 NeRF2NeRF神經輻射場的配對配準介紹
NeRF2NeRF神經輻射場的配對配準介紹
大家好,今天要介紹的論文是來自多倫多大學和谷歌研究室的NeRF2NeRF:神經輻射場的配對配準。
摘要 我們介紹了一種神經場成對配準的技術,它擴展了基于優化的經典局部配準(即ICP)以操作神經輻射場(NeRF)。
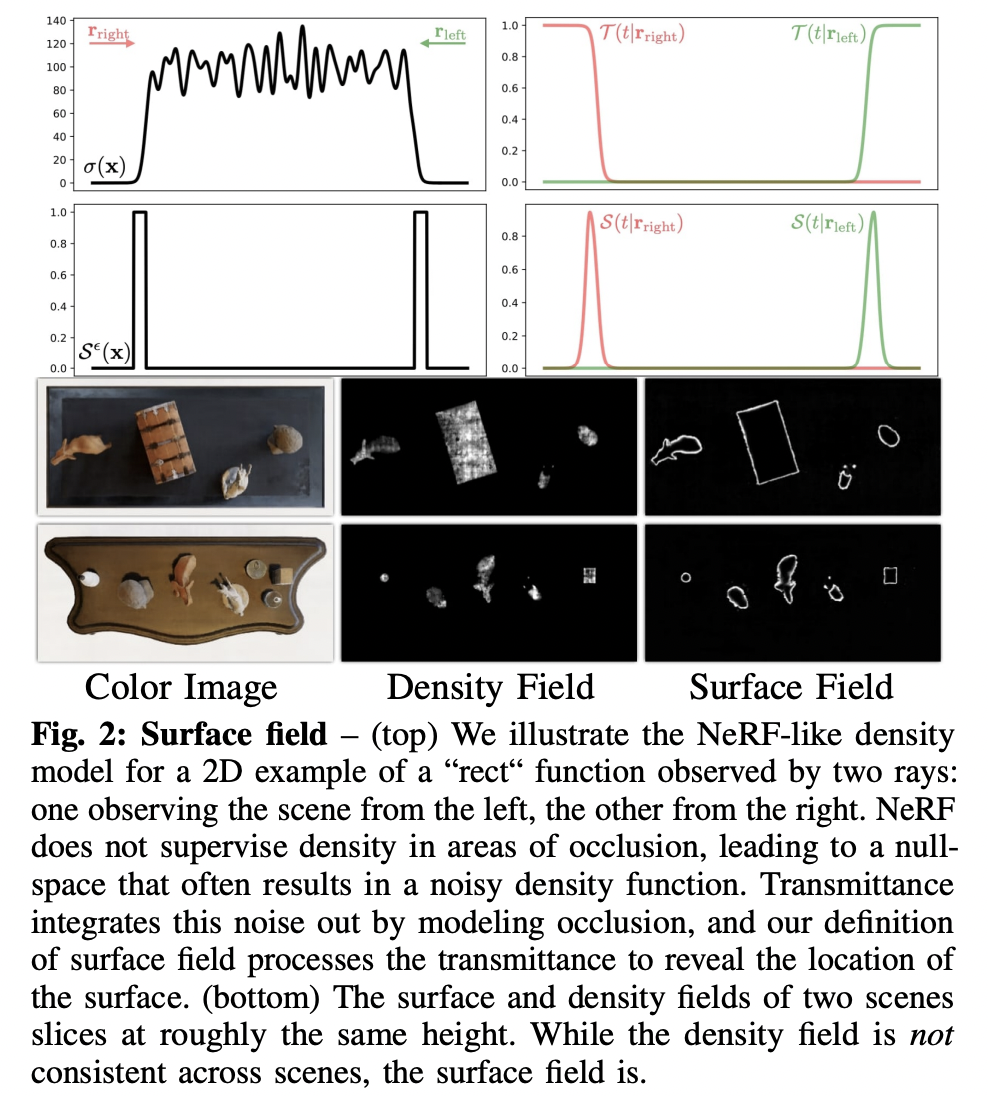
NeRF不分解光照和顏色,因此為了使配準不受光照影響,我們引入了 "表面場 "的概念(Surface Field)--從預先訓練的NeRF模型中提煉出來的場,用于測量一個點在物體表面的概率。
