 動起來!步進電機控制解惑
動起來!步進電機控制解惑
本文導讀
近幾年新能源汽車快速發展,步進電機大量應用于電子水閥、空調電子出風口、儀表盤、隨動轉向大燈、主動進氣格柵等部件。步進電機是什么?怎么才能讓它轉起來?本文將帶您了解步進電機 ,讓步進電機動起來!
步進電機的介紹
1.簡介步進電機是一種將電脈沖信號轉換成相應角位移或線位移的電動機。每輸入一個脈沖信號,轉子就轉動一個角度或前進一步,其輸出的角位移或線位移與輸入的脈沖數成正比,轉速與脈沖頻率成正比。因此,步進電動機又稱脈沖電動機。步進電動機的結構形式和分類方法較多,一般按勵磁方式分為磁阻式、永磁式和混磁式三種;按相數可分為單相、兩相、三相和多相等形式。 步進電機價格便宜,擁有優秀的啟停和反轉響應,因為沒有電刷,可靠性和壽命都較高,并且控制簡單,由于其沒有過載能力,且不能高速運行,常常被使用在低速、低負載有位置控制要求的場合,在各個領域都被廣泛應用。 步距角是步進電機的一個重要參數,步距角越小步進電機的控制精度越高。例如步距角1.8°,整步驅動控制時,給1個脈沖信號,電機就轉動1.8°,給200個脈沖信號,電機機械角度轉動一圈。

圖1 2.驅動方式步進電機種類很多,下文將介紹兩相四線雙極性步進電機的3種驅動方式。
整步驅動
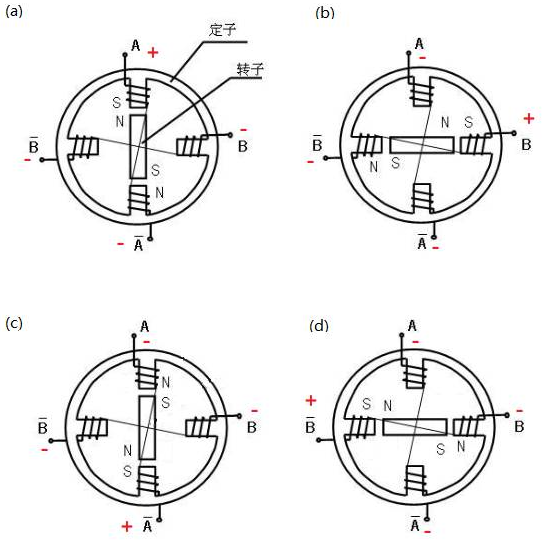
圖2
整步驅動可以單拍導通或雙拍導通。圖2為單拍導通:A –> B -> A- -> B- -> A ,由A導通切換成B導通時((a)到(b)的過程),吸引轉子轉到B,因為步進電機內部有Z個齒數,這個過程實際上是最近的齒轉動到B方向,即一個步距角。
雙拍導通:AB –> BA- -> A-B- -> B-A -> AB ,由于兩相導通,電流更大,可提供更大的轉矩。導通順序反過來即可實現反轉。 整步驅動實現簡單,但控制精度低且振動明顯。
半步驅動
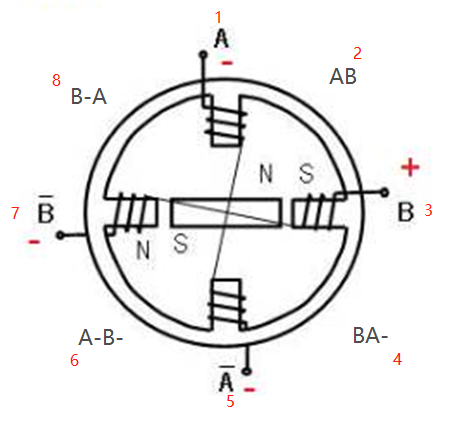
圖3
半步驅動和整步驅動相似,半步驅動為單、雙拍混合導通:A –> AB –> B -> BA- -> A- -> A-B- -> B- -> B-A -> A 。使用半步驅動,步距角縮小一半,控制精度提高、振動降低,但轉矩不平穩。 3.細分驅動
