 介紹一種高效的線云重建算法ELSR
介紹一種高效的線云重建算法ELSR
主要內容:
提出了一種高效的線云重建方法,稱為ELSR,其利用了城市場景中常見的場景平面和稀疏的3D點,對于兩視圖,ELSR可以找到局部場景平面來引導線匹配,并利用稀疏的3D點來加速和約束匹配。
為了重建具有多個視圖的3D線段,ELSR利用了一種抽象方法,其基于有代表性的3D線的空間一致性來選擇它們。 實驗表明,其方法可以有效地重建包含數千張大尺寸圖像的大型復雜場景的3D線條。
總的來說,本文是一篇利用場景中的結構化線條來構建線云的算法。 其方法構建的線云如下圖所示: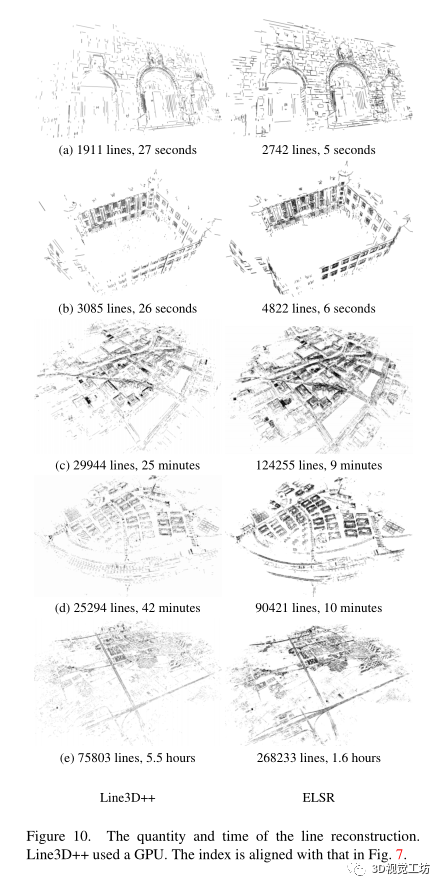
Contributions:
1、提出了一種從多個圖像中匹配線條和重建3D線條的有效方法,該方法易于使用,只需要SfM的結果作為先驗
2、利用二維線和稀疏三維點之間的幾何關系來找到局部單應性。這也是第一個利用這種簡單而有效的幾何形狀進行線段匹配的工作。
