 EtherCAT運動控制器中脈沖接口的快速調試與診斷
EtherCAT運動控制器中脈沖接口的快速調試與診斷
脈沖型驅動器試運行可借助ZDevelop軟件快速驗證,主要包含以下四個部分:硬件接線,ZDevelop連接控制器,配置軸參數,發送運動命令查看電機是否轉動。若無法運行參見問題排查部分解決。
01脈沖軸驅動器試運行流程
一、硬件接線
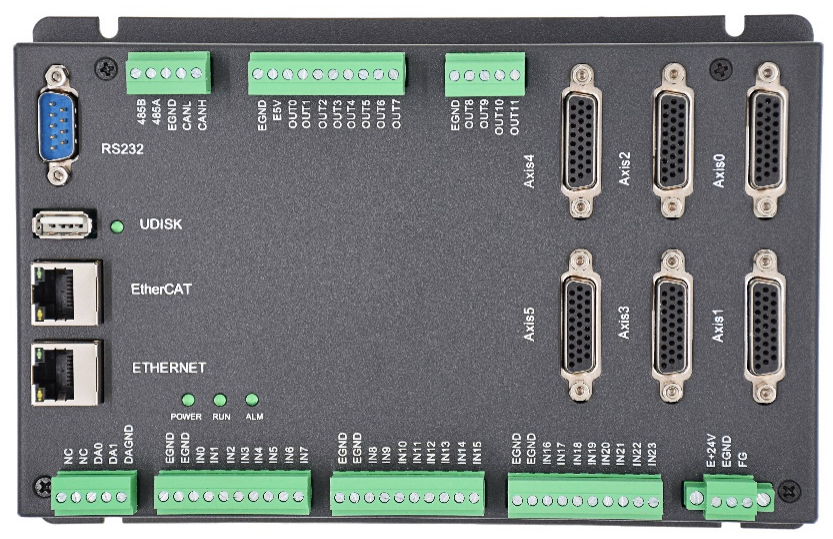
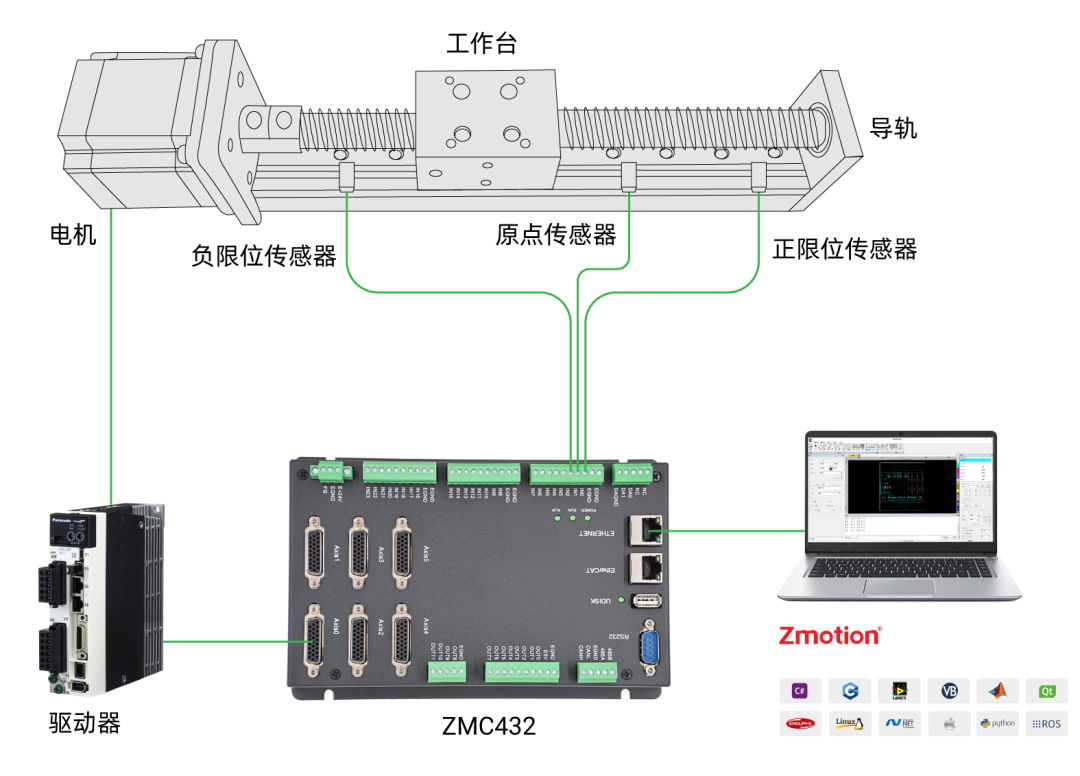
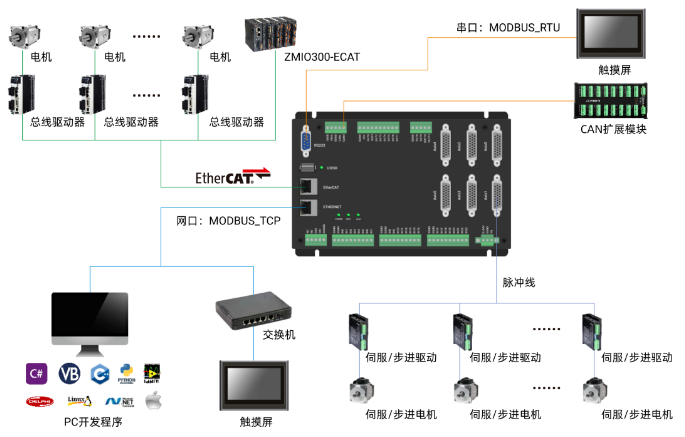
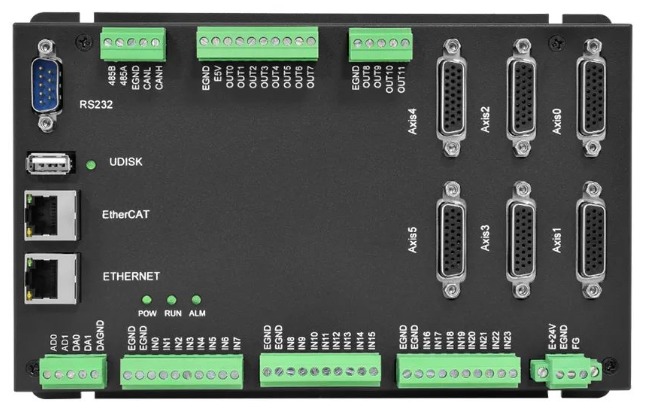
以ZMC432總線運動控制器為例,支持EtherCAT、EtherNET、RS232、RS485、CAN、U盤等通訊接口,觀察控制器上的硬件接口,控制器參考架構如下圖。 可通過EtherNET網口或RS232串口連接到ZDevelop軟件完成試運行。 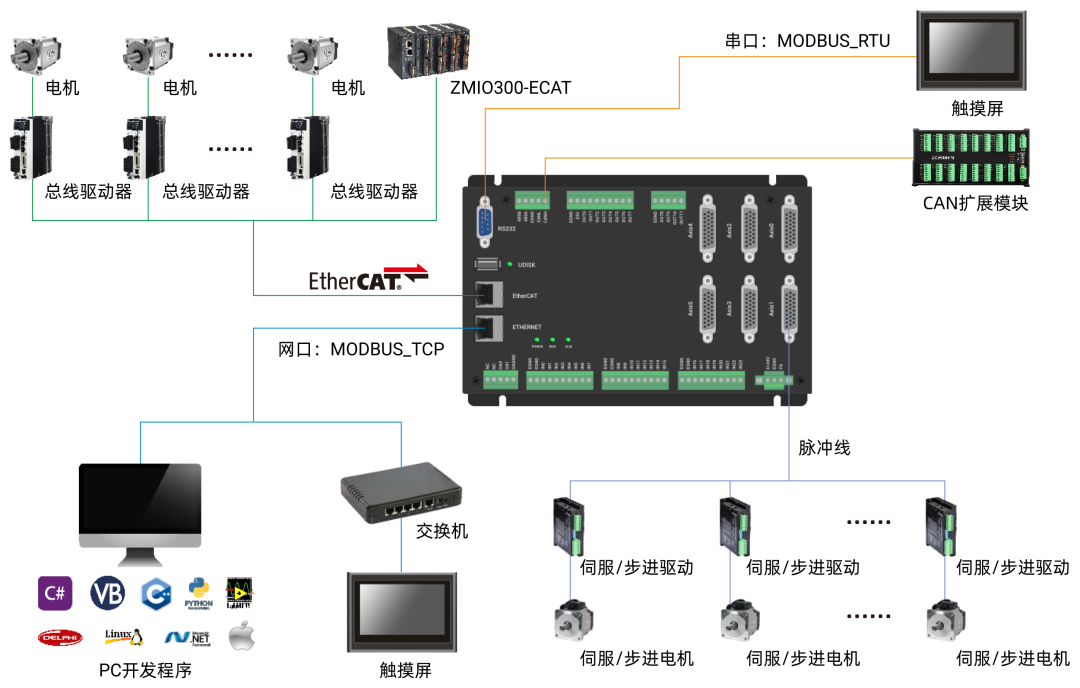 1.脈沖接口
1.脈沖接口
正運動技術大部分控制器的脈沖控制接口為面板上提供的DB26母頭的端子,例如下圖ZMC432的AXIS端子,板載6個脈沖軸的接口。
AIXS端子內主要包含脈沖輸出的接線端子,編碼器反饋的接線端子,驅動器的使能和報警信號,5V電源輸出和公共端,如下表所示。
| 針腳號 | 信號 | 說明 |
| 1 | EGND | 外部電源地 |
| 2 | IN24-29/ALM | 通用輸入,建議做驅動報警 |
| 3 | OUT12-17/ENABLE | 通用輸出,建議驅動使能 |
| 4 | EA- | 編碼器輸入 |
| 5 | EB- | 編碼器輸入 |
| 6 | EZ- | 編碼器輸入 |
| 7 | +5V | 內部電源+5v輸出 |
| 8 | 備用 | 備用 |
