 LabVIEW轉子動平衡測控系統解決方案
LabVIEW轉子動平衡測控系統解決方案
1項目背景
本軟件是基于 LabVIEW 的轉子動平衡測控系統,為了實現轉子信號的實時精確采集,使用高采樣頻率,提高采樣的轉換速率,通過多通道實時采集的 NI 采集卡實現信號采集。
為了分析信號的各個頻率的特點,將采集到的信號進行實時處理,得到信號時頻域的特點。
為了了解轉子實驗臺的模態參數,分析出實驗臺的各階臨界轉速,提高動平衡的效果,利用模態分析模塊,對激勵和響應信號處理得到頻響函數,系統可直接識別出模態參數。利用本系統可以進行離線模態的分析也可以進行在線的模態分析。
為了能消除主軸加工過程中由環境及工況變化等因素導致的不平衡,有效提高平衡精度和效率,可進行動平衡控制。控制系統實時對轉子信號進行分析,實現不平衡量的識別和校正。
2項目功能
本測控軟件可以實現以下功能:
實時采集旋轉主軸的振動信號;
數據動態實時顯示;
振動信號時頻域處理;
旋轉主軸軸心軌跡的繪制;
振動信號濾波處理;
模態分析;
進行動平衡控制;
轉速的實時測量;
工頻特征值的提取;
數據保存。
3項目框架
3.1、系統原理
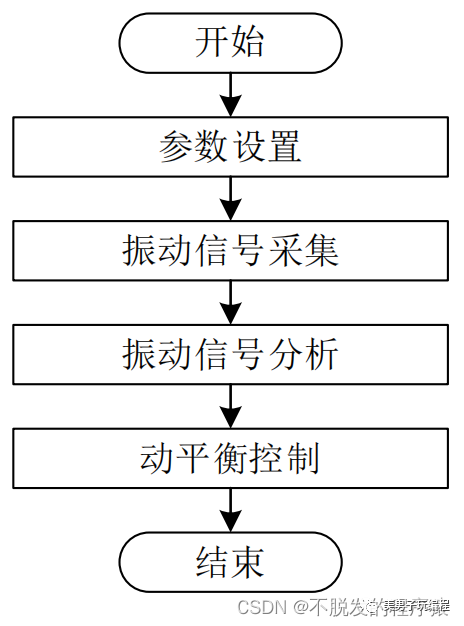
轉子動平衡測控軟件的基本原理是:測試系統實時監測轉子的振動,系統對徑向或者橫向振動信號進行處理,停機進行轉子不平衡量的校正。同時設計了模態分析可以輔助我們對平臺進行臨界轉速下的動平衡。
轉子動平衡測控系統原理圖如下所示:
