 Haptics系統的工作原理和ERM/LRA的特點
Haptics系統的工作原理和ERM/LRA的特點
Haptics系統通過觸覺反饋來實現人機交互,用戶通過點觸屏幕即可完成短信、打字、游戲等各種應用,得益于其簡單方便的交互體驗,Haptics已經成為了智能手機、平板電腦中廣泛應用的人機交互方式。
Introduction
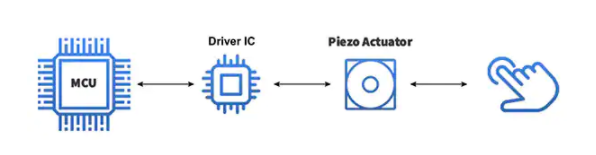
針對不同的應用場景,手機廠家會設計不同的效果波形,當屏幕控制器感應到用戶的某種Touch操作后,觸發Processor生成一個對應的振動指令和驅動波形給Haptics Driver IC,Driver IC對驅動波形進行放大和修正后,驅動Actuator執行對應的振動效果。
Haptics系統主要由以下幾部分組成:
Processor:終端設備的處理器,當Processor接收到觸覺觸發信號時,會生成對應的振動指令和振動效果波形發送給Haptics Driver IC,將振動指令和效果傳達出去。
Haptics Driver Solution:Haptics驅動方案,對Processor產生的振動波形進行放大和修正后,驅動Actuator產生振動。針對不同的Actuator,Haptics Driver Solution有所不同,除了相應的Driver IC,還包括必要的軟件或算法程序,下文將會展開介紹。
Actuator:振動發生器,是Haptics系統中最為關鍵的一環,生成振動效果反饋給用戶,是將電能轉換為機械能的過程。常用的Actuator通常可以分為三大類:偏心轉子馬達(Eccentric Rotating Mass: ERM)、壓電馬達(Piezo)、線性諧振馬達(Linear Resonant Actuator: LRA),根據振動方向的不同,LRA又分為Z軸LRA和X軸LRA。由于Piezo采用特殊壓電材料制成,價格相比ERM和LRA要昂貴許多,在終端設備中很少使用,本文不作討論。
2. EMR
如圖2所示,ERM主要由四個部分組成,圖片最左側的偏心轉子質量塊用于產生振動;右上方的磁鐵、馬達殼、螺釘和主軸承組成ERM的定子組件;中間的無芯繞組、轉向器電機軸組成ERM的電樞組件;下方的端蓋組件用于固定和連接。將ERM固定在終端設備上,即可將偏心轉子旋轉所產生的振動頻率和強度傳遞給終端設備。
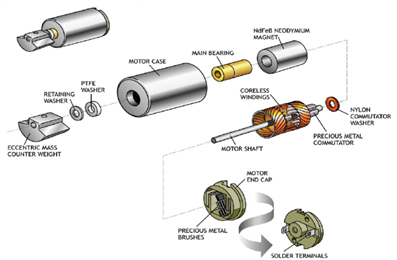
Figure 2, Eccentric Rotating Mass
ERM體積和重量都比較大,利用離心運動產生振動效果,震感比較強烈,并且振動頻率可以從1Hz到300Hz,方案簡單,價格低廉。
然而,ERM的構造決定了它的固有缺點:首先,ERM的驅動波形為DC波形,通常隨著輸入電壓增大,ERM的振動增強,但由于ERM體積和重量都比較大,需要驅動電壓大于一定值時,才能開始振動,因此相比于其他類型的Actuator,ERM的功耗通常較大;第二,ERM利用離心運動產生振動效果,振動響應速度慢,起震和停止的速度都比較慢,觸覺體驗不好。
針對ERM的特點,TI提供了多種Driver Solution,Driver芯片集成了Overdrive過載驅動和Brake剎車功能[2],能夠減小ERM的起震時間和停止時間,改進ERM的觸覺反饋效果,如TI的DRV2603/DRV2604/DRV2605等Haptics Driver IC,具體設計方案可以參考DRV2605的Evaluation Kit。