| 9 | DIR+ | 伺服或步進方向輸出 |
| 10 | GND | 內部電源地 |
| 11 | PUL- | 伺服或步進脈沖輸出 |
| 12 | 備用 | 備用 |
| 13 | GND | 內部電源地 |
| 14 | OVCC | 外部E+24V輸出(建議僅供伺服IO ) |
| 15 | 備用 | 備用 |
| 16 | 備用 | 備用 |
| 17 | EA+ | 編碼器輸入 |
| 18 | EB+ | 編碼器輸入 |
| 19 | EZ+ | 編碼器輸入 |
| 20 | GND | 內部電源地 |
| 21 | GND | 內部電源地 |
| 22 | DIR- | 伺服或步進方向輸出 |
| 23 | PUL+ | 伺服或步進脈沖輸出 |
| 24 | GND | 內部電源地 |
| 25 | 備用 | 備用 |
| 26 | 備用 | 備用 |
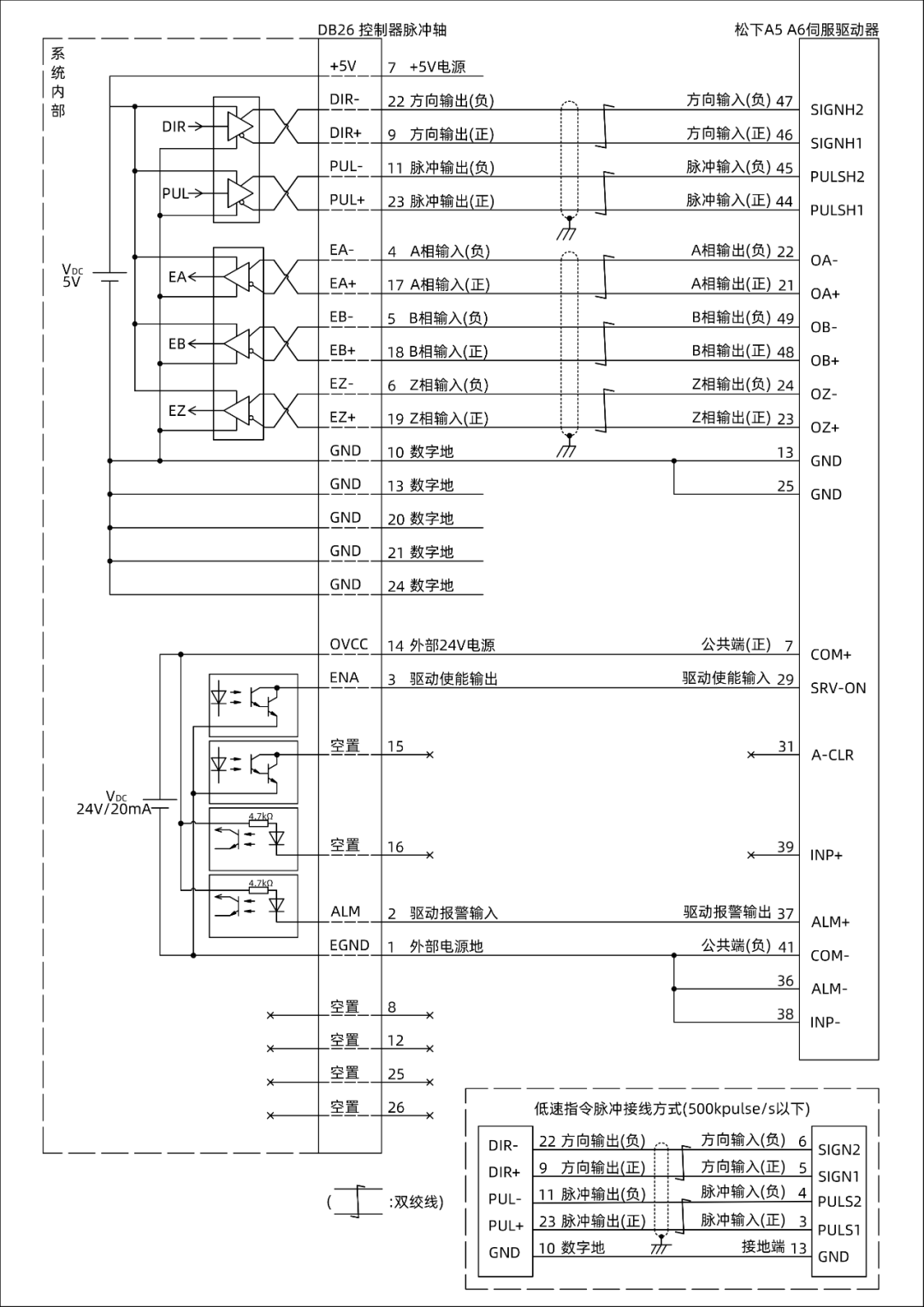
參考下圖完成控制器與驅動器的脈沖控制接線,采用了差分接法,脈沖輸出包含四個端子PUL+、PUL-、DIR+、DIR-,分別與驅動器一一對應連接即可。 帶編碼器反饋的驅動設備,差分接線方式是將EA+、EA-、EB+、EB-、EZ+、EZ-分別連接編碼器。 再將針腳3接入驅動器的使能端子上,用于控制器給驅動器上使能信號。參考上圖。
AXIS 0 軸接口端子內的使能信號為OUT12;
AXIS 1 軸接口端子內的使能信號為OUT13;
依此類推。
使能操作:OP(12,ON),OP(13,ON)等。
驅動器報警信號通過針腳2傳入控制器,參考上圖。
AXIS 0 軸接口端子內的報警信號為IN24;
AXIS 1 軸接口端子內的報警信號為IN25;
依此類推。
驅動器報警輸入信號需要使用ALM_IN指令配置:ALM_IN(0)=24,ALM_IN(1)=25等。
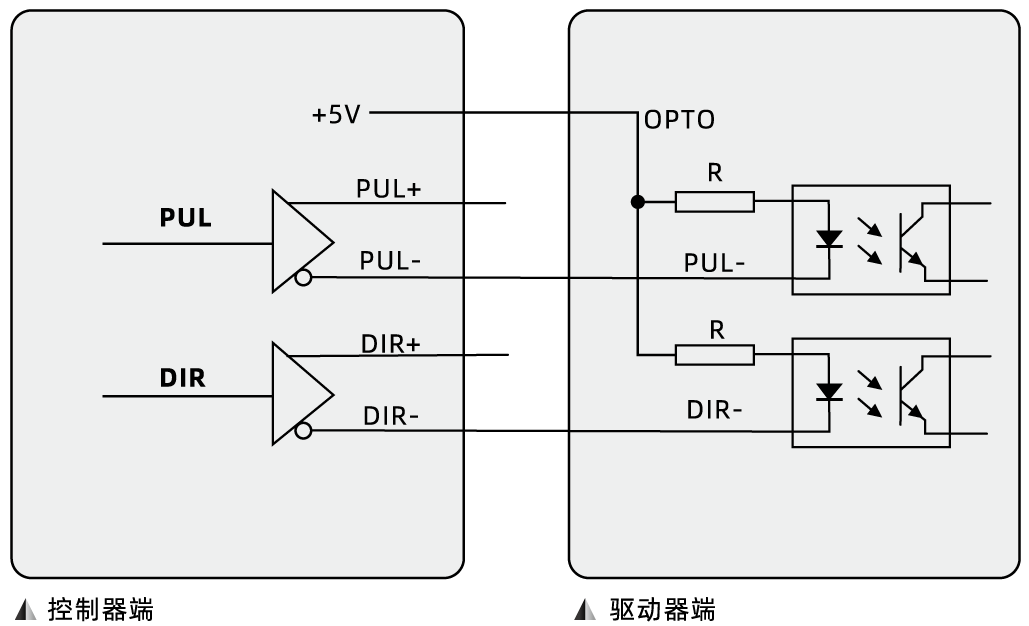