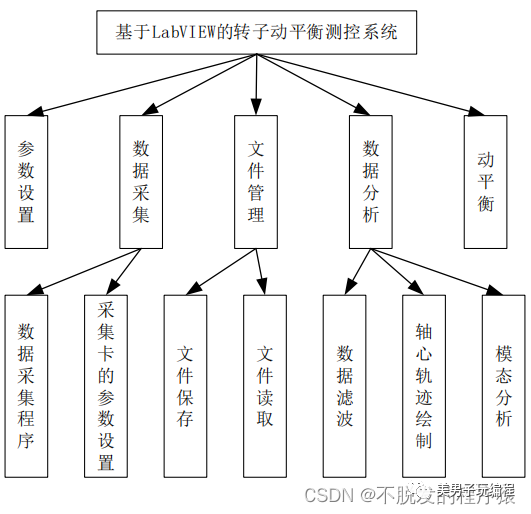
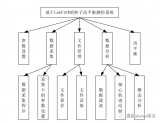
3.2、系統框架
本文所設計的 LabVIEW 軟件系統主要包括五個模塊:參數設置模塊,數據采集模塊,數據保存模塊,數據分析模塊及基于影響系數法單面試重進行轉子動平衡模塊。其中包括許多子模塊包括頻域分析模塊,工頻特征值提取模塊,濾波模塊,模態分析模塊,轉速測量模塊等等,其整體結構圖如下圖所示:
4開發工具
為了保證各硬件之間的協調工作,并使系統具有更高的可靠性,根據硬件支持的操作系統說明,選LabVIEW作為硬件系統運行支持。
為了使軟件運行具有最高的效率,選用 LabVIEW 與 Matlab 混合編程。LabVIEW 是一款圖形化的編程語言開發環境,具有大量的模塊函數、開放式的編程平臺、支持 TCP/IP,DDE 等協議,以及對多種硬件的設備驅動功能等特點;Matlab 有可靠的數值計算和符號計算功能、強大的繪圖功能、簡單易學的語言體系以及為數眾多的應用工具箱。把 LabVIEW 軟件平臺與 MATLAB 相結合使用,無疑將使虛擬儀器的數據處理功能更加強大,大大縮短了開發周期。
5功能實現
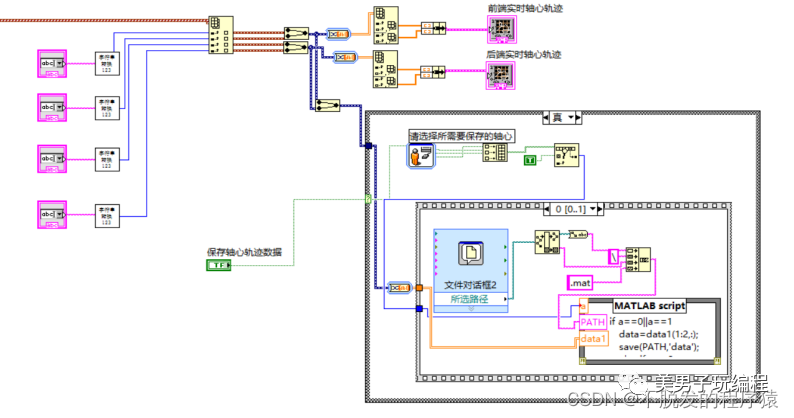
5.1、數據保存
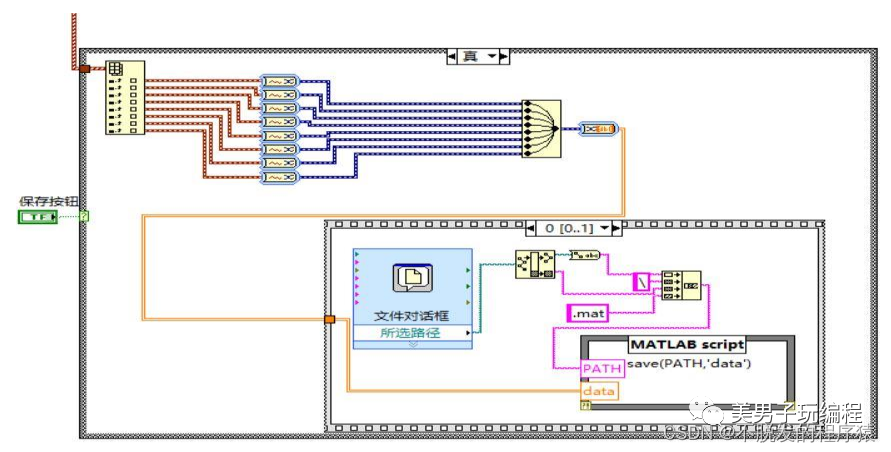