然后,我們將nerf2nerf配準作為一個穩健的優化,迭代地尋求一個剛性的變換,使兩個場景的表面場對齊。
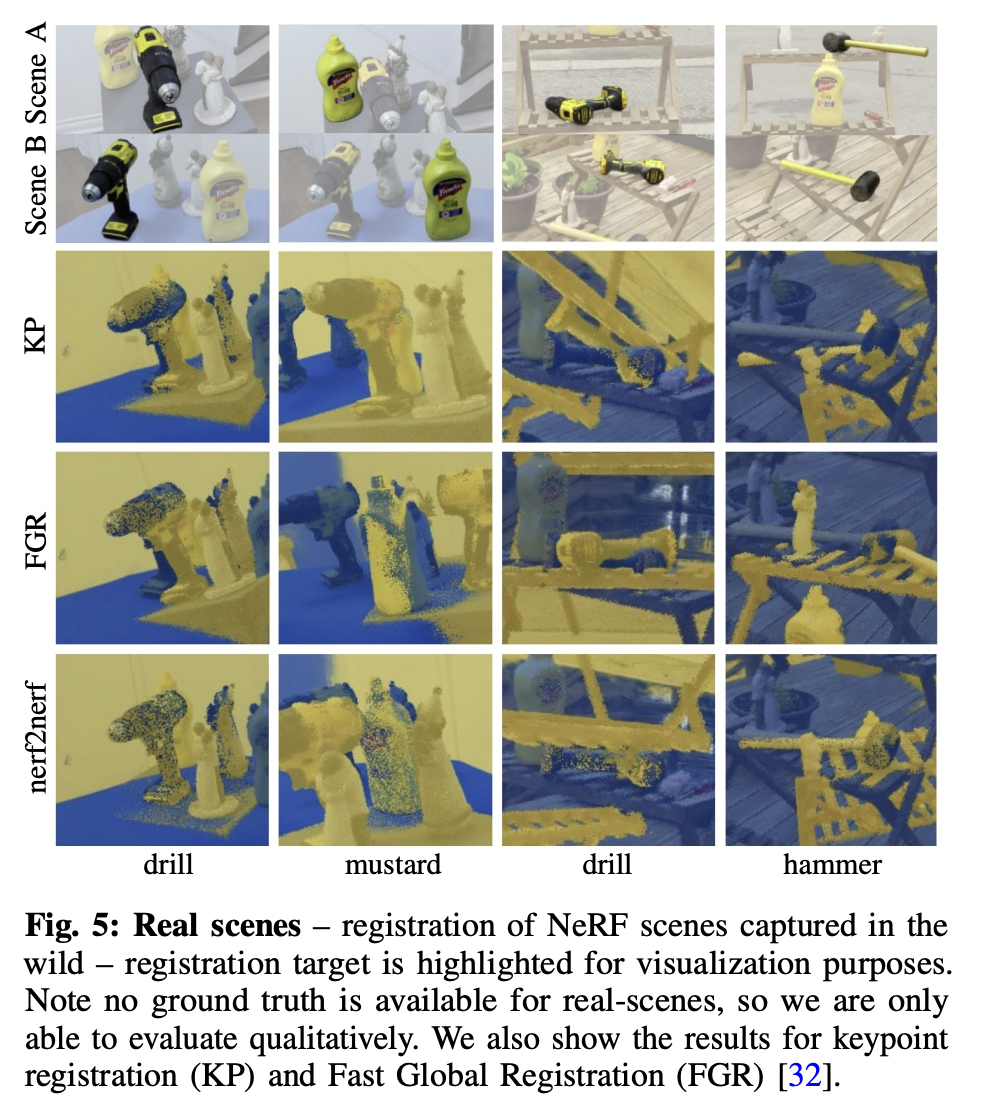
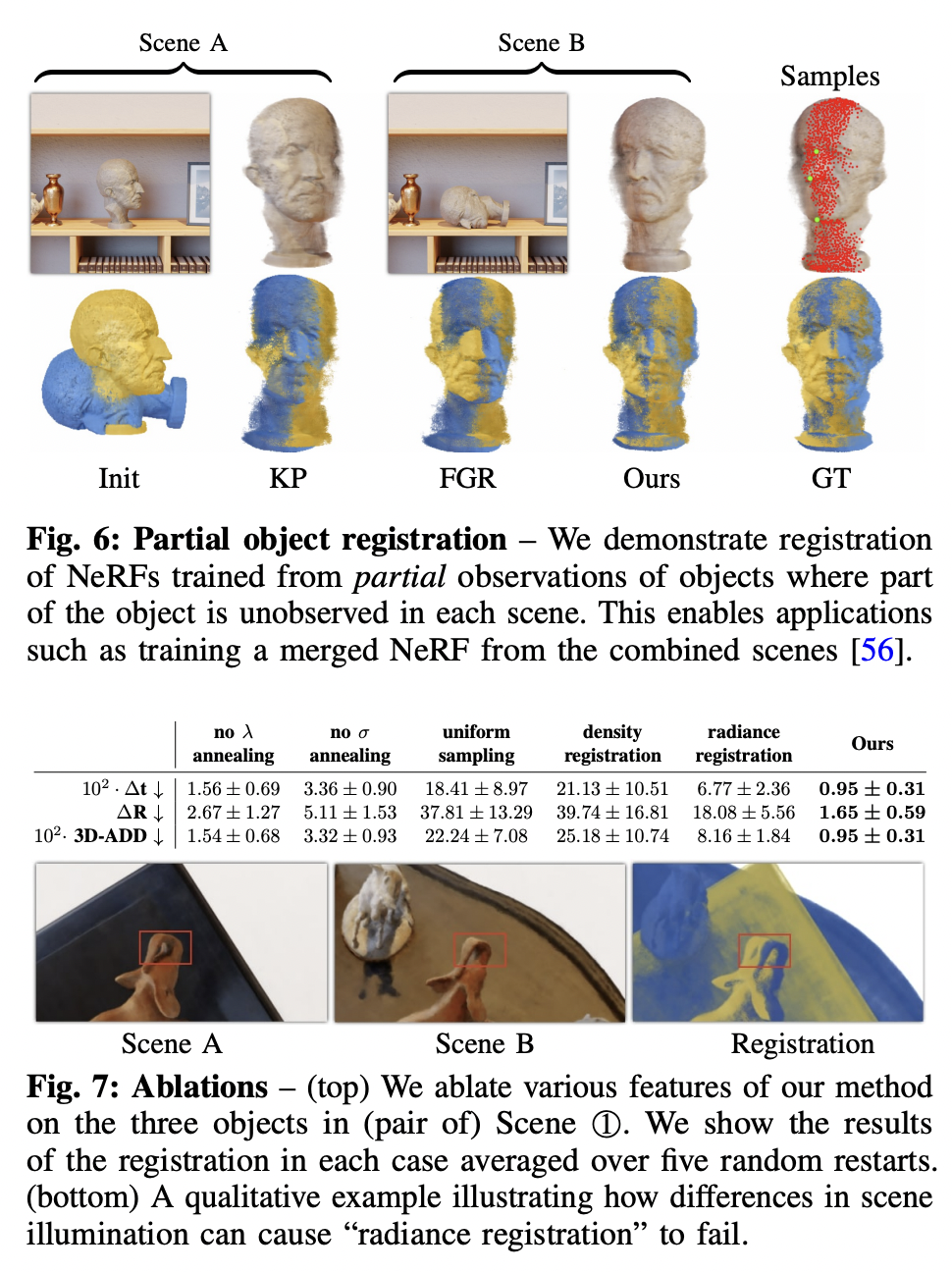
我們通過引入預訓練的NeRF場景數據集來評估我們技術的有效性--我們的合成場景能夠進行定量評估并與經典的配準技術進行比較,而我們的真實場景則證明了我們的技術在真實世界場景中的正確性。
主要貢獻
提出了一種對包含同一物體的兩個場景的NeRFs進行配準的方法。
引入表面場作為一個點在物體表面的概率進行配準。
在幾個相應的點上對準初始化后,使用NeRF場進行高精度優化。
主要方法: 使用NeRF進行定位主要存在以下問題:
由于色彩信息在不同場景中不一致導致照明和顏色不能分開。
由于物體內部的密度場是有噪聲的,沒有對閉塞區的密度進行監測的方法。
本文使用的方法是通過使用響應對象表面的場的概率來保持一致性,用以配準兩個不同神經場下的場景。
表面場:表面場的主要作用是對渲染過程中透明度變化較大的區域做出反應,假設相機的位置在物體之外,搜索來自每個相機的射線,計算每個參考相機的 "短間隔內的透明度變化",并使用最大值作為"表面場"。
最大值被用作表面場。