3. LRA
LRA可以被認為是質量彈簧系統,該系統的質量系統在AC驅動信號的驅動下進行線性運動,產生所需的觸覺反饋振動效果。不同于以DC電壓進行驅動的ERM,LRA需要由AC信號驅動。若LRA在驅動信號作用下沿Z軸振動,即為Z軸LRA;若LRA在驅動信號作用下沿X軸振動,則為X軸LRA。相比ERM,LRA的體積更小,重量更輕,振動響應速度快,起震和停止的時間都很短,觸覺反饋體驗更加清脆。
圖3為LRA系統的頻率響應,組成LRA的質量彈簧系統是一個Q值很高的諧振系統,偏離諧振頻率的頻率響應急劇下降。如圖3所示,LRA共振頻率可能由于制造公差和環境因素等變化而變化。因此,為了達到最大的振動強度,需要確保其驅動頻率始終能跟蹤LRA的諧振頻率點。
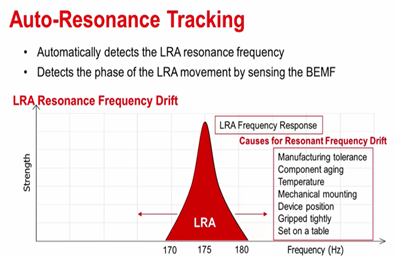
Figure 3, LRA Frequency Response
TI的Haptics Solution使用Auto-F0 Tracking算法檢測LRA的諧振頻率F0,使驅動信號的頻率跟蹤LRA的諧振頻率F0,以實現LRA更好的振動效果。下面以TI針對Z軸LRA的Haptics Solution為例,介紹TI Haptics Solution使用的Auto-F0 Tracking算法如何工作。
3.1 Z軸LRA
如圖4所示,Z軸LRA的主要由5部分組成:移動質量塊、彈簧、音圈、磁鐵以及端蓋組件,通過音圈的電流在移動質量塊上施加機械力使質量塊上下移動,驅動LRA振動[1]。因為圖4所示LRA在驅動信號作用下沿著Z軸方向振動,故稱Z軸LRA。
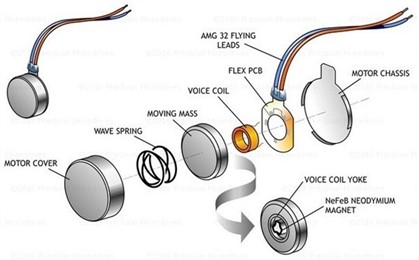
Figure 4, Z-axis LRA
TI的 DRV260X系列Haptics Solution可以直接用于Z軸LRA,集成了LRA驅動所需的Auto-F0 Tracking算法。以圖5所示的DRV2605為例,Auto-F0 Tracking是以Back-EMF檢測模塊為核心構成的閉環控制算法[2]。
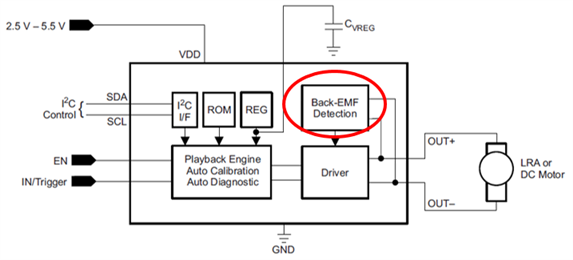
Figure 5 DRV2605 Block Diagram
Auto-F0 Tracking的原理如下:Haptics Driver施加在LRA音圈的電流將在LRA內部質量塊上產生機械力,驅動LRA線性振動,隨著LRA內部質量塊的移動,LRA音圈相對于磁場的移動也將產生反向電動勢(Back-EMF),圖5中DRV2605的Back-EMF模塊將檢測LRA產生的Back-EMF電壓,根據Back-EMF電壓與頻率特性的對應關系可以確定LRA系統的諧振頻率F0。
通過Auto-F0 Tracking得到的F0頻率,一方面可以應用于驅動振動的波形頻率,得到更有效的振動;另一方面,也可以直接應用于與驅動振動的信號反相的剎車信號,使振動停止非常迅速。這種Auto-F0 Vibration & Braking機制最終使Haptics系統得到清脆不拖沓的觸覺反饋效果。針對Z軸LRA的Haptics Solution可以參考DRV2605, http://www.ti.com/lit/ds/symlink/drv2605.pdf。