用戶點擊界面的保存按鈕,提示用戶選擇保存文件的文件夾用戶即保存相應的信號數據。實現方法是通過 LabVIEW 調用 MATLAB script 腳本函數將數據保存成 mat 文件。即實現數據的保存功能。
下圖是保存八個通道的采集數據的數據保存程序框圖。
5.2、轉速測量
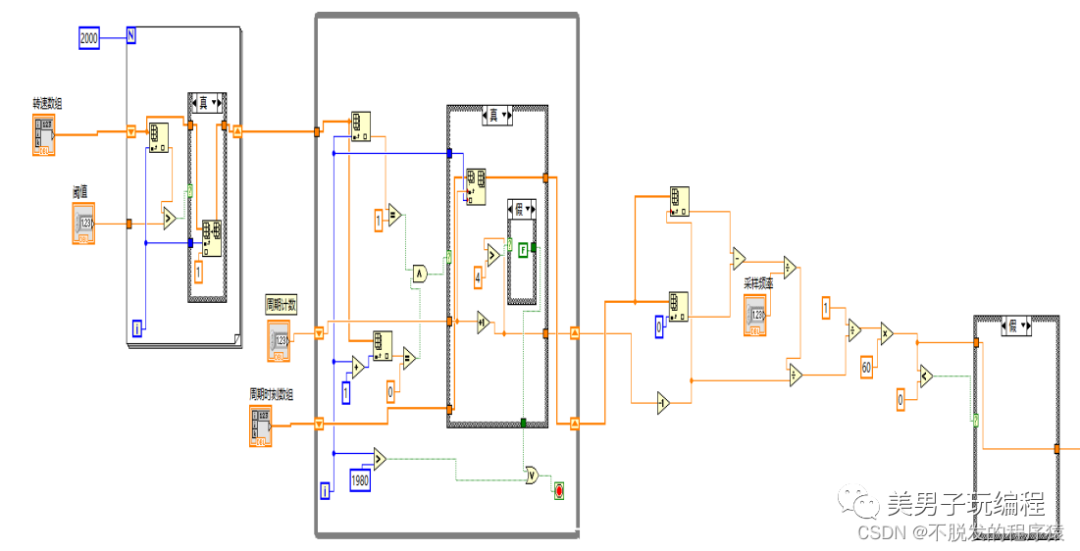
轉速的測量及振動信號的參考相位主要是通過光電傳感器來獲得的。在轉子上貼上一小塊反光材料或者黑色的膠布。當光電傳感器的光打到轉子的反光材料時,光電傳感器接受到的光的強度就會發生變化,直接的反映就是采集到的光電傳感器的電壓信號會隨著轉子的旋轉產生周期信的方波信號(包含許多遞減的諧波信號)。
通過采集到的方波信號,再通過閾值處理生成二值化方波,其次要先記錄轉速下降沿的時刻信息,并將其放在周期時刻數組,在周期到達 5 或者點數超過1980則結束該循環;最后在求得周期時刻信息后,根據轉速周期的數據以及對應的時刻值求得每個周期的時間,然后求對應轉速。
5.3、實時軸心軌跡繪制
將進行過減均值處理的兩路信號,分別作為繪制軸心的 X、Y 向位移數據輸入到 XY 圖控件中去就可以繪制軸心軌跡了。
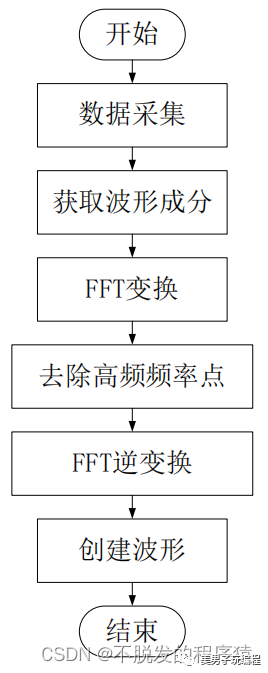
5.4、數據濾波
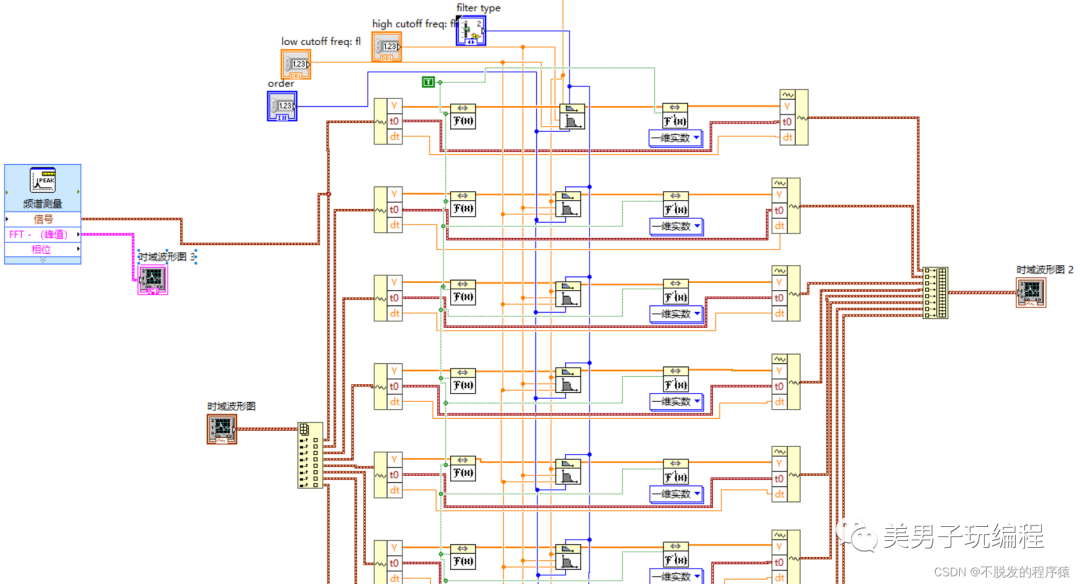
將相應的波形數據首先進行 FFT 變換,在頻譜中去掉相應的頻率成分,然后再進行 FFT 逆變換獲得濾波后的波形圖。具體原理如下圖所示:
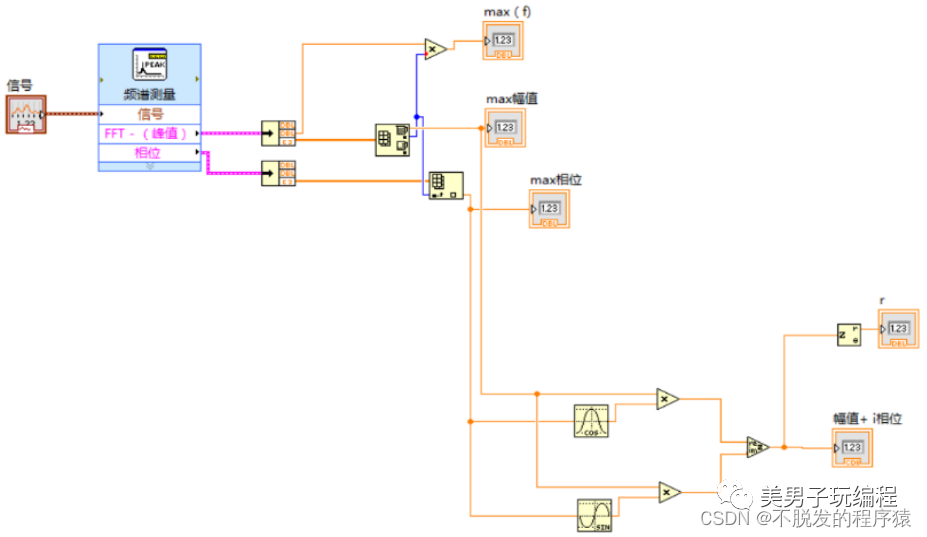
5.5、工頻特征值提取
通過相關算法提取工頻特征值,建立與基頻頻率相同的正余弦信號,通過相關算法可以過濾掉除基頻之外的其他頻率成分,從而實現信號的工頻幅值和相位的提取。由于 matlab 實現算法的便捷性,采用 LabVIEW 調用 matlab 的形式完成算法的實現。
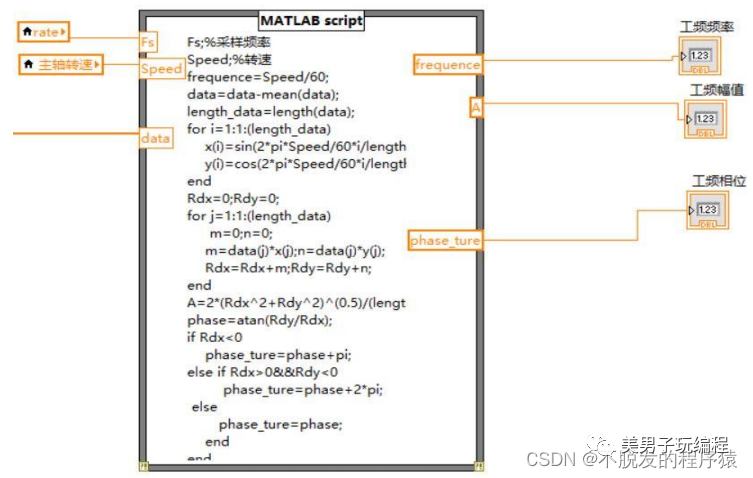
利用 FFT 變換對信號進行頻譜分析,提取幅值譜的峰值對應的頻率,該頻率基本上就可以認定為工頻頻率,該峰值基本上就是工頻幅值。接著從相位譜中找出工頻頻率對應的相位就是工頻相位。
5.6、模態參數識別
有時候在測量數據的時候有一定的干擾,利用三次采集到的數據進行平均可以使得得到的頻響函數更加準確。
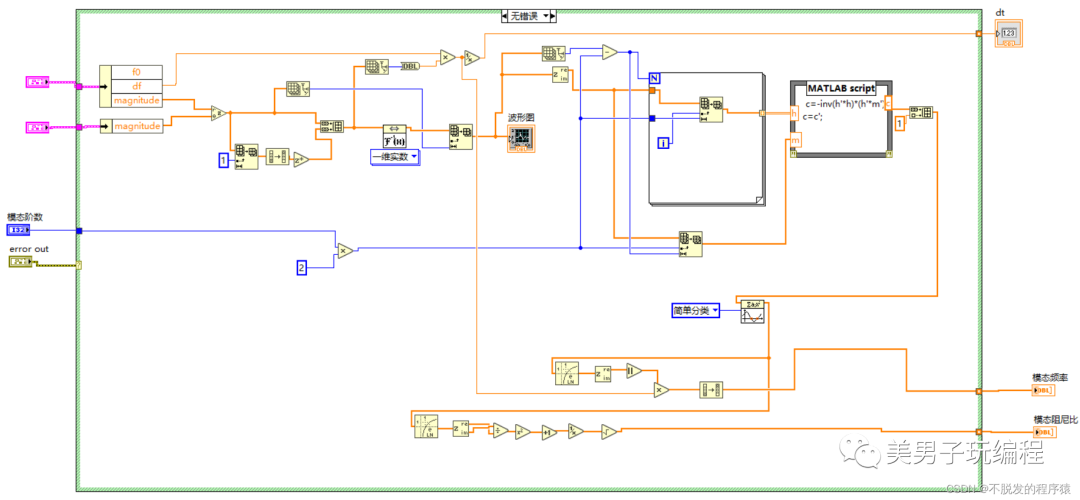
首先將測得的頻響函數在一定的頻段內進行傅里葉逆變換,接著利用 LSCE法進行模態識別。
LSCE 方法的基本思想是通過 Z 變換因子來表示脈沖響應,然后再構造 prony多項式并確定 prony 多項式的自回歸系數,再由 prony多項式求取包含系統極點信息的復指數項,進而求得系統極點和留數,從而得到完整的模態參數。
5.7、動平衡控制
在實際測量過程中,需要將測得的信號記錄并保存在程序中,以便與之后計算配重方案的時候方便調用。利用條件框將不同的數據存儲到對應的輸出數據框中。
