") 毫米波傳感器將全新智能化引入工業(yè)應(yīng)用
毫米波傳感器將全新智能化引入工業(yè)應(yīng)用
從定位和鄰近度測(cè)量,到確定液面位置和光照強(qiáng)度,傳感器解決方案為我們提供了一個(gè)感測(cè)、數(shù)字化表達(dá)和處理周圍世界的途徑。特定的應(yīng)用問(wèn)題已經(jīng)催生出大量不同的傳感器技術(shù),使得系統(tǒng)能夠在各種各樣的條件下,以不同的精度等級(jí)來(lái)感測(cè)周圍情況。隨著近期智能基礎(chǔ)設(shè)施的興建,工廠內(nèi)的工業(yè)4.0 (Industry 4.0)、樓宇自動(dòng)化產(chǎn)品,以及自動(dòng)駕駛無(wú)人機(jī)等更新型應(yīng)用的興起,開發(fā)人員正期待傳感器能夠?qū)⑾到y(tǒng)性能和效率提升到全新水平。
設(shè)備上配備的毫米波 (mmWave) 雷達(dá)技術(shù)專門用來(lái)在短距離 (5cm) 到長(zhǎng)距離(150m以上)范圍內(nèi)實(shí)現(xiàn)探測(cè)功能,這項(xiàng)技術(shù)本身可以探測(cè)快速運(yùn)動(dòng)物體(速度高達(dá)300kph)的范圍、速率和運(yùn)動(dòng)角度,而它的精度不受周圍光照、下霧、降雨和灰塵的影響。圖1是范圍、速率和運(yùn)動(dòng)角度信息的可視化示例。
毫米波傳感器技術(shù)在汽車領(lǐng)域非常成功,不過(guò)設(shè)計(jì)人員目前正在解決這項(xiàng)技術(shù)擴(kuò)展至其它市場(chǎng)時(shí)所面臨的挑戰(zhàn),比如說(shuō)樓宇和工廠自動(dòng)化應(yīng)用領(lǐng)域。所遇到的問(wèn)題是,此前的雷達(dá)系統(tǒng)都是分立式設(shè)計(jì),導(dǎo)致了復(fù)雜的硬件設(shè)計(jì)和軟件開發(fā),提高了準(zhǔn)入門檻。

圖1:一個(gè)停車場(chǎng)內(nèi)來(lái)自毫米波傳感器的范圍、速率和角度信息:藍(lán)色背景圖表是范圍/速率熱圖(在這幅圖中,你可以識(shí)別出移動(dòng)/靜止的物體和它們的速率);綠色背景圖表是范圍/角度可視化圖;彩色方框標(biāo)出了場(chǎng)景和圖表內(nèi)移動(dòng)和靜止的車輛及行人
圖2顯示的是一個(gè)分立式毫米波雷達(dá)系統(tǒng)。一個(gè)雷達(dá)信號(hào)處理鏈需要多個(gè)集成電路 (IC) 組件,其中包括一個(gè)射頻 (RF) 前端和一個(gè)數(shù)字處理后端。設(shè)計(jì)分立式雷達(dá)系統(tǒng)需要給予特別的關(guān)注,并且要考慮多個(gè)注意事項(xiàng),以解決在一塊印刷電路板 (PCB) 上發(fā)送高速雷達(dá)數(shù)據(jù)的問(wèn)題,諸如微控制器單元 (MCU) 等的中央控制器必須將控制信號(hào)按照一定路線發(fā)送給這些獨(dú)立組件。這些系統(tǒng)對(duì)于外部電磁干擾 (EMI) 非常敏感,這使它們很難針對(duì)特定的“嘈雜”環(huán)境和挑戰(zhàn)性更高的室外環(huán)境進(jìn)行設(shè)計(jì) 。
分立式雷達(dá)系統(tǒng)也對(duì)軟件設(shè)計(jì)人員提出了挑戰(zhàn)。主機(jī)MCU的配置和控制信號(hào)需要發(fā)送至每個(gè)RF和數(shù)字處理組件,以確保系統(tǒng)能夠針對(duì)不斷變化的環(huán)境條件和應(yīng)用需求最優(yōu)地控制每個(gè)組件,而這需要大量的軟件設(shè)計(jì)和開發(fā)策略。
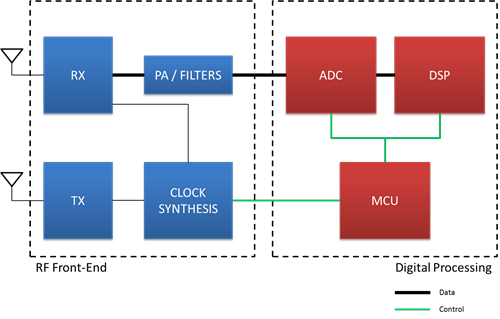
圖2:分立式毫米波雷達(dá)系統(tǒng)示例。每個(gè)彩色方框代表射頻前端或數(shù)字處理后端內(nèi)的一個(gè)獨(dú)立IC或一組IC