3.2 X軸LRA
相比ERM,Z軸LRA的振動效果已經有很大提升,但是由于Z軸LRA振動方向沿著Z軸,即上下振動,在厚度比較薄的終端設備中,振動幅度受限,而X軸LRA則解決了這一限制。
如圖6所示,X軸LRA一般為矩形,主要由5部分組成:移動質量塊、音圈、磁鐵、彈簧和端蓋組件。彈簧連接在質量塊的左右兩側,因此LRA振動在X平面,具有更大的振動空間,可以達到更大的振動幅度。
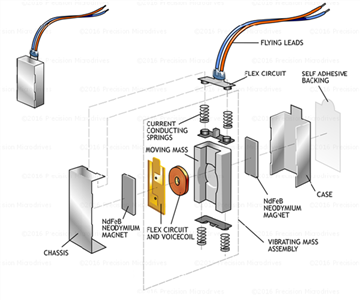
Figure 6, X-axis LRA
和Z軸LRA類似,X軸LRA頻率響應的Q值非常高,因此也需要Auto-F0 Tracking來完成驅動信號頻率對LRA諧振頻率的追蹤。除此之外,由于X軸LRA振動在X軸方向,具有更大的振動幅度,因此需要更高的驅動電壓。
TI提供Smart Amp作為X軸LRA Haptics Driver的Solution。一方面,Smart PA內部集成了BOOST結構,能夠提供X軸LRA需要的高驅動電壓;另一方面,Smart PA集成了IVsense Feature可以檢測LRA的Back-EMF電壓[3],通過圖7所示的算法結構完成LRA諧振頻率F0的追蹤和驅動波形頻率校準。
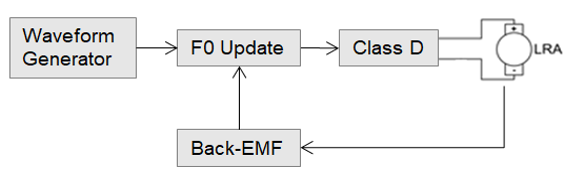
Figure 7, Auto-F0 tracking for X-axis LRA
4.Summary
綜上所述,本文詳細介紹了Haptics系統的工作原理和ERM/LRA的特點,針對不同的Actuator,TI提供全方位的Haptics Solution,包括Haptics Driver IC和相應的Driver Algorithm。隨著智能手機越來越薄,我們可以預見的是X軸LRA會得到越來越多的應用,以幫助用戶獲得更好的觸覺反饋體驗。
審核編輯:郭婷
-
人機交互
+關注
關注
12文章
1200瀏覽量
55322 -
智能手機
+關注
關注
66文章
18431瀏覽量
179863 -
平板電腦
+關注
關注
4文章
2005瀏覽量
77658
發布評論請先 登錄
相關推薦
ERM 和 LRA 觸覺參考設計,具有 Bluetooth? 低能耗遠程
支持觸覺的游戲控制器設計
ERM 和 LRA 觸覺參考設計,具有 Bluetooth? 低能耗遠程
線性諧振傳動器如何工作?
ERM&LRA觸覺驅動程序
基于DRV2605高級觸覺驅動器可簡化消費類和工業類產品的觸覺反饋設計包括原理圖和物料清單
基于ERM和LRA觸覺驅動器的具有Bluetooth低能耗遠程的參考設計
適用于LRA和ERM電機的DRV2605觸覺驅動器參考設計
Haptics系統介紹
帶有針對線性諧振制動器(LRA)自動諧振跟蹤和針對離心旋轉質量制動器(ERM)優化驅動的觸控反饋驅動器

探討新型壓電觸覺執行器相比 ERM 和 LRA 的優勢
ERM和LRA觸覺參考設計 具有Bluetooth reg低能耗遠程

從ERM到X-axis LRA,TI為你提供全面的Haptics Solution
開源硬件-TIDA-00266-ERM 和 LRA 觸覺 PCB layout 設計,具有 Bluetooth® 低能耗遠程





 工商網監
工商網監
評論