最后計算配重的時候要將其進行換算,將得到的配重的幅值和相位對應實際的配種盤進行轉換。相同默認所使用的配重盤只有 16 個孔,每個配重孔之間間隔 22.5°角,同時所使用的配重螺釘重量也有限制。
6項目效果
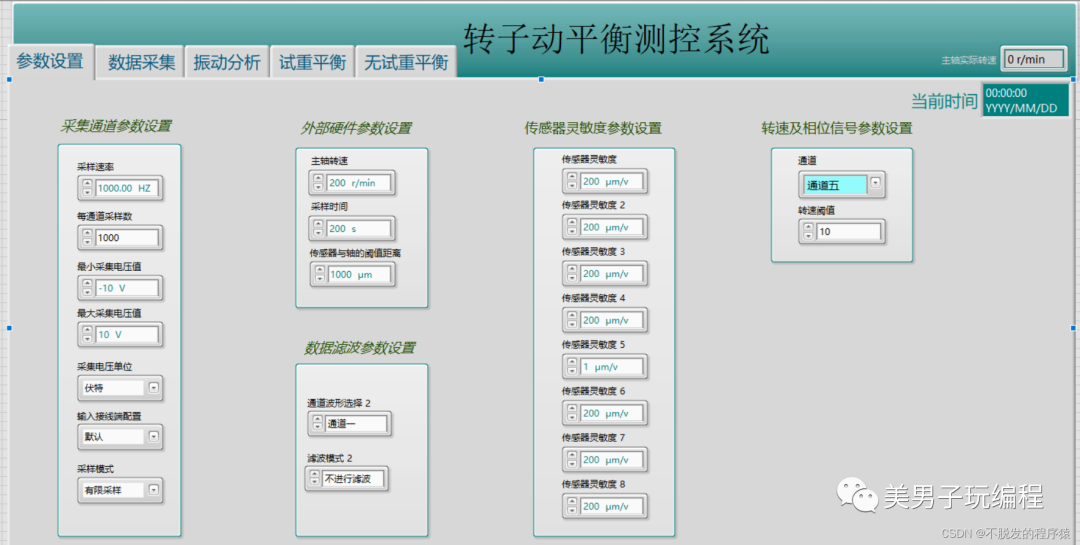
6.1、參數設置界面
參數設置主要分為采集通道參數設置、振動分析參數設置、動平衡參數設置等方面,但具體到軟件系統有采樣速率、采樣點數、采樣方式、主軸轉速、傳感器與軸的閾值距離、傳感器靈敏度、通道設置、轉速閾值、濾波方式選擇等等參數的設置。
本測控系統,設置了一些默認的參數,用戶需要根據具體的情況進行修改。實際測量中NI 采集卡的八個通道所連接的傳感器的靈敏度不一定相同,依照實際情況特別將傳感器靈敏度對應八個通道進行分別的設置。主軸轉速的設置也還是依照實際讀取到的主軸轉速。數據濾波參數設置中,為了顯示效果我們只是一次性顯示某一個通道的信號,因此需要提前設置。
6.2、數據采集界面
數據采集界面主要是實時進行八個通道的數據的采集,具體的物理通道是根據所選擇的 NI 采集卡自動識別的。界面主要可以劃分為:時頻域波形的顯示、波形顯示指示燈、采集信號物理通道、傳感器與軸的閾值距離、工頻特征值顯示、電壓與幅值轉換、采集參數二次設置等幾個區域。
軟件系統可以將采集到的振動信號以時域和頻域的方式實時顯示出來,采集通道前的指示燈主要表明對應通道的信號是否顯示,實際上所有通道的信號都已采集到。采集通道后的顏色方塊可以實時調節該通道顯示的波形曲線的顏色。右側的工頻特征值的提取區域可以實時顯示對應通道的工頻頻率、工頻幅值、工頻相位。

