 門延遲類型介紹
門延遲類型介紹
門延遲類型
前兩節中所介紹的門級電路都是沒有延遲的,實際門級電路都是有延遲的。
Verilog 中允許用戶使用門延遲,來定義輸入到其輸出信號的傳輸延遲。
門延遲類型主要有以下 3 種。
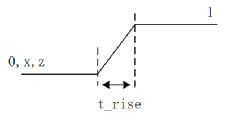
上升延遲
在門的輸入發生變化時,門的輸出從 0,x,z 變化為 1 所需要的轉變時間,稱為上升延遲。
下降延遲
在門的輸入發生變化時,門的輸出從 1,x,z 變化為 0 所需要的轉變時間,稱為下降延遲。

關斷延遲
關斷延遲是指門的輸出從 0,1,x 變化為高阻態 z 所需要的轉變時間。

門輸出從 0,1,z 變化到 x 所需要的轉變時間并沒有被明確的定義,但是它所需要的時間可以由其他延遲類型確定,即為以上 3 種延遲值中最小的那個延遲。
門延遲可以在門單元例化時定義,定義格式如下:
gate_type [delay] [instance_name] (signal_list) ;
其中,delay 的個數可以為 0 個、1 個、2 個或 3個 。
下表為不同延遲個數時,各種類型延遲的取值情況說明。
| 延遲類型 | 無延遲 | 1 個延遲 (d) | 2 個延遲 (d1, d2) | 3 個延遲 (d1, d2, d3) |
|---|---|---|---|---|
| 上升 | 0 | d | D1 | D1 |
| 下降 | 0 | d | D2 | D2 |
| 關斷 | 0 | d | 最小(D1, D2) | D3 |
| to_x | 0 | d | 最小(D1, D2) | 最小(D1, D2, D3) |
如果用戶沒有指定延遲值,則默認延遲為 0 。
如果用戶指定了 1 個延遲值,則所有類型的延遲值大小均為此值。
如果用戶指定了 2 個延遲值,則他們分別代表上升延遲和下降延遲,關斷和“to_x”延遲均為這 2 種延遲值中最小的那個。
如果用戶指定了 3 個延遲值,則他們分別代表上升延遲、下降延遲和關斷延遲,“to_x”延遲為這 3 種延遲值中最小的那個。
帶有延遲值的門級單元例化如下:
//rise, fall and turn-off delay are all 1
and #(1) (OUT1, IN1, IN2) ;
//rise delay = 2.1, fall dalay = 2, trun-off delay = 2
or #(2.1, 2) (OUT2, IN1, IN2) ;
//rise delay = 2, fall dalay = 1, trun-off delay = 1.3
bufif0 #(2, 1, 1.3) (OUT3, IN1, CTRL) ;
需要說明的是,多輸入門(如與門)和多輸出門(如非門)最多只能定義 2 個延遲,因為輸出不會是 z 。
三態門和單向開關單路(MOS 管、CMOS 管等)可以定義 3 個延遲。
上下拉門級電路不會有任何的延遲,因為它表示的是一種硬件屬性,上下拉狀態不會發生變化,且沒有輸出值。
雙向開關(tran)在傳輸信號時沒有延遲,不允許添加延遲定義。
帶有控制端的雙向開關(tranif1, tranif0)在開關切換的時候,會有開或關的延遲,可以給此類雙向開關指定 0 個、1 個或 2 個的延遲,例如:
//turn-on and turn-off delay are all 1
tranif0 #(1) (inout1, inout2, CTRL);
//turn-on delay = 1, turn-off delay = 1.2
tranif1 #(1, 1.2) (inout3, inout4, CTRL);
最小/典型/最大延遲
由于集成電路制造工藝的差異,實際電路中器件的延遲總會在一定范圍內波動。 Verilog 中,用戶不僅可以指定 3 種類型的門延遲,還可以對每種類型的門延遲指定其最小值、典型值和最大值。 在編譯或仿真階段,來選擇使用哪一種延遲值,為更切實際的仿真提供了支持。
最小值:門單元所具有的最小延遲。
典型值:門單元所具有的典型延遲。
最大值:門單元所具有的最大延遲。
下面通過例化實例,來說明最小、典型、最大延遲的用法。
//所有的延遲類型:最小延遲 1, 典型延遲 2, 最大延遲 3
and #(1:2:3) (OUT1, IN1, IN2) ;
//上升延遲:最小延遲 1, 典型延遲 2, 最大延遲 3
//下降延遲:最小延遲 3, 典型延遲 4, 最大延遲 5
//關斷延遲:最小延遲 min(1,3), 典型延遲 min(2,4), 最大延遲 min(3,5)
or #(1:2:3, 3:4:5) (OUT2, IN1, IN2) ;
//上升延遲:最小延遲 1, 典型延遲 2, 最大延遲 3
//下降延遲:最小延遲 3, 典型延遲 4, 最大延遲 5
//關斷延遲:最小延遲 2, 典型延遲 3, 最大延遲 4
bufif0 #(1:2:3, 3:4:5, 2:3:4) (OUT3, IN1, CTRL) ;
D 觸發器
下面從門級建模的角度,對 D 觸發器進行設計。
SR 觸發器
SR 觸發器結構圖及真值表如下所示。
1> 當 S 為低電平,G1 輸出端 Q 為高電平,并反饋到 G2 輸入端。 如果此時 R 為高電平,則 G2 輸出端 Q' 為低電平。
2> R 為低電平 S 為高電平時,分析同理。
3> S 與 R 均為高電平時,如果 Q = 1 (Q' = 0) , 則 Q 反饋到 G2 輸入端后輸出 Q' 仍然為 0, Q' 反饋到 G1 輸入端后輸出 Q 仍然是 1,呈現穩態。 如果 Q =0 (Q' = 1) 同理,Q 與 Q' 的值仍然會保持不變。 即 S 與 R 均為高電平時該電路具有保持的功能。
4> 如果 S 與 R 均為低電平,則輸出 Q 與 Q' 均為高電平,不再成互補的關系。 所以此種情況是禁止出現的。


