 基于simulink的異步電機矢量控制的SVPWM和滯環調制對比
基于simulink的異步電機矢量控制的SVPWM和滯環調制對比
導讀: 本期主要介紹異步電機矢量控制在滯環CHBPWM調制和SVPWM調制下的控制性能對比。
一、引言
應用PWM控制技術的變壓變頻器通常為電壓源型,它可以根據所需的設計參數來控制輸出電壓。對于交流電機而言,需要保證其輸出電流為正弦波電流,因為只有在交流電機繞組中通入三相平衡的正弦電流才能使其合成的電磁轉矩為不含脈動分量的恒定電磁轉矩。所以,要對電流采用閉環控制的方法,這比電壓開環控制能獲得更好的性能。傳統SPWM控制技術并未考慮到輸出電流的情況,它主要是使得變壓變頻器的輸出電壓為正弦波。電流滯環跟蹤控制PWM (CHBPWM),直接控制輸出電流使其接近于正弦波。而異步電動機為了在電機內產生旋轉的圓形磁場,從而發出恒定電磁轉矩,所以需要向異步電機輸入三相交流電源。根據這一特性,若將逆變器和異步電機視為整體,按照跟蹤圓形旋轉磁場來控制逆變器的工作狀態,其響應能力會更好,這種方式又稱為磁鏈跟蹤控制,即電壓空間矢量PWM(SVPWM)控制技術。
為了更好地對異步電機在不同控制策略下的運行特性,本文采用Matlab/Simulink軟件設計了電流滯環跟蹤控制技術以及電壓空間矢量控制技術的數學模型并加以實施在異步電機上,對異步電機在兩種控制方式下的運行特性進行對比分析。
二、滯環和SVPWM調制策略
2.1 電流滯環跟蹤控制PWM技術
滯環電流控制基本思想就是給定三相電流信號,并且與由電流傳感器實測的三相電流相比較,以其差值通過滯環比較器來控制功率開關使實際電流值跟蹤上參考電流值。
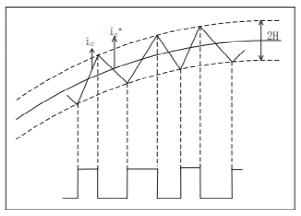
圖1 滯環電流跟蹤控制
圖1為滯環電流跟蹤控制的原理圖,H為滯環比較器的環寬。在工作時ic_ref 與ic做差,得到的誤差電流 ic 且始終處于以 0 為中心,H和 -H 為上下限的滯環內。H的設置是為了避免逆變器開關狀態變換的速度過快,在ic_ref的基礎上設計了上下兩個寬度為h的誤差滯環。
具體工作過程為:當ic_ref- ic > H時,滯環比較器輸出高電平,驅動上橋臂的開關器件S1導通,使ic增大,當ic增加到與ic_ref相等時,滯環比較器仍然輸出高電平,S1保持導通,ic繼續增大;當ic - ic_ref > H時,滯環比較器翻轉,輸出低電平信號關斷S1,并經過死區時間后驅動下橋臂的開關S4.但此時S4未必導通,因為ic(負載電流)并未反向,而是通過續流二極管D4維持原方向流通,其數值逐漸減小。
通過滯環控制,逆變器的實際輸出電流與給定值的偏差保持在-h~h之間,在給定電流上下做鋸齒狀變化。當給定電流為正弦波時,輸出電流也十分接近正弦波。
滯環電流控制法具有控制精度高,響應速度快,電流跟蹤能力強等優點。但是滯環寬度 H 的選取合適與否,會直接影 響補償電流跟蹤指令電流,進而影響諧波補償效果且滯環電流控制因為電流紋波大,開關頻率不確定,所以很少被采用。
2.2 電壓空間矢量脈寬調制技術(SVPWM)
在傳統的PWM變壓變頻調速系統中,通常使用六拍階梯波逆變器為交流電機提供電源。此時的電壓空間矢量運動軌跡如圖2所示,三相逆變器—異步電機調速系統主電路原理圖如圖3所示。
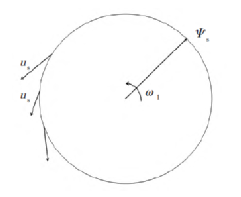
圖2 旋轉磁場與電壓空間矢量的運動軌跡
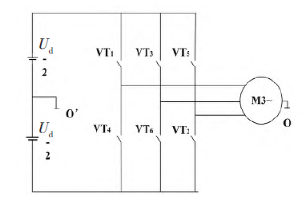
圖3 三相逆變器-交流電機主電路原理圖