設計了一個目標函數,使兩個場景之間的坐標變換[R,t]得到優化,這里使用場景之間對應點的表面場值的殘差: 
用高斯分布對表面場進行卷積,并對其進行平滑處理。
主要結果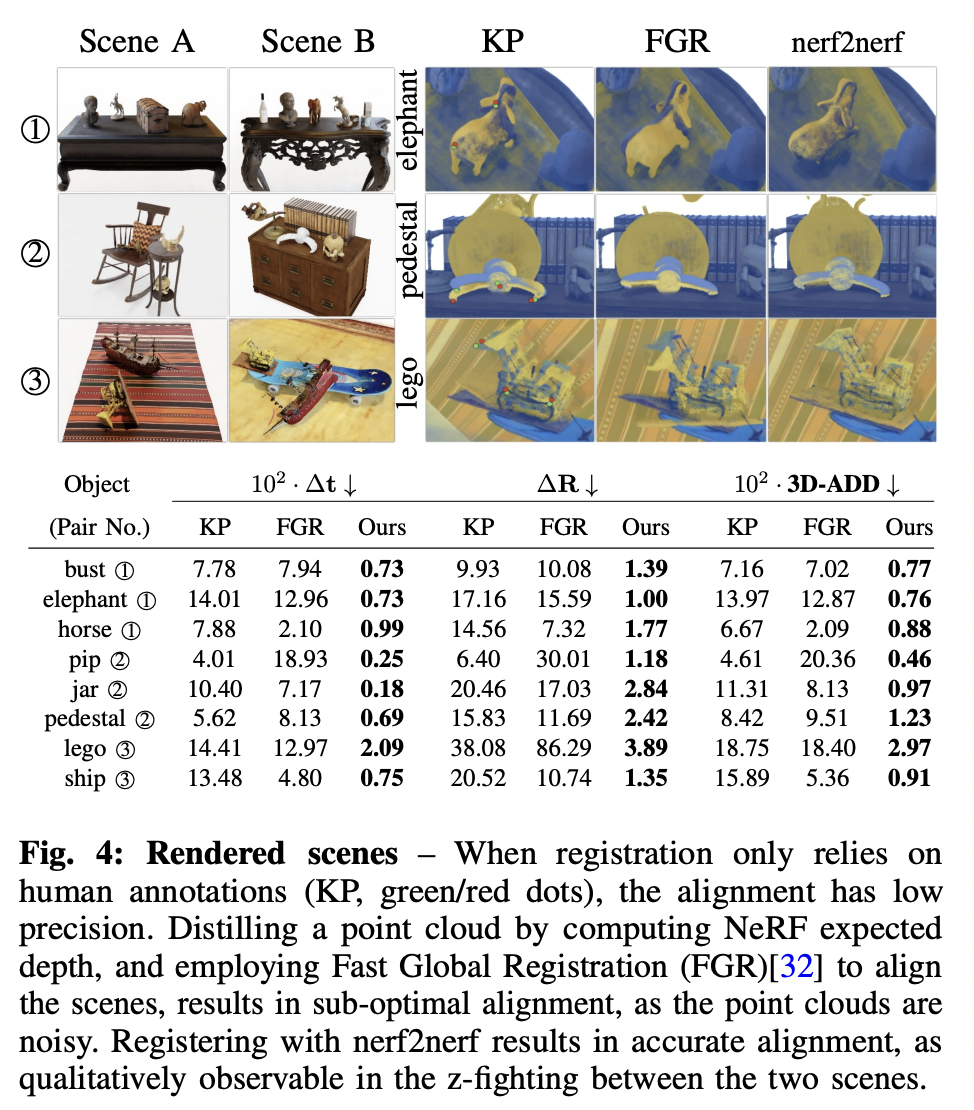
 ?
?
審核編輯:劉清
-
卷積網絡
+關注
關注
0文章
42瀏覽量
2158
原文標題:NeRF2NeRF:神經輻射場的配對配準
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦

MG-SLAM:融合結構化線特征優化高斯SLAM算法

8線卡接式配線模塊詳細介紹
天準科技發布國內首臺40nm明場納米圖形晶圓缺陷檢測設備
京準電鐘:GPS時鐘服務器(NTP授時服務器)資料詳細介紹書

LiDAR4D:基于時空新穎的LiDAR視角合成框架
什么是SLAM?基于3D高斯輻射場的SLAM優勢分析

基于NeRF/Gaussian的全新SLAM算法

動態自動駕駛數據量身定制的NeRF:NeuRAD

Aleth-NeRF:低光增強與曝光糾正的新方向!不良光照場景下的新視角合成






 工商網監
工商網監
評論