SR 鎖存器
在基本的 SR 觸發器前面增加 2 個與非門,可構成帶有控制端 SR 鎖存器。
SR 鎖存器及其真值表如下所示。
當 EN=0 時,G3、G4 截止,SR 鎖存器保持輸出狀態不變。
當 EN=1 時,與基本的 SR 觸發器工作原理完全相同。


D 鎖存器
基本的 SR 觸發器輸入端不能同時為 0, 帶有控制端的 SR 鎖存器輸入端不能同時為 1,否則會導致輸出端 Q 與 Q' 的非互補性矛盾。
為消除此種不允許的狀態,在帶有控制端的 SR 鎖存器結構中加入取反模塊,保證 2 個輸入端均為相反邏輯,則形成了 D 鎖存器。
其結構圖和真值表如下所示。
1> 當 EN=1 時,輸出狀態隨輸入狀態的改變而改變。
2> 當 EN=0 時,輸出狀態保持不變。


D 鎖存器是一種電平觸發。
如果在 EN=1 的有效時間內,D 端信號發生多次翻轉,則輸出端 Q 也會發生多次翻轉。 這降低了電路的抗干擾能力,不是實際所需求的安全電路。
為提高觸發器的可靠性,增強電路抗干擾能力,發明了在特定時刻鎖存信號的 D 觸發器。
D 觸發器
將兩個 D 鎖存器進行級聯,時鐘取反,便構成了一種簡單的 D 觸發器,又名 Flip-flop。
其結構圖和真值表如下所示。
第一級 D 鎖存器又稱為主鎖存器,在 CP 為低電平時鎖存。 第二級 D 鎖存器又稱為從鎖存器,時鐘較主鎖存器相反,在 CP 為高電平時鎖存。