脈沖的單端連接方式如下圖,下圖采用共陽極的接法,將驅動器的公共端接入DB26提供的+5V端子上。
編碼器的單端接線圖如下,編碼器的A,B(無Z信號的型號只接AB兩相)與控制器正端子EA+、EB+一一對應連接,控制器的負端子懸空,編碼器的0V或地線端子,連接控制器軸接口內的GND端子即可,再按編碼器的供電要求接入電源。
2.IO接口
如下圖,ZMC432支持6路脈沖軸控制,IO口分普通IO口和高速IO口,普通IO口的響應頻率為10KHz,高速IO口的響應頻率為500KHz,ZMC432的高速IO口除了響應更快之外,部分還集成了特殊功能,參見下文說明。
(1)輸出口
輸出口內部電路如下圖,輸出口0-1支持PWM脈沖寬度調制輸出,同時還支持高速硬件比較輸出(PSO功能)。
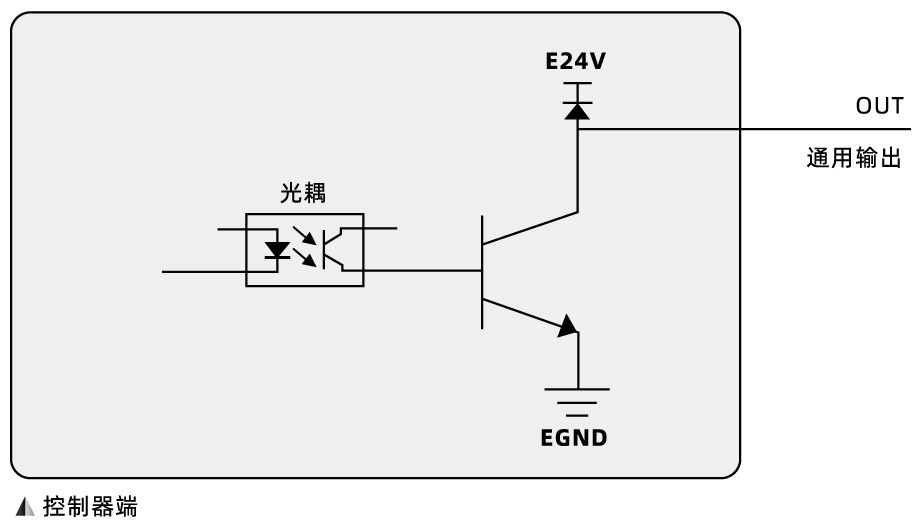
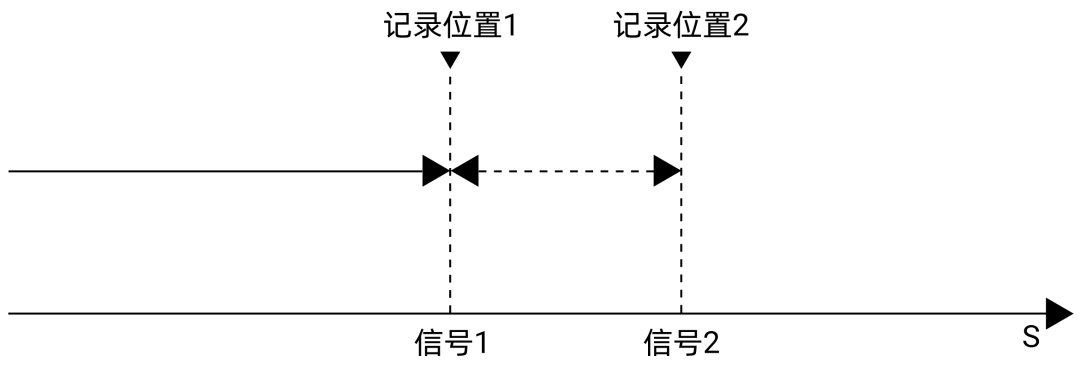
PSO功能:PSO(positionsynchronizedoutput)即位置同步輸出,本質是通過采集實時的編碼器反饋位置(無編碼器可使用輸出的脈沖位置)與比較模式設定的位置進行比較,控制OP高速同步輸出信號,PSO示意圖如下。
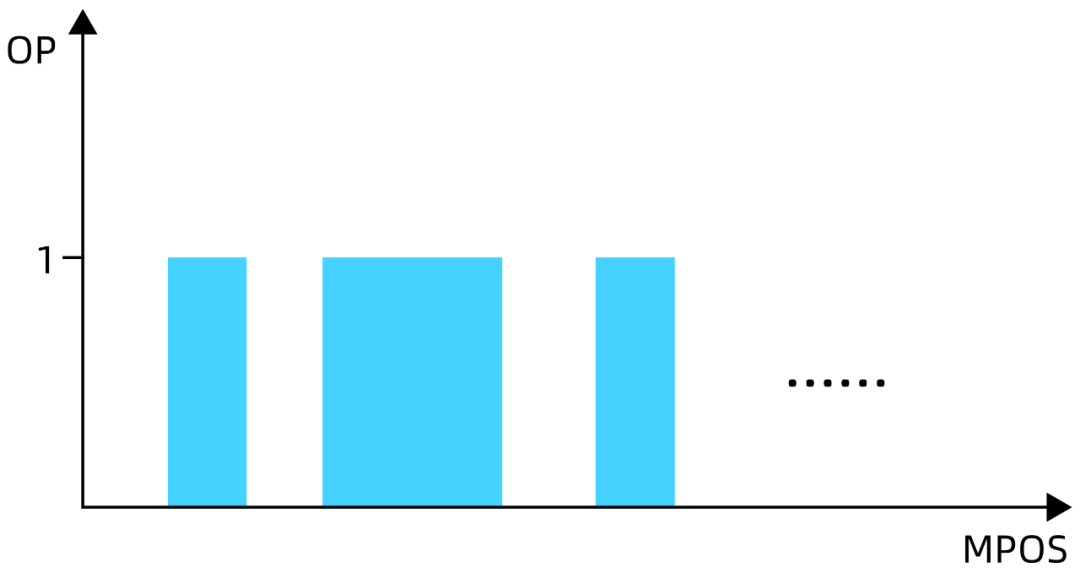
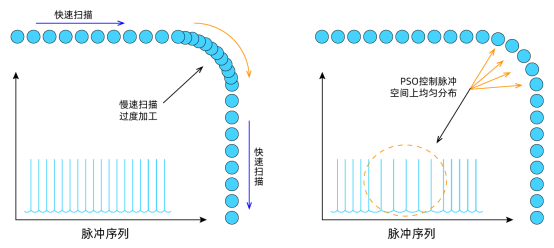
PSO一般與激光器(或點膠噴射閥等設備)同步輸出信號進行相位同步,在運動軌跡的所有階段以恒定的空間(或恒定時間)間隔觸發輸出開關,包括加速、減速和勻速段,從而實現脈沖能量均勻地作用在被加工物體上。
PSO功能的特點就是能高速且穩定的輸出信號,因為輸出精度足夠高,所以能夠在整個運動軌跡中以固定的距離觸發輸出信號而不用考慮總體速度,即在直線部分以很快的速度運動,而在圓角部分減速的同時也能保證輸出間距恒定。
通常圓角加工部分在整個加工過程中占有比較小的部分,這樣在保證加工效果的同時,就可以最大限度地提高產能。