3、在大型圖像數據集上進行評估時,ELSR在兩視圖匹配方面比現有算法快1000多倍;在多視圖重建中,ELSR比現有方法快4倍,3D線的數量增加了360%
Pipeline:
給定圖像序列,首先用SfM算法獲取相機姿態和稀疏的3D點;然后匹配兩視圖的線;最后從圖像序列中的所有匹配中提取代表性的3D線。 其包含三個組成部分:
1、單應估計:使用具有兩條鄰域線的場景平面幾何來驗證單應,在此期間,粗糙點深度用于加速
2、引導匹配:將單條線與潛在的單應性進行匹配,并使用粗略的點深度來約束匹配。
3、線抽象:對于多個視圖,首先找到圖像對之間的線匹配的連接,并對空間一致性進行評分;然后選擇具有代表性的匹配作為最終的3D線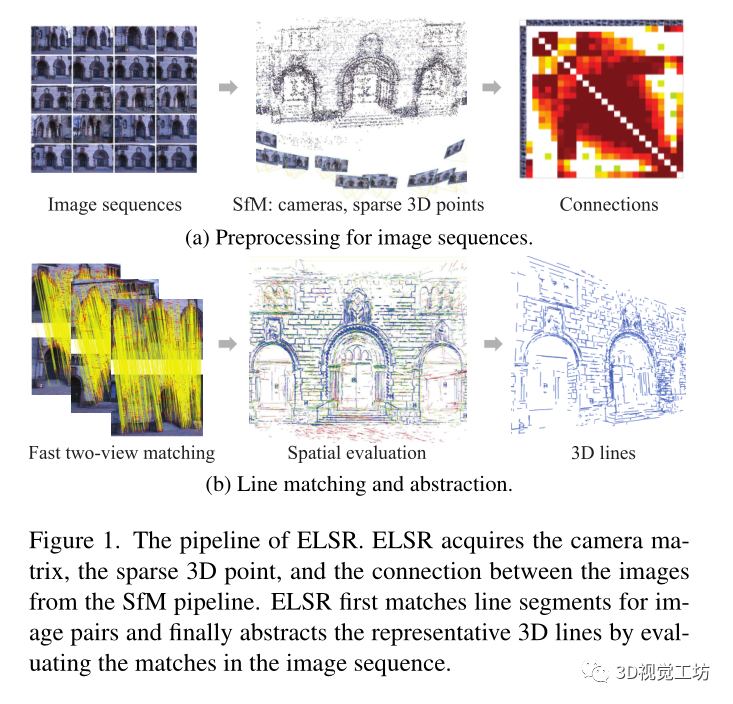
兩視圖線匹配: 主要利用場景平面和點去引導兩視圖下的線段匹配。
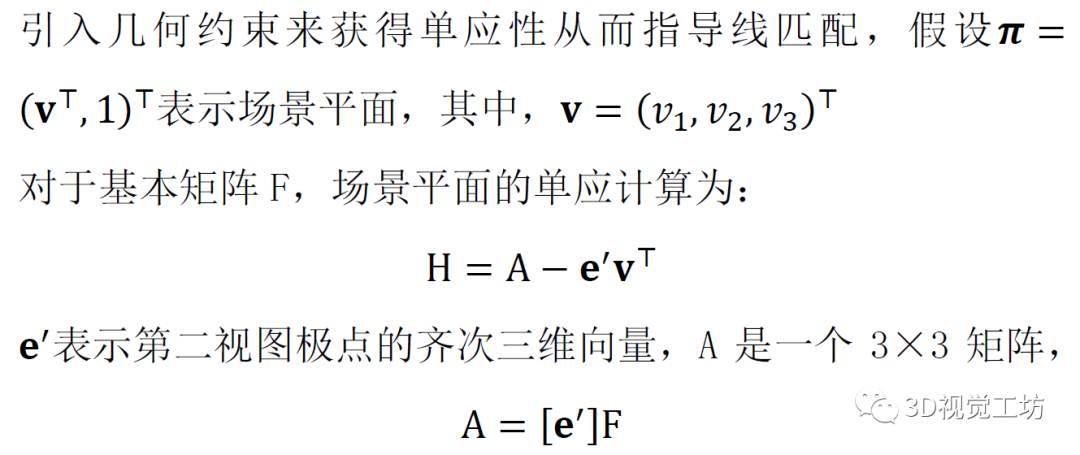
成對線的單應性:
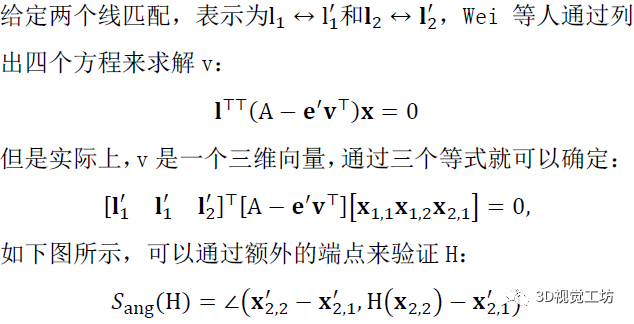
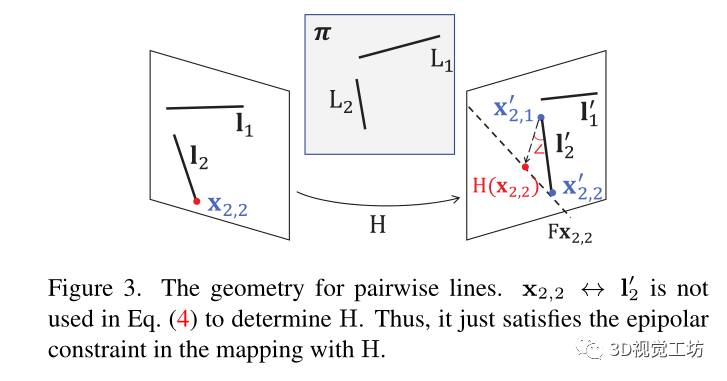
當Sang(H)小于給定的閾值時場景平面是正確的,并且H是有效的。
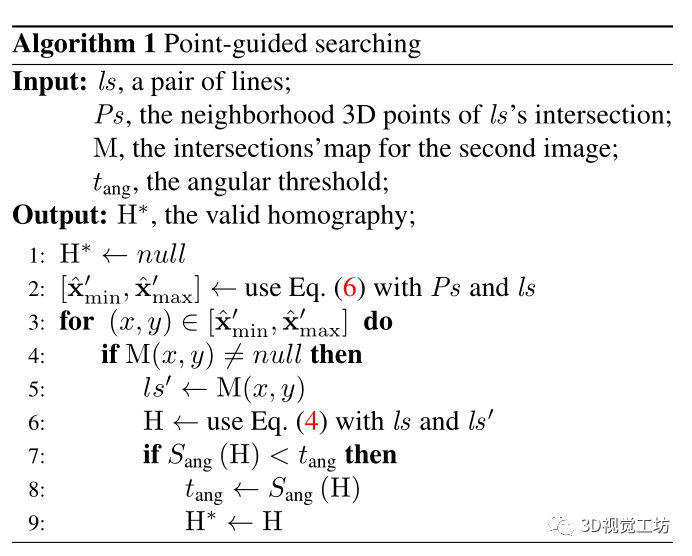
點引導的搜索單應:
算法1是通過點引導尋找單應的方法。 搜索單應以找到滿足給定閾值的的成對線匹配,如下圖所示,共面的成對線在一個確定點上相交。因此沿著對極線搜索第二視圖中的交叉點。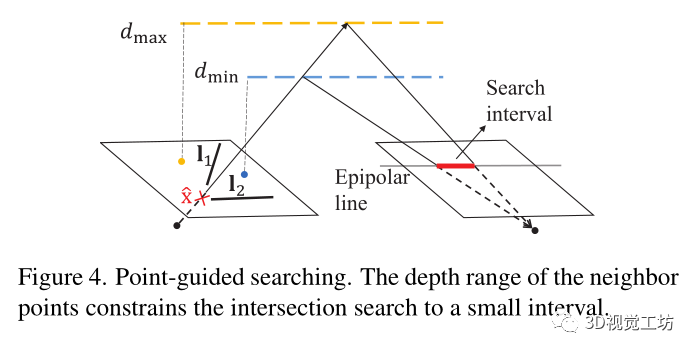
將第一個相機矩陣表示為P,這是一個3×4的矩陣,設M和c4分別為左邊的3×3的子矩陣和P的最后一列,如果x的深度可得,則可以直接計算x在目標空間的位置:

單應引導的匹配:
算法2說明了單應引導的匹配策略,即尋找線li的第k個鄰域的單應Hk,這可以通過建立KDtree來得到,用Hk表示線li的映射為:

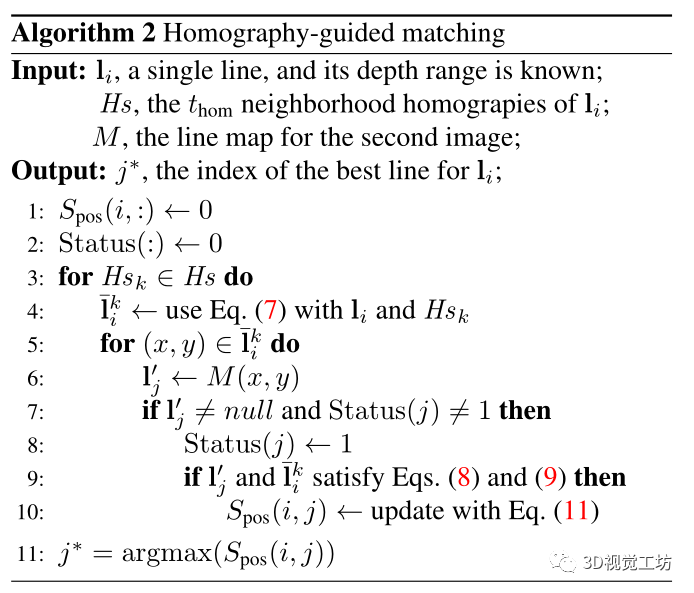
如圖5所示:
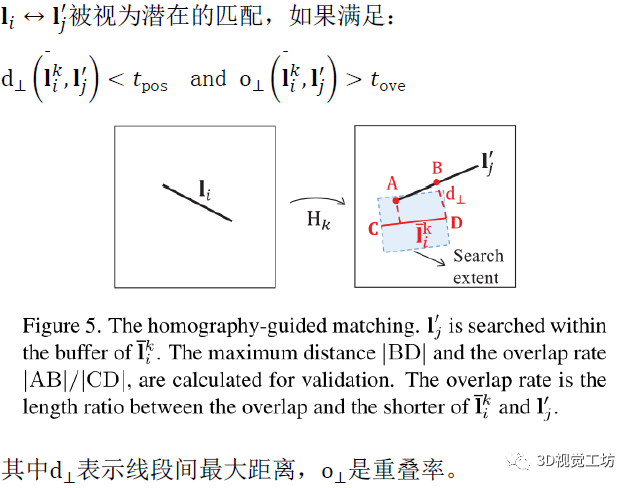
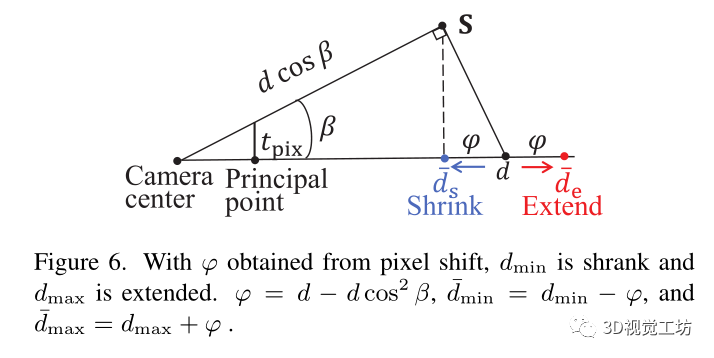
之后可以使用深度約束來控制錯誤的匹配,設l的端點為x,讓3D點鄰域的深度范圍為dmin和dmax,深度范圍可以用來約束x,但是其需要擴展,因為x可能超出深度范圍,特別是當局部場景不連續時,但是,不知道目標空間的單位,這可以通過利用像素和物體距離之間的聯系來確定擴展,如下圖所示,將主點水平移動tpix個像素以獲得β,然后計算與像素偏移對應的深度偏移,最后將dmin和dmax分別縮小并擴展以獲得深度范圍:

由此,線端點的深度為:

同一條線可能有多個單應,其中一些是不正確的,因此利用鄰域的單應去引導線,通過位置相似性為匹配打分:

從多個視圖中提取線:
兩個視圖中的每個匹配都將重建一個3D線段;因此需要將與同一條線相關的3D線段合并為簇。然而這很容易失敗,原因有三:
1)固定的閾值很容易產生不正確的簇;
2)錯誤的匹配將導致糟糕的重建;
3)目前沒有魯棒的RANSAC方法來確認線簇的inliers。
因此,ELSR從聚類中提取代表性的行,而不是合并它們,這可能更穩健和高效。
提取包含兩個步驟:
1)計算3D線之間的空間相似性;
2)基于其與其他線的空間相似度,在所有視圖中抽象出具有代表性的3D線
實驗: 在五個數據集上與四種現有方法比較評估了其ELSR。
表1是用到的數據集: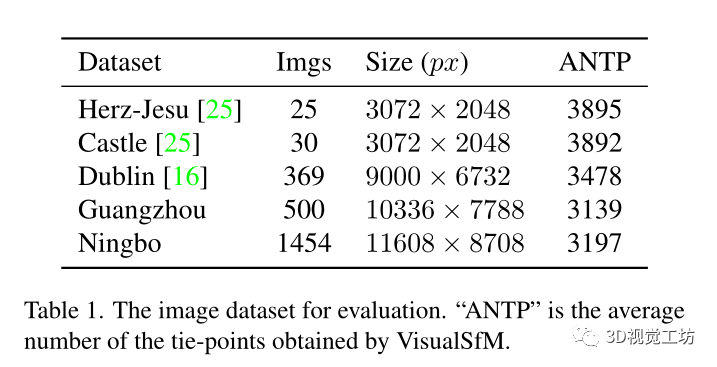
這是通過VisualSFM獲得的相機位姿和稀疏點云: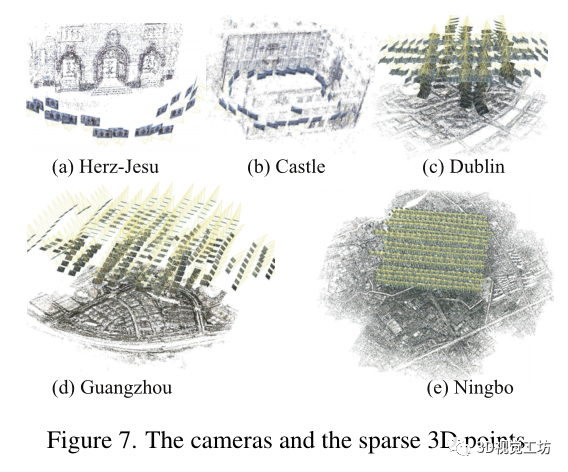
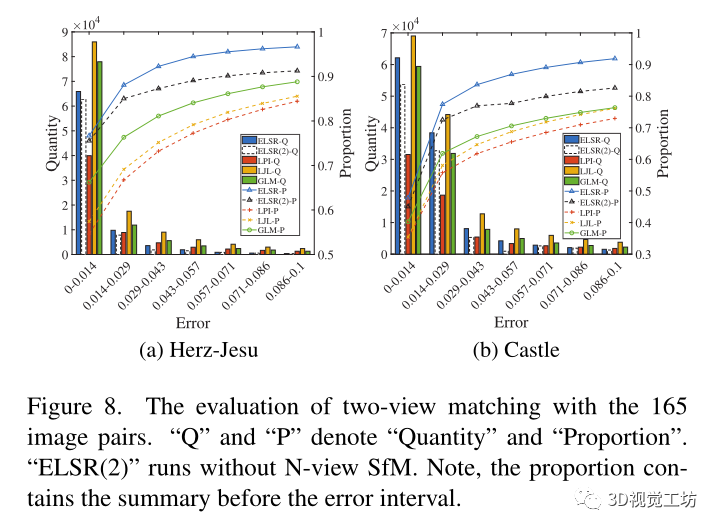
在兩視圖線匹配上,與LPI、LJL、GLM進行了比較: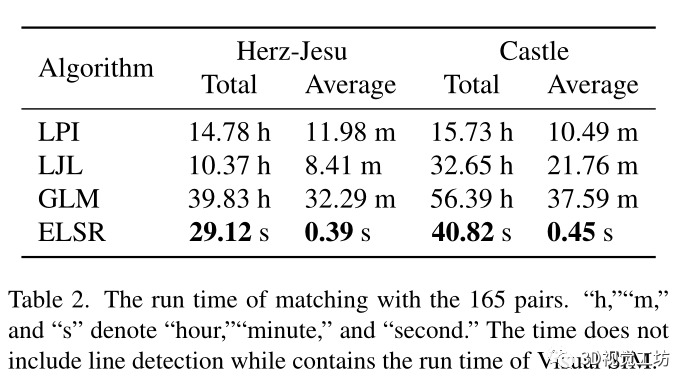