1> CP=1 時,主鎖存器輸出端 Qm 會和 D 端信號的變化保持一致,而從鎖存器處于保持狀態,輸出 Qs 保持不變。
2> CP由高電平變為低電平時,主鎖存器鎖存當前 D 的狀態,傳遞到輸出端 Qm 并保持不變。 而從鎖存器輸出端 Qs 會和 Qm 的變化保持一致。 此時處于鎖存狀態下的主鎖存器輸出端 Qm 會保持不變,所以 D 觸發器輸出端 Qs 端得到新的 Qm 值后, 也會保持不變。
綜上所述,D 觸發器輸出端 Qs 只會在時鐘 CP 下降沿對 D 端進行信號的鎖存,其余時間輸出端信號具有保持的功能。
將雙級 D 鎖存器展開為門級結構,如下圖所示。

對 D 觸發進行門級建模,并加入門級延時,verilog 模型如下:
module D_TRI(
input D, CP,
output Q, QR);
parameter RISE_TIME = 0.11 ;
parameter FALL_TIME = 0.07 ;
//part1, not gate
wire CPN, DN ;
not #(RISE_TIME, FALL_TIME) (CPN, CP);
not #(RISE_TIME, FALL_TIME) (DN, D);
//part2, master trigger
wire G3O, G4O ;
nand #(RISE_TIME, FALL_TIME) (G3O, D, CP);
nand #(RISE_TIME, FALL_TIME) (G4O, DN, CP);
wire #(RISE_TIME, FALL_TIME) G1O, G2O ;
nand #(RISE_TIME, FALL_TIME) (G1O, G3O, G2O);
nand #(RISE_TIME, FALL_TIME) (G2O, G4O, G1O);
//part3, slave trigger
wire G7O, G8O ;
nand #(RISE_TIME, FALL_TIME) (G7O, G1O, CPN);
nand #(RISE_TIME, FALL_TIME) (G8O, G2O, CPN);
wire G5O, G6O ;
nand #(RISE_TIME, FALL_TIME) (G5O, G7O, G6O);
nand #(RISE_TIME, FALL_TIME) (G6O, G8O, G5O);
assign Q = G5O ;
assign QR = G6O ;
endmodule
testbench 編寫如下:
`timescale 1ns/1ps
module test ;
reg D, CP = 0 ;
wire Q, QR ;
always #5 CP = ~CP ;
initial begin
D = 0 ;
#12 D = 1 ;
#10 D = 0 ;
#14 D = 1 ;
#3 D = 0 ;
#18 D = 0 ;
end
D_TRI u_d_trigger(
.D (D),
.CP (CP),
.Q (Q),
.QR (QR));
initial begin
forever begin
#100;
//$display("---gyc---%d", $time);
if ($time >= 1000) begin
$finish ;
end
end
end
endmodule
仿真結果如下。
由圖可知,Q/QR 信號均在時鐘 CP 下降沿采集到了 D 端信號,并在單周期內保持不變,且輸出有延遲。

對 cap3 時刻進行放大,對延時進行追蹤,如下圖所示。
CP 端到 CPN 端有上升延遲,時間為 110ps;
CPN 端到 G8O 端有下降延遲,時間為 70ps;
G8O 端到 G6O 端有上升延遲,時間為 110ps;
G6O 端到 Q 端有下降延遲,時間為 70ps;
共 360ps,符合設置的門延遲。

-
仿真
+關注
關注
50文章
4048瀏覽量
133431 -
信號
+關注
關注
11文章
2781瀏覽量
76648 -
Verilog
+關注
關注
28文章
1345瀏覽量
109995 -
時鐘
+關注
關注
10文章
1721瀏覽量
131378 -
門級電路
+關注
關注
0文章
15瀏覽量
1956
發布評論請先 登錄
相關推薦
PlanAhead報告時間:路徑延遲類型代表什么?
如何檢查AND門的邏輯門?
智能鎖廠家諾托告訴你不同類型的門如何搭配智能鎖
Xilinx Vivado I/O延遲約束介紹
Verilog HDL提供了哪兩種類型的顯式時序控制

SystemVerilog/Verilog中的各種延遲模型
基本邏輯門的類型及其用途





 工商網監
工商網監
評論