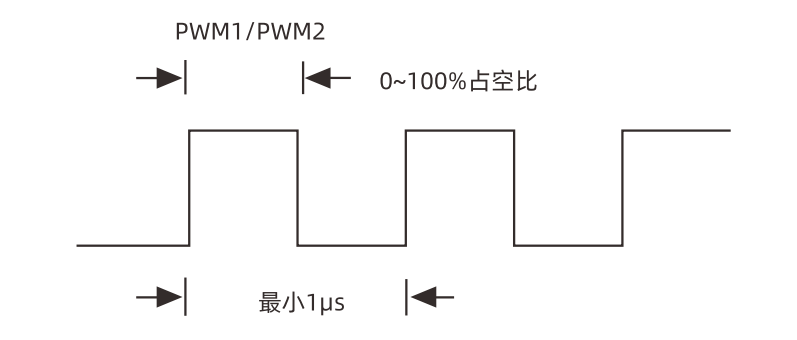
PSO功能由HW_PSWITCH2指令實現,此指令有多種模式,支持等距輸出、固定周期輸出,自定義位置輸出等,精度高,響應快,具體應用方法參見歷史文章。 PWM功能:對支持PWM的OUT開啟PWM功能,需設置PWM的頻率和占空比,用于點膠閥的流速控制、激光器的功率控制等場合。
(2)輸入口
輸入口內部電路如下圖,輸入口IN0-1支持鎖存功能。
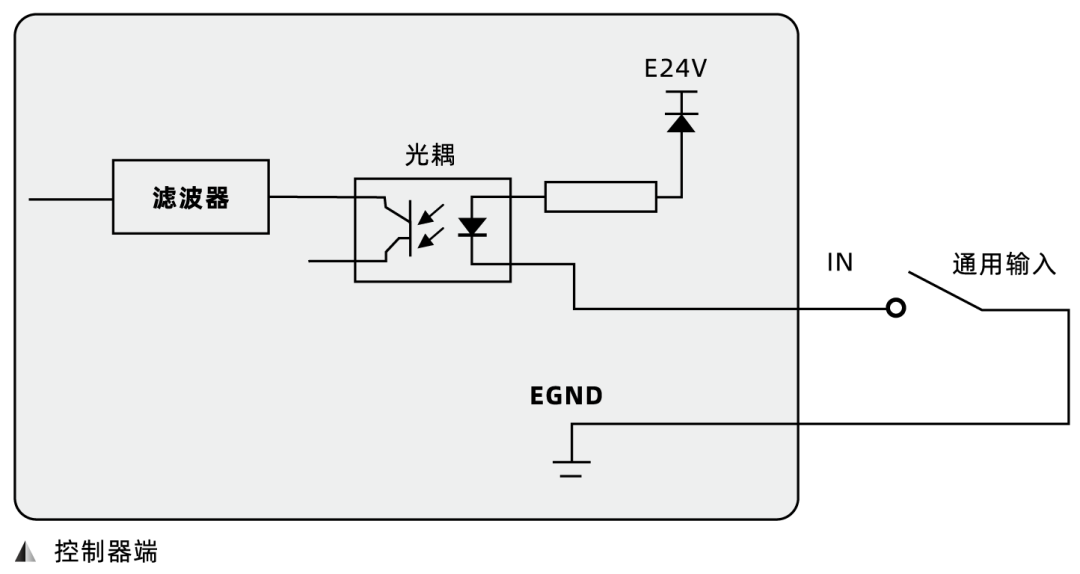
鎖存:通過傳感器輸入信號,輸入口快速響應并鎖存編碼器當前的位置信息,支持單次鎖存和連續鎖存。
二、ZDevelop連接控制器
采用正運動的ZDevelop開發軟件可快速完成設備的試運行,控制器一般使用網口連接到ZDevelop,選擇IP地址連接,默認出廠IP:192.168.0.11,注意控制器需與PC處于同一網段。
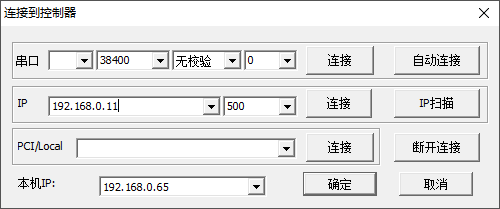
也可以使用串口連接控制器,串口默認參數波特率38400,數據位8,無校驗,掉電后恢復默認參數。
三、配置脈沖軸參數
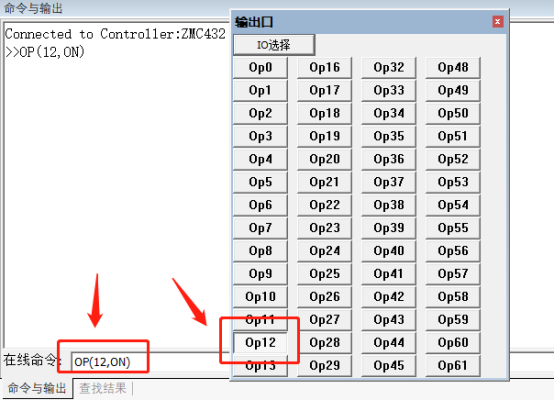
連接控制器之后先使能驅動器,根據硬件手冊描述的軸接口內的使能信號OUT編號,發送OP(ionum,ON)打開使能,例如ZMC432發送OP(12,ON)使能AXIS 0上的驅動器。
在線命令發送或視圖“輸出口”操作OP,上電即使能的步進驅動無需此操作。
以下軸參數可在“視圖”-“手動運動”或“軸參數”窗口快速配置,或新建工程寫入指令語句下載到控制器。 1.BASE
BASE選擇脈沖軸接入的軸號,接在DB頭上軸編號即為面板上標識的AXIS編號。
2.ATYPE ATYPE設置軸的類型,不帶反饋的脈沖軸ATYPE=1/7,帶編碼器反饋的ATYPE=4/5,編碼器單獨接入設置ATYPE=3/6。
| ATYPE類型 | 描述 |