右上側顯示了一些數據采集的參數,如采樣頻率、采樣點數等。但是如果用戶想實時修改可以點擊設置按鈕,就可以對相應參數進行實時設置。
右下側提供開始、保存、停止按鈕,點擊開始按鈕,采集系統就開始工作,點擊保存系統彈出保存路徑對話框,設置好路徑后就會自動將八個通道的數據保存成 mat 格式的數據文件供 matlab 軟件調用分析。點擊停止按鈕系統就停止工作。需要注意的是,當某通道前的指示等滅的時候,該組數據是自動清零的。如果想保存,就必須提前將指示燈點亮。
6.3、振動分析界面
數據濾波界面
數據濾波界面主要可以劃分為:濾波前后時頻域信號顯示、數據濾波模式選擇,相應模式下參數設置、工頻特征值提取。
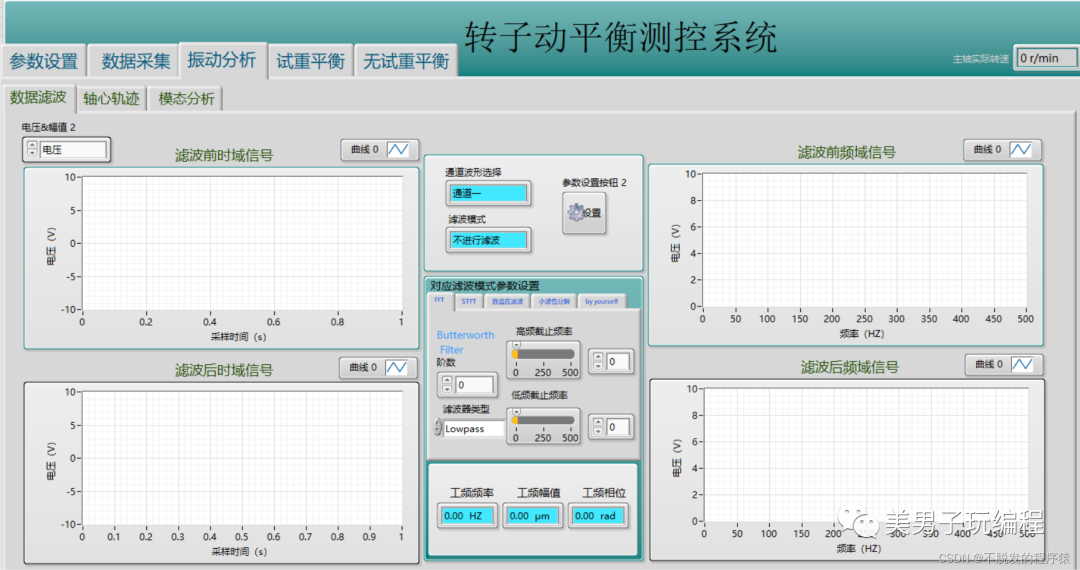
點擊設置按鈕會彈出一個對話框,可以進行通道選擇和濾波模式的選擇。
選擇好某個通道和濾波方式后,點擊中間部分的相應濾波方式的選項卡,進行相應濾波模式的參數設置。就可以在界面兩邊實時顯示出濾波前后時頻域信號波形。
在界面中下部分顯示工頻特征值的模塊,使用的是相關算法實現的工頻特征值的提取。
軸心軌跡繪制界面
系統在運行時就會實時將采集到的旋轉軸截面 X、Y 方向的信號繪制成軸心,通過調節采樣點數和采樣頻率可以較精確的得到實時的軸心軌跡。本系統可以同時繪制兩個界面的軸心軌跡。
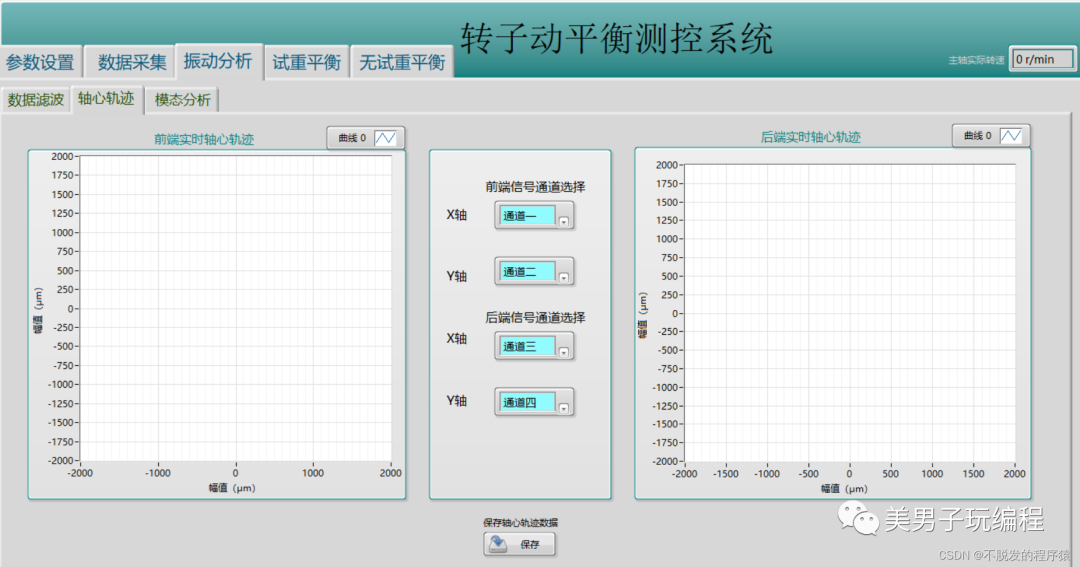
