng)上最熱門的選擇。找元器件現(xiàn)貨上唯樣商城如本文所述,對(duì)于即將到來的 BLDC 電機(jī)項(xiàng)目來講,在我們基本上了解換向編碼器原理后,就能讓這類編碼器成為一種引人注目的選擇。
審核編輯:湯梓紅
-
控制器
+關(guān)注
關(guān)注
112文章
16214瀏覽量
177479 -
電機(jī)控制
+關(guān)注
關(guān)注
3530文章
1861瀏覽量
268415 -
通信
+關(guān)注
關(guān)注
18文章
5977瀏覽量
135871 -
BLDC
+關(guān)注
關(guān)注
205文章
795瀏覽量
96749 -
BLDC電機(jī)
+關(guān)注
關(guān)注
7文章
211瀏覽量
21447
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
BLDC電機(jī)換向方法解析
怎樣去設(shè)計(jì)一種基于STM32F407的直流無刷電機(jī)BLDC控制硬件電路?
無刷直流BLDC電機(jī)優(yōu)點(diǎn)
一種伺服電機(jī)的控制方法
無刷直流BLDC電機(jī)簡(jiǎn)介
怎樣去設(shè)計(jì)一種基于STM32的BLDC直流無刷電機(jī)控制器
BLDC電機(jī)換向方法解析

分析 | BLDC電機(jī)換向最有效方法

一種直流無刷電機(jī)的控制方法
BLDC電機(jī)的工作原理和接線方法
bldc電機(jī)什么意思 bldc電機(jī)和fpa直驅(qū)電機(jī)哪個(gè)好
bldc電機(jī)是變頻電機(jī)嗎 bldc的控制方式
bldc六步驅(qū)動(dòng)法原理 BLDC無刷直流電機(jī)和bldc電機(jī)有啥區(qū)別
一種更好的 BLDC 電機(jī)通信方法





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論