| 0 | 虛擬軸 |
| 1 | 脈沖方向方式的步進或伺服 |
| 2 | 模擬信號控制方式的伺服 |
| 3 | 正交編碼器 |
| 4 | 脈沖方向輸出+正交編碼器輸入 |
| 5 | 脈沖方向輸出+脈沖方向編碼器輸入 |
| 6 | 脈沖方向方式的編碼器 |
| 7 | 脈沖方向方式步進或伺服+EZ信號輸入 |
| 8 | ZCAN擴展脈沖方向方式步進或伺服 |
| 9 | ZCAN擴展正交編碼器 |
| 10 | ZCAN擴展脈沖方向方式的編碼器 |
| 20 |
振鏡類型,帶振鏡狀態反饋 振鏡連接不上AXISSTATUS的bit2會置位,ENCODER返回原始的發送位置,脈沖單位 ZMC408SCAN支持 |
| 21 |
振鏡軸類型,需要控制器支持 缺省系統周期250us,振鏡刷新周期50us,與固件有關 可以使用普通軸的所有運動控制指令,支持振鏡軸與其它軸類型混合插補 |
| 22 |
振鏡軸類型,帶振鏡位置反饋 振鏡連接不上AXISSTATUS的bit2會置位,振鏡報警AXISSTATUS的bit3會置位 MPOS返回反饋位置,做了反矯正處理,ENCODER返回原始的反饋位置脈沖單位 ZMC408SCAN支持 |
| 24 |
遠程編碼器軸類型 ZHD500X上手輪使用,需要控制器5系列20180404以上固件版本支持 |
| 50 | RTEX周期位置模式,需RTEX控制器 |
| 51 | RTEX周期速度模式,需RTEX控制器 |
| 52 |
RTEX周期力矩模式,需RTEX控制器 請先關閉驅動器2自由度控制模式,并設置設置速度限制 |
| 65 | EtherCAT周期位置模式,需支持EtherCAT |
| 66 |
EtherCAT周期速度模式,需支持EtherCAT Profile要設置為20或以上 |
| 67 |
EtherCAT周期力矩模式,需支持EtherCAT PROFILE要設置為30或以上 |
| 70 | EtherCAT自定義操作,只讀取編碼器,需支持EtherCAT |