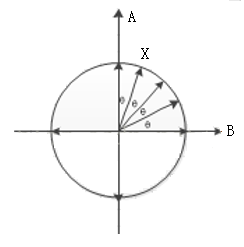
圖4
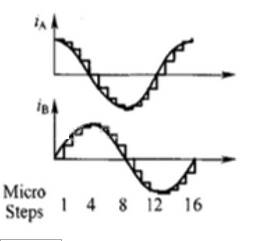
圖5
步進電機的細分驅動實際上是矢量控制。圖4是步進電機的四細分控制,一個步距角細分成4步,以提高控制精度,其原理為:控制A相輸出電流大小為IA=I*cosθ,B相的為 IB=I*sinθ時,合成X方向,大小為I的電流,相當于合成X方向的磁場,讓轉子轉動到X方向的位置。細分角度順時針增大為2θ、3θ等,通過控制A、B相電流大小,合成對應角度的電流,就實現步進電機順時針轉動。因為合成磁場大小和電流大小成正比,當相電流I1=I*k時(0
步進電機的實際應用除了考慮驅動方式,還需要選擇一塊主控芯片,不同的主控芯片的控制方案不相同。一般步進電機的控制方案為:MCU+驅動器+步進電機,由于使用驅動器,需要占用不少的板載空間,而且成本也相對較高。而使用高集成度的電機控制芯片,可以將方案簡化為:MCU+步進電機,這樣的方案無疑可以節省空間和開發成本。NSUC1610是納芯微推出的一款高集成度的電機控制芯片,非常適合應用于車載步進電機控制。
1.芯片特點
ARM Cortex-M3 內核
64KBytes Flash, 4KBytes SRAM, 512 Bytes EEPROM
工作電壓 5.5V~18V ,可承受40V短時間過壓
1個12bit 高精度1MSPS ADC
2個8bit DAC
3個快速反電勢比較器BEMFC
支持3線4線SPI通信
1個LINUART模塊,集成LIN PHY,支LIN2.X通信
3個16bit 輸入捕獲模塊
2個16bit 定時器
1個窗口看門狗和1個數字看門狗
4路半橋輸出 ,4路增強型互補 EPWM 輸出,內部有過流保護,可輸出100%占空比
每路MOUT輸出電流可達1A,1個軟件可控制的高邊驅動
1個5V輸出的LDO和1個1.8V輸出的LDO
1個溫度傳感器 ,內部集成過溫關斷功能,可以保護橋臂,防止出現過溫