如圖3所示,TI的單芯片IWR1x 毫米波傳感器產(chǎn)品組合將毫米波雷達(dá)射頻技術(shù)與強(qiáng)大的ARM? MCU和TI數(shù)字信號(hào)處理 (DSP) 集成在一起,實(shí)現(xiàn)了簡(jiǎn)單的單芯片解決方案,降低了毫米波感測(cè)的準(zhǔn)入門檻。借助TI的單芯片10mmx10mm IWR1x傳感器,你不用再去處理分立式前端、模數(shù)轉(zhuǎn)換器和處理器件之間的復(fù)雜高速數(shù)據(jù)和通信走線,也不用處理額外尺寸、功率和支持它們的相關(guān)物料清單成本。這個(gè)集成度還簡(jiǎn)化了軟件設(shè)計(jì)過(guò)程,從而極大簡(jiǎn)化了器件配置、監(jiān)控和校準(zhǔn)。
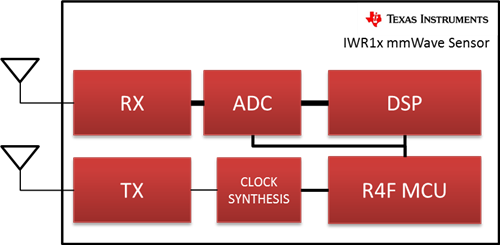
圖3:TI的IWR1x 毫米波傳感器將單芯片毫米波感測(cè)所必需的全部組件集成在一起,以簡(jiǎn)化硬件和軟件設(shè)計(jì)。
毫米波對(duì)應(yīng)用的影響
液位感測(cè)是工廠內(nèi)倉(cāng)儲(chǔ)和測(cè)量不同化學(xué)品的一個(gè)重要部分。由于這些化學(xué)品具有腐蝕性或毒性,必須在非直接接觸的情況下測(cè)量剩余的液體體積。mmWave感測(cè)提供高精度測(cè)量值,并且在灰塵、煙霧或極端溫度等環(huán)境條件下具有穩(wěn)健耐用性。IWR1x 射頻前端是高度線性的,其超寬(連續(xù)4GHz,5GHz拼接)帶寬可以在深度1m至80m的液罐內(nèi)實(shí)現(xiàn)極精確的亞毫米測(cè)量值。針對(duì)77GHz級(jí)發(fā)射器參考設(shè)計(jì)的功率優(yōu)化設(shè)計(jì)給出了如何優(yōu)化在4-20mA功率受限系統(tǒng)內(nèi)運(yùn)行的IWR1443。
交通監(jiān)控基礎(chǔ)設(shè)施的目的在于,通過(guò)掌握與車輛和行人有關(guān)的特定信息和遙感數(shù)據(jù),對(duì)路口的情況做出及時(shí)應(yīng)對(duì),并且搜集交通統(tǒng)計(jì)數(shù)據(jù),以提高運(yùn)輸效率。毫米波傳感器可以實(shí)現(xiàn)對(duì)車輛位置和速率的測(cè)量,并且能夠探測(cè)速率高達(dá)300kph、距離在150m和更遠(yuǎn)范圍以外的物體。
無(wú)人機(jī)已被廣泛采用,從愛好者的飛行競(jìng)技,到大量行業(yè)內(nèi)的商業(yè)用途,比如包裹投遞和林業(yè)領(lǐng)域應(yīng)用。為了實(shí)現(xiàn)安全性、提高平臺(tái)的生產(chǎn)力,設(shè)計(jì)人員面臨諸多挑戰(zhàn),包括使無(wú)人機(jī)能夠探測(cè)障礙,并且在最危險(xiǎn)的飛行情況下為操作人員提供輔助。無(wú)人機(jī)要求高速物體探測(cè)功能,并且能夠在100m距離內(nèi)跟蹤大小為數(shù)厘米的物體,比如當(dāng)無(wú)人機(jī)接近地面或在物體周圍運(yùn)行時(shí)。由于無(wú)人機(jī)是由電池供電運(yùn)行的,為了延長(zhǎng)飛行時(shí)間和提高有效負(fù)載,解決方案應(yīng)尺寸小巧、重量輕。
目前提供的IWR1443BOOST和IWR1642BOOST評(píng)估模塊可以輕松評(píng)估毫米波雷達(dá)技術(shù),并且顯示如何在多種工業(yè)感測(cè)應(yīng)用中使用范圍、速率和角度數(shù)據(jù)。通過(guò)使用具有TI提供的mmWave軟件開發(fā)套件 (SDK) 的評(píng)估模塊,你可以運(yùn)行現(xiàn)成可用的演示程序,或者在幾分鐘內(nèi)為你的開發(fā)定制示例代碼。同時(shí)提供的還有示例源代碼,展示了TI高精度毫米波感測(cè)和處理的更多使用情況, 比如水體與地面之間的分類,以及心率和呼吸頻率的非接觸式測(cè)量。
審核編輯:郭婷
-
傳感器
+關(guān)注
關(guān)注
2548文章
50682瀏覽量
752021 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
783文章
13685瀏覽量
166150 -
毫米波傳感器
+關(guān)注
關(guān)注
3文章
104瀏覽量
11427
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論