3.UNITS
UNITS設置脈沖當量,根據驅動器的一圈脈沖數配置,作為控制器的基本單位,可設為電機轉動1°需要的脈沖數,驅動器若10000個脈沖轉一圈,可設置為UNITS=10000/360。
換算關系:若UNITS=10000,直線命令MOVE(5)表示下發50000個脈沖;運行速度SPEED=10,表示每秒下發100000個脈沖。
4.速度
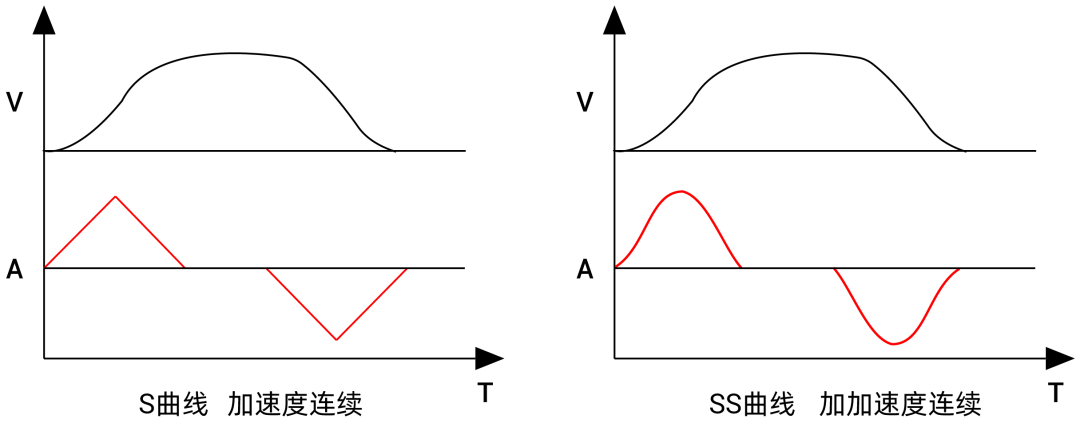
SPEED運行速度、ACCEL加速度、DECEL減速度等基礎速度參數的設置;SRAMP指令設置S曲線,延長加速的時間,速度變化更為平緩,減少抖動,VP_MODE指令設置SS曲線,加速度平穩過渡,使軌跡更柔順,沖擊更小。
5.確認脈沖模式
控制器出廠默認的脈沖模式是脈沖+方向,脈沖模式需要匹配才能運行,需確認驅動器的脈沖模式。
控制器支持三種脈沖模式,脈沖+方向,雙脈沖和正交脈沖(4系列及以上支持)三種,正/負邏輯均可配置。
脈沖模式修改使用INVERT_STEP指令,初始值INVERT_STEP=0,脈沖+方向模式。
語法INVERT_STEP = mode
mode:模式選擇,缺省0,低8位(位0-位7)表示的模式值如下:
| 模式值 | 說明 | 參考示意圖(正邏輯模式) |
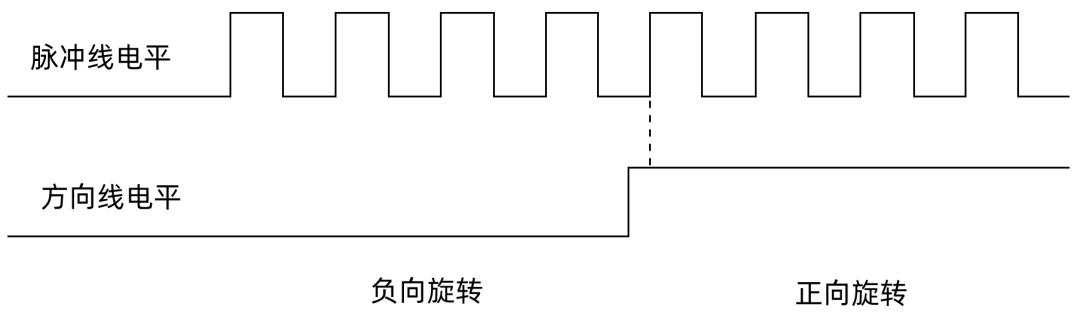
| 0-3 |
脈沖方向模式 脈沖線+方向線 |
 |
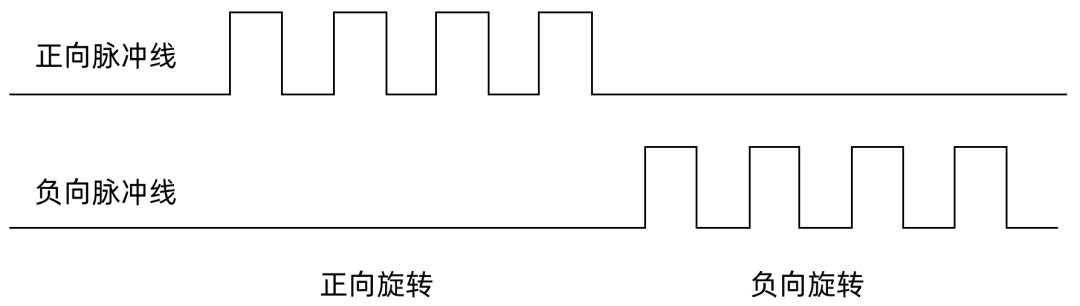
| 4-7 |
雙脈沖方式(或稱CW/CCW) 正向脈沖線+負向脈沖線 |
 |
| 8-9 |
AB輸出,正交脈沖 (部分控制器定制) |
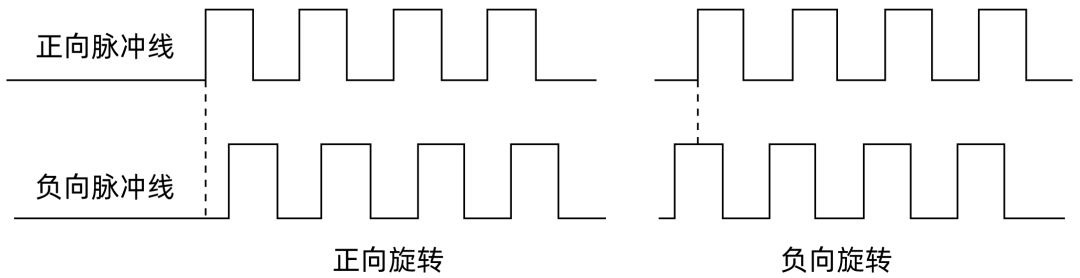 |
各個模式對應的電平如下:若極性對調,參考運動方向與原來相反。
| 模式值 | 描述 | 松下設置參考 | 三菱設置參考 | |