點擊保存按鈕后 ,系統提示保存路徑選擇,選擇好路徑后就可以將數據保存成 mat 格式的數據文件。
模態分析
模態分析主界面包括數據采集參數的設置,如:采集單位、采集通道、采樣模式、采樣速率、樣本大小、采集次數等;濾波參數的設置;閾值設置;預觸發長度設置;FRF 參數設置等。

數據的顯示顯示激振、響應、頻響函數信號,同時還有模態參數的識別顯示如:模態頻率、模態振型、模態阻尼比等。
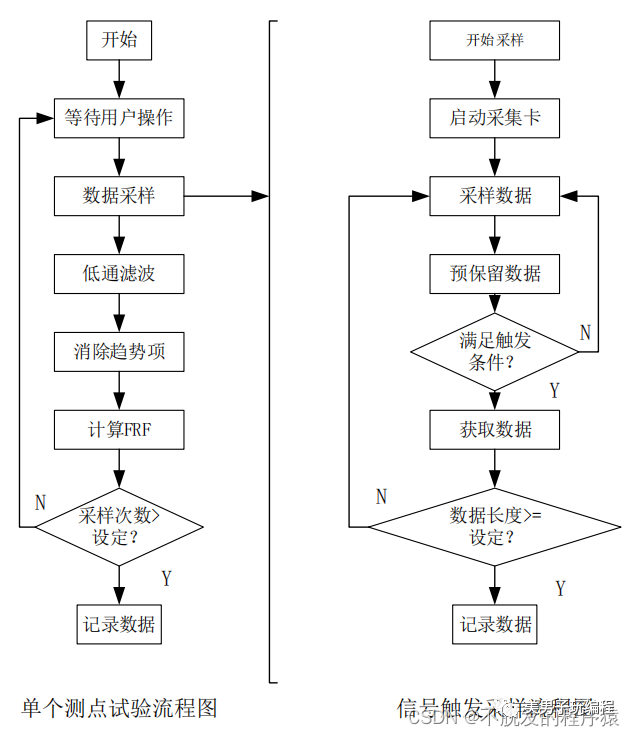
首先測量原始的激勵與響應信號,設置一個激勵閾值,如果監測到激勵信號高于閾值就,將原始信號進行讀取到測量頻響函數的子 VI 中,連續測量三次數據,然后進行平均 FRF 計算獲得結構的頻響函數矩陣,最后通過模態識別的算法,提取模態參數(模態矩陣、模態振型、模態阻尼比等)。在數據進入到測量頻響函數的子 VI 前最好對信號進行。
試驗模態分析中,為了減小為誤差需要對單點進行多次試驗,將多次所得的數據進行平均計算測點頻響函數(FRF)值,其流程如下圖所示:
6.4、動平衡控制界面
界面主要劃分為:時頻域信號顯示,動平衡通道選擇,信號重組和刷新,原始、配重、試重信號采集選擇,配重方案顯示等幾個部分。
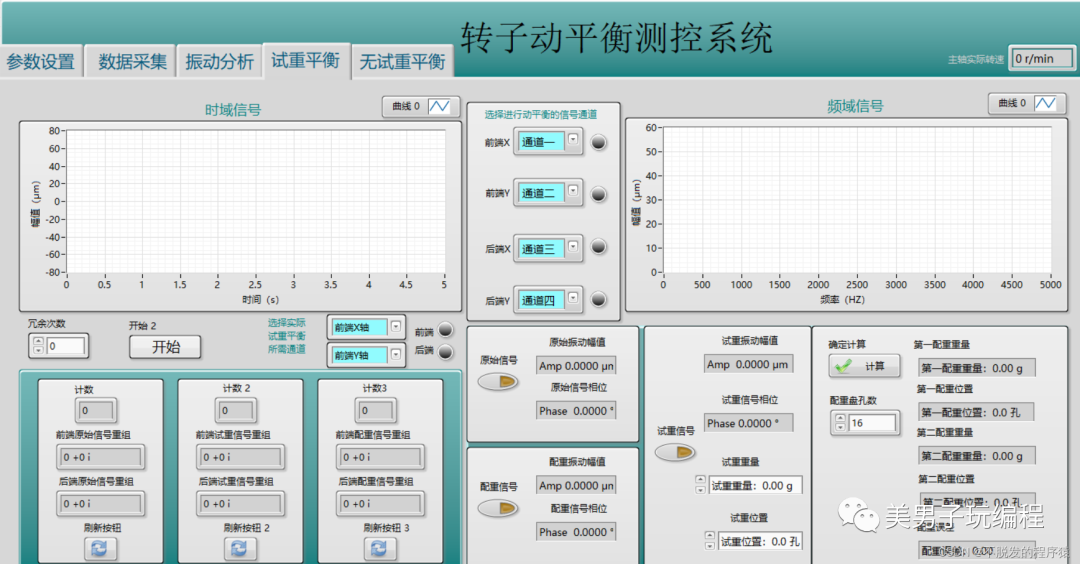
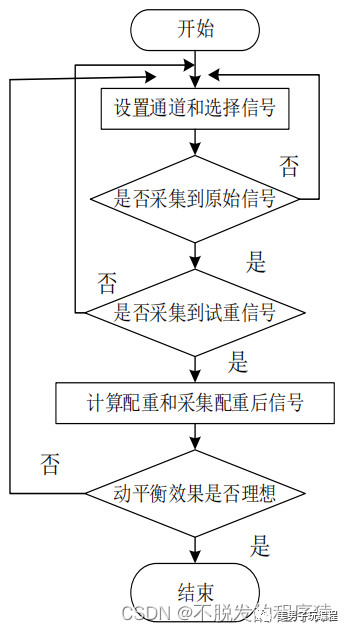