支持環境溫度-40~150,結溫-40~175,全溫范圍內靜態功耗小于50uA
QFN32封裝,僅5x5mm,符合AEC - Q100
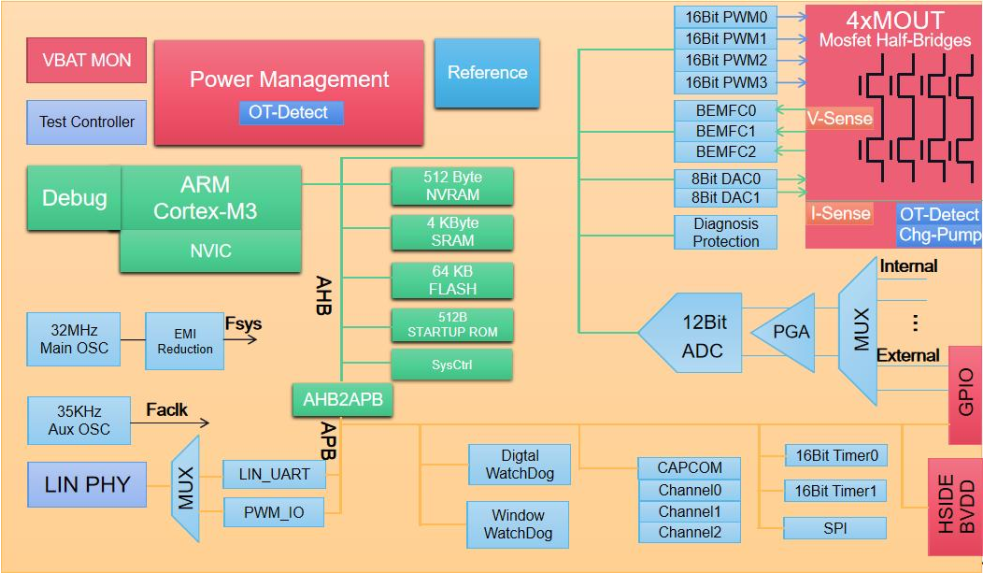
圖6NSUC1610框圖
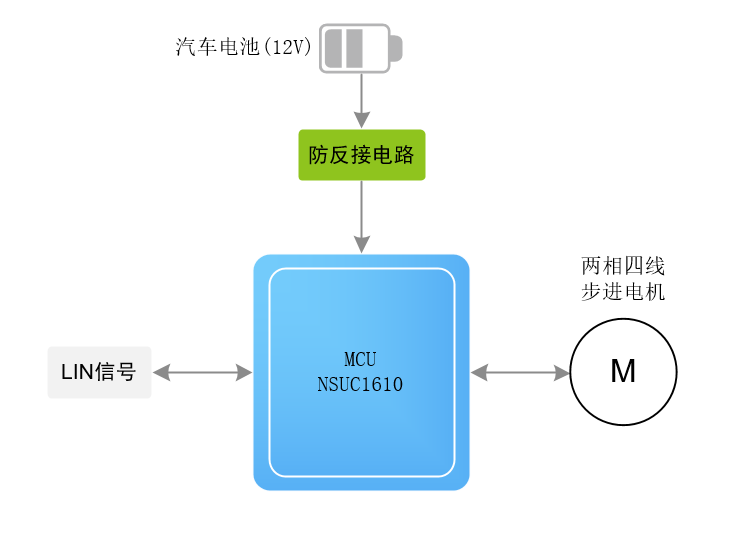
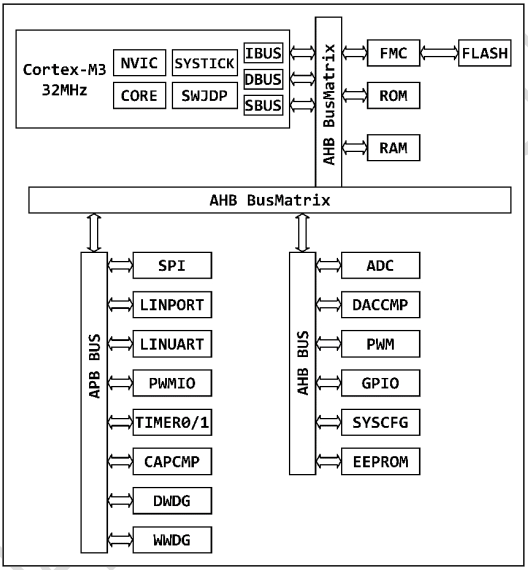
NSUC1610內部集成驅動和4路半橋,可支持驅動直流有刷電機、直流無刷電機、步進電機和繼電器等。此芯片可以用來設計車用小尺寸、小功率、高效率電機智能執行器應用,例如熱管理系統中的電子水閥、空調電子出風口、主動進氣柵格系統執行器(AGS/AGM)、座椅通風無刷直流電機(BLDC)驅動、隨燈轉向大燈(AFS)、旋轉/升降大屏控制、自動充電口和自動門把手等。 2.步進電機控制方案 如圖7所示,NSUC1610芯片的硬件控制方案非常簡單,幾乎不需要搭建外部電路,LIN是直連芯片的LIN的輸入引腳,不用收發器、電機驅動方式也是直連芯片。如圖8為NSUC1610芯片的總線架構,芯片內核使用獨立的數據總線和地址總線,能夠提高取指令和取數據的效率。 步進電機的控制使用到的關鍵模塊為: DACCMP(BEMFC模塊)、ADC、LINPORT、LINUART、TIMER0、TIMER1和EPWM模塊。 其中LINPORT和LINUART用于LIN通信;EPWM用于4路MOUT的PWM輸出;DACCMP用于電流控制,兩個8bit的DAC用于控制A、B相的電流大小,合成相應的電流矢量以實現細分驅動;TIMER0和TIMER1可分別用于細分步的定時(控制每個細分步的執行時間)和各種任務的定時調度;ADC可用于芯片溫度監測和其他模擬信號的采集。
圖7步進電機控制方案框圖
圖8NSUC1610總線架構
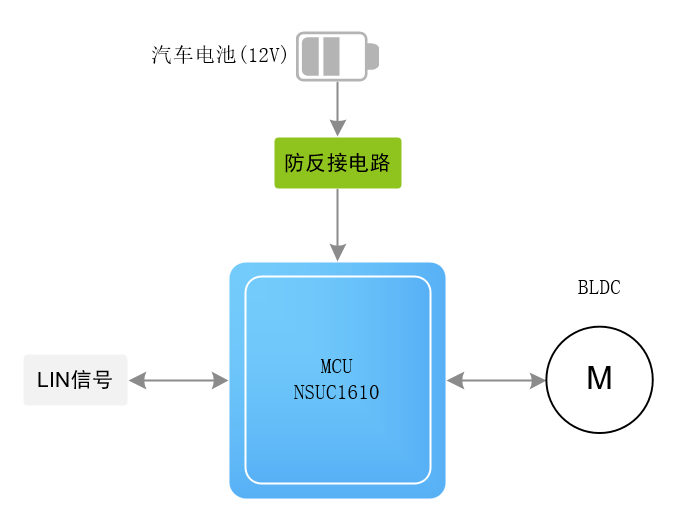
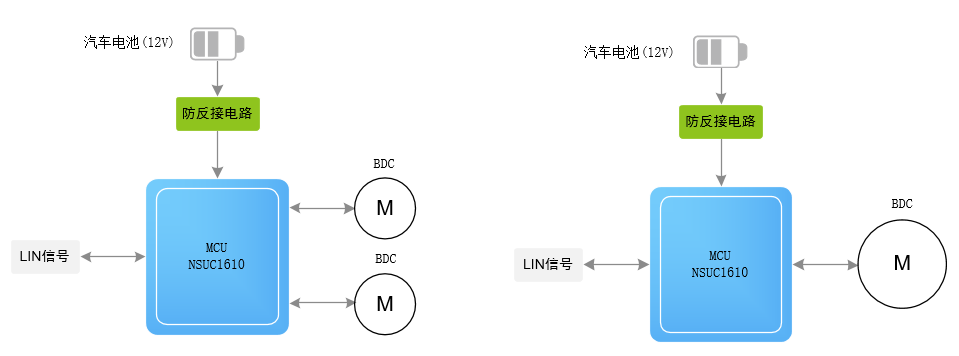