| Pr0.06 | Pr0.07 | PA13 | ||
| 0 | 脈沖/方向(脈沖正邏輯)(正向) | 0 | 3 | ××01h |
| 1 | 脈沖/方向(脈沖負邏輯)(正向) | / | / | ××11h |
| 2 | 脈沖/方向(脈沖正邏輯)(負向) | 1 | 3 | ××01h |
| 3 | 脈沖/方向(脈沖負邏輯)(負向) | / | / | ××11h |
| 4 | 雙脈沖(方向負邏輯)(正向) | / | / | ××10h |
| 5 | 雙脈沖(方向負邏輯)(負向) | / | / | ××10h |
| 6 | 雙脈沖(方向正邏輯)(正向) | 1 | 1 | ××00h(默認) |
| 7 | 雙脈沖(方向正邏輯)(負向) | 0(默認) | 1(默認) | ××00h(默認) |
高8位(位8-位15)表示方向變化保護時間,單位微秒:0-255 設置方法:INVERT_STEP(軸號) = 256*100+6,雙脈沖模式6,保護時間100微秒。
6.運動
采用視圖菜單的手動運動窗口或在線命令發送MOVE直線運動指令調試,通過DPOS目標位置(或MPOS反饋位置)等獲取軸的運動情況,也可采用ZDevelop軟件的視圖窗口“示波器”實時采樣運動波形。 電機運動方向與電機極性設置和INVERT_STEP正/負邏輯設置有關。 7.參數查看
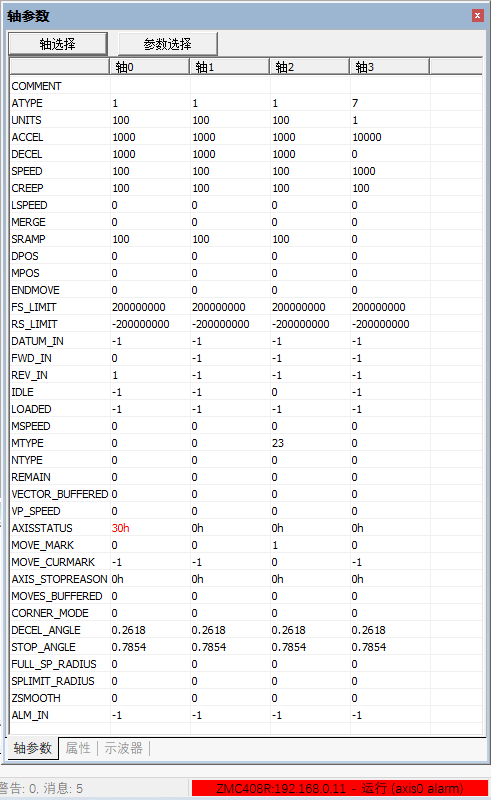
軸參數配置完成可再“軸參數”窗口查看,實時自動刷新和顯示軸參數,支持雙擊直接修改配置參數。

軸選擇:用于選擇要顯示的軸號信息。
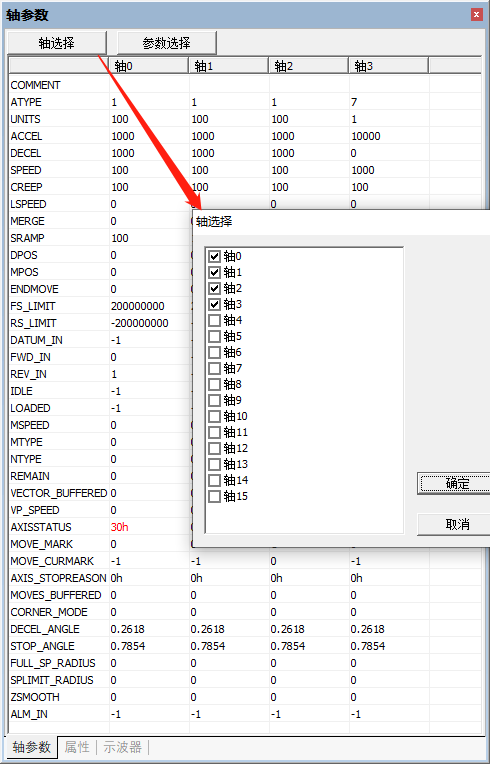
參數選擇:用于自定義顯示關注的軸參數。 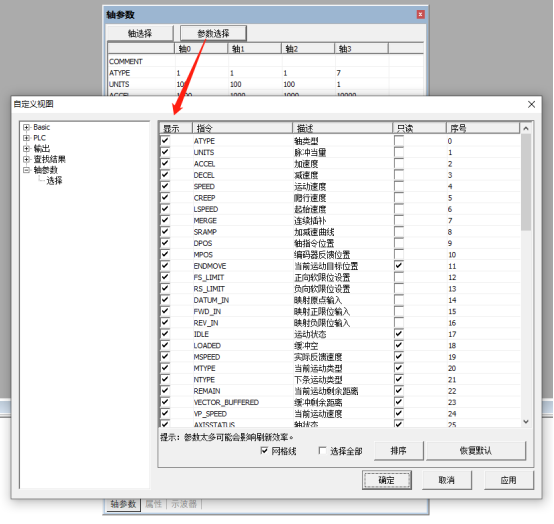
8.異常報警
發生異常報警ZDevelop軟件的“命令與輸出”窗口打印錯誤信息提示,或產生AXISSTATUS報警提示。