在進行單面試重法進行轉子動平衡的實驗主要是基于前面所說的利用影響系數法進行動平衡。點擊開始按鈕,選擇信號的采集通道。冗余次數是指采集信號的平均次數,這樣對得到的幅值和相位信號更加準確。首先采集原始信號,得到重組信號的幅值和相位,停機添加試重,測量得到的試重信號,將所添加的試重數據(試重重量和試重孔數)和總的配重孔數放到軟件中去,點擊界面右下區域的計算按鈕就可以得到配重方案及配重誤差。接著停機,將所計算到的配重方案添加到實驗臺中,測量配重信號,驗證振動是否降低。
具體流程如下圖所示:
審核編輯:湯梓紅
-
matlab
+關注
關注
182文章
2963瀏覽量
230195 -
LabVIEW
+關注
關注
1964文章
3652瀏覽量
322543 -
硬件
+關注
關注
11文章
3260瀏覽量
66131 -
信號
+關注
關注
11文章
2781瀏覽量
76648 -
測控系統
+關注
關注
2文章
190瀏覽量
23645
原文標題:LabVIEW轉子動平衡測控系統
文章出處:【微信號:美男子玩編程,微信公眾號:美男子玩編程】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
電動平衡車原理淺析
轉子動平衡的5個技術要點詳細解析
基于LABVIEW的動平衡測試系統設計
運用labview和matlab混合編程實現轉子動平衡的測試與控制
什么是動平衡?

電動平衡車膠粘應用解決方案、電子電器膠粘劑解決方案!

轉子平衡的選擇與確定 轉子動平衡技術的方法

轉子動平衡的技術要點有哪些






 工商網監
工商網監
評論