逆變器采用的是上、下管換流方式,功率管共有八種工作狀態。對于這種六拍階梯波的逆變器而言,輸出的每個周期都會出現一次有效工作狀態且狀態切換間隔為π/3。為了便于討論將正六邊形電壓矢量轉換為放射形式,如圖4所示。各電壓空間矢量間的相位關系仍然不變,這樣可把逆變器的工作周期劃分為6個扇區。
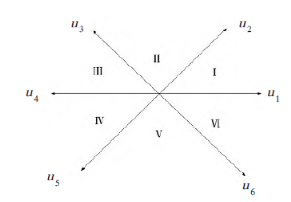
圖4 電壓空間矢量的6個扇區
在一個周期內,逆變器開關狀態序列為100, 110,111,000,000,111,110,100。在實際工程中,系統應盡量減少開關狀態變化是引起的損耗,因此在每次切換開關狀態時,只切換一個開關器件,以滿足最小的開關損耗。
綜上可知,SVPWM控制模式的特點為:一個工作周期分為了6個扇區,為了使電機旋轉磁場逼近圓形使得其控制方式依賴于開關頻率的設定。開關切換合理,損耗較小。每個狀態的切換以零電壓開始,又以零電壓結束。采用SVPWM控制方式時,輸出側的線電壓基波最大值為直流側電壓,提高了輸出能力。
本節討論了SVPWM控制技術的原理基礎,并對其工作特性進行了動態分析,為后面的仿真對比做出了鋪墊。
三、仿真模型搭建
異步電機定子側為三相繞組,轉子側為閉合的導電條,二者之間通過對氣隙磁場的耦合作用進行工作。因此在對異步電機進行仿真時可以通過坐標變換的方式來進行解耦以使其具有和直流電機相似的調速特性。本文以Matlab/Simulink為仿真工具來對異步電機的電流滯環控制以及電壓空間矢量控制方式進行對比分析。設定直流電壓為540V,異步電機極對數為2,轉動慣量為0.067kg·m,仿真時長1s。
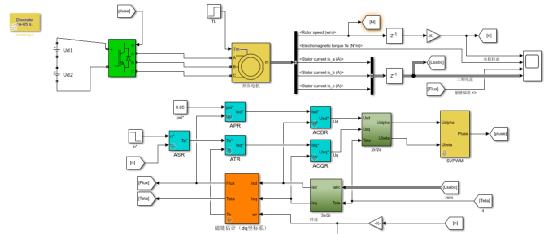
圖5 基于SVPWM的異步電機矢量控制系統仿真
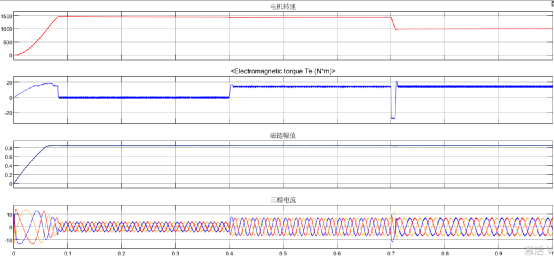
圖6 基于SVPWM的異步電機矢量控制系統仿真波形變化情況
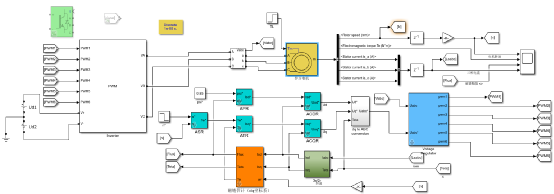
圖7 基于CHBPWM的異步電機矢量控制系統仿真
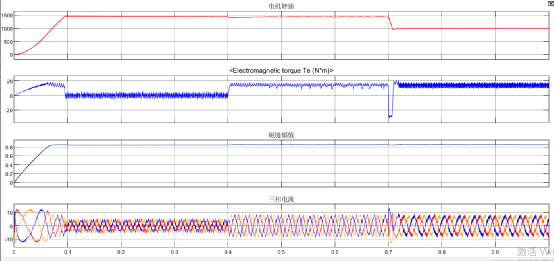
圖8 基于CHBPWM的異步電機矢量控制系統仿真波形變化情況
通過圖6和圖8的波形對比,基于SVPWM的異步電機矢量控制系統的轉矩紋波要小很多且在加載和轉速突變的情況下,定子電流更趨于正弦。
四、總結
綜上是對異步電機的工作特點進行分析,說明電流滯環控制以及空間矢量控制技術(SVPWM)的控制原理。使用Matlab/Simulink軟件以上述兩種控制方式對異步電機的仿真結果進行分析研究,實驗證明:在SVPWM控制方式下的異步電機的穩定性更高、響應速度更快。
審核編輯:湯梓紅
-
變頻器
+關注
關注
251文章
6504瀏覽量
144251 -
PWM
+關注
關注
114文章
5144瀏覽量
213403 -
異步電機
+關注
關注
6文章
427瀏覽量
32819 -
Simulink
+關注
關注
22文章
522瀏覽量
62307 -
SVPWM
+關注
關注
14文章
614瀏覽量
90583
原文標題:基于simulink的異步電機矢量控制的SVPWM和滯環調制對比1
文章出處:【微信號:淺談電機控制,微信公眾號:淺談電機控制】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
異步電機的無速度傳感矢量控制設計
異步電機直接轉矩控制simulink仿真教程
基于三電平SVPWM發波的異步電機矢量控制學習






 工商網監
工商網監
評論