3.芯片優勢 1. 封裝小巧,內部集成4路半橋,無需外部搭建半橋電路、LIN收發器等,僅需電源防反接等少量外圍電路設計,減少PCB設計成本、難度、空間。 2. 支持兩相四線小功率步進電機細分控制,可支持32細分。 3. 支持小功率BLDC的無感控制和帶HALL的有感控制(圖9)。 4. 支持兩個小功率BDC電機的控制,或一個較大功率的BDC電機控制(圖10)。 5. 可配置的DAC,用于過流保護和步進電機的微步控制。具有過流保護,橋臂過流自動關斷的功能。 6. 每路MOUT輸出電流可達1A,內部半橋高邊采用電荷泵驅動,支持100%占空比導通。 7. PWMIO可復用到LIN引腳,便于客戶使用12V高壓PWMIO直接來做電機控制。 8. 雙路溫度傳感器:一個位于功率側做過溫熱關斷,一個位于低壓側做芯片溫度檢測。 9. Cortex M3處理器,編譯環境采用Keil標準編譯和開發工具,編程器資源通用,開發調試簡單。 10. 晶圓結溫高達175°C,滿足車規Grade 0應用目標。
圖9BLDC控制方案
圖10兩種BDC控制方案
步進電機驅動的方式多種多樣,需要結合應用場景的控制精度選擇不同的控制方式與主控芯片。NSUC1610支持12V汽車電池供電,可滿足大部分使用場景,有助于客戶減小PCB尺寸,簡化生產設計,實現更高效、更緊湊以及高性價比的電機控制應用設計。立功科技可提供芯片外設模塊例程、步進電機細分驅動的例程和相關軟硬件設計參考,降低開發難度和成本,協助廠商實現快速開發。
審核編輯 :李倩
-
步進電機
+關注
關注
150文章
3095瀏覽量
147346 -
轉速
+關注
關注
3文章
122瀏覽量
21987 -
脈沖信號
+關注
關注
6文章
394瀏覽量
36916
發布評論請先 登錄
相關推薦
請問怎么使無刷電機動起來,就單單動起來
用過的幾款步進電機驅動IC 精選資料下載
怎樣通過普通IO的驅動6步換相方式成功讓BLDC電機轉動起來
讓步進電機動起來——L298N驅動步進電機

你知道操作系統是如何啟動起來的嗎
BeagleBone AI-64、Servo Cape和讓電機動起來
步進電機如何讓動起來?步進電機轉動原理
e絡盟互動社區發起“動起來”設計大賽






 工商網監
工商網監
評論