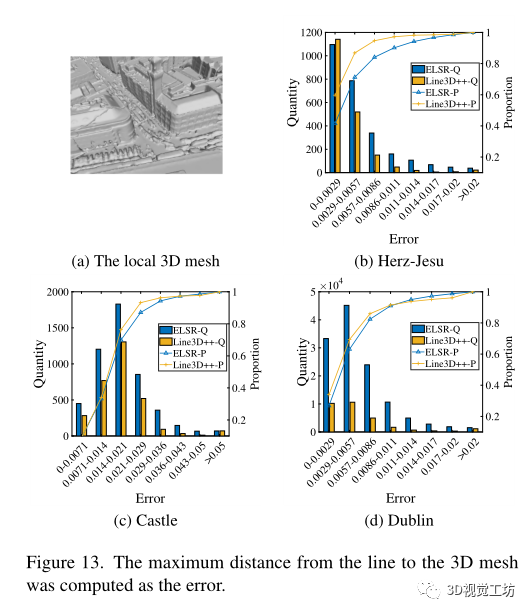
在線云重建上,與Line3D++進行了比較: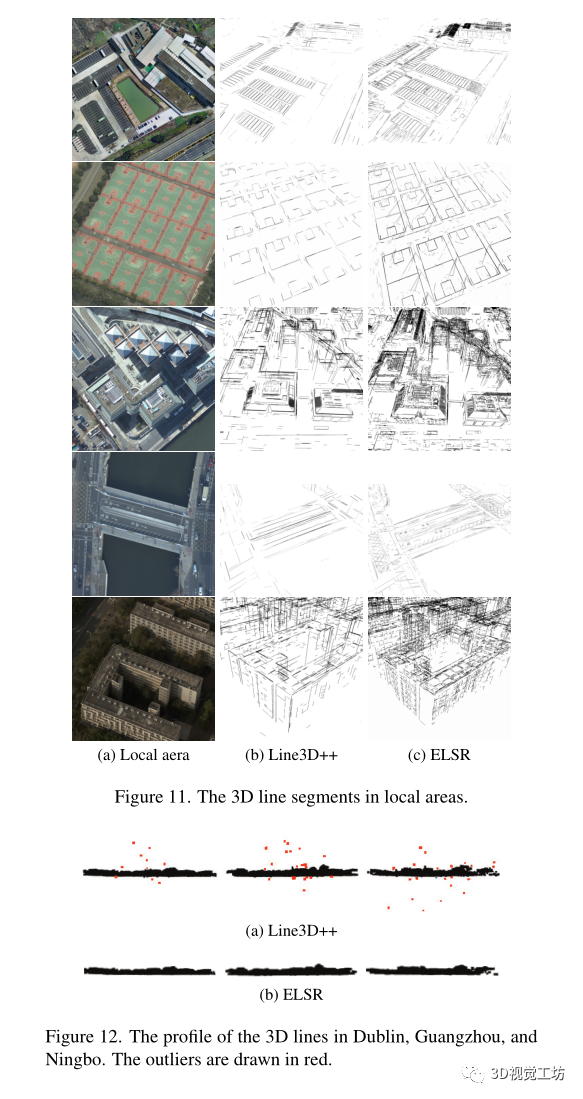
審核編輯:劉清
-
RANSAC
+關注
關注
0文章
10瀏覽量
7912
原文標題:ELSR:一種高效的線云重建算法
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
一種基于高效采樣算法的時序圖神經網絡系統介紹
基于約束的地質網格曲面重建算法
一種解決函數優化問題的免疫算法
一種基于可視角度能量高效的路由算法
一種新穎實用的基于視覺導航的三維重建算法
一種基于散亂數據的自適應曲面重建算法
一種結合多階導數數據的視頻超分辨率重建算法

一種自適應加權編碼正則化重建算法
一種改進的基于LRC-SNN的圖像重建與識別算法






 工商網監
工商網監
評論