AXISSTATUS為軸狀態參數,用于判斷軸當前是否發生異常,按位提示異常信息,可多種異常信息疊加,查詢下表確認,例如AXISSTATUS顯示20h,表示當前碰到負向硬限位,會導致軸立即停止。
AXISSTATUS顯示1000h,表示下發脈沖頻率太快,一般只有在高分辨率的設備會產生此類問題,出現此報警將MAX_SPEED改大即可解決。
| 位 | 說明 | 打印值 | |
| 1 | 隨動誤差超限告警 | 2 | 2h |
| 2 | 與遠程軸通訊出錯 | 4 | 4h |
| 3 | 遠程驅動器報錯 | 8 | 8h |
| 4 | 正向硬限位 | 16 | 10h |
| 5 | 負向硬限位 | 32 | 20h |
| 6 | 找原點中 | 64 | 40h |
| 7 | HOLD速度保持信號輸入 | 128 | 80h |
| 8 | 隨動誤差超限出錯 | 256 | 100h |
| 9 | 超過正向軟限位 | 512 | 200h |
| 10 | 超過負向軟限位 | 1024 | 400h |
| 11 | CANCEL執行中 | 2048 | 800h |
| 12 | 脈沖頻率超過MAX_SPEED限制.需要修改降速或修改MAX_SPEED | 4096 | 1000h |
| 14 | 機械手指令坐標錯誤 | 16384 | 4000h |
| 18 | 電源異常 | 262144 | 40000h |
| 19 | 精準輸出緩沖溢出 | 524288 | 80000h |
| 21 | 運動中觸發特殊運動指令失敗 | 2097152 | 200000h |
| 22 | 告警信號輸入 | 4194304 | 400000h |
| 23 | 軸進入了暫停狀態 | 8388608 | 800000h |
試運行前要確保硬限位開關配置成功,作為機臺的安全保護,防止過沖。
機臺確認可以動作之后,通過DATUM指令配置回零模式,DATUM_IN指令配置原點傳感器映射到輸入口,回零說明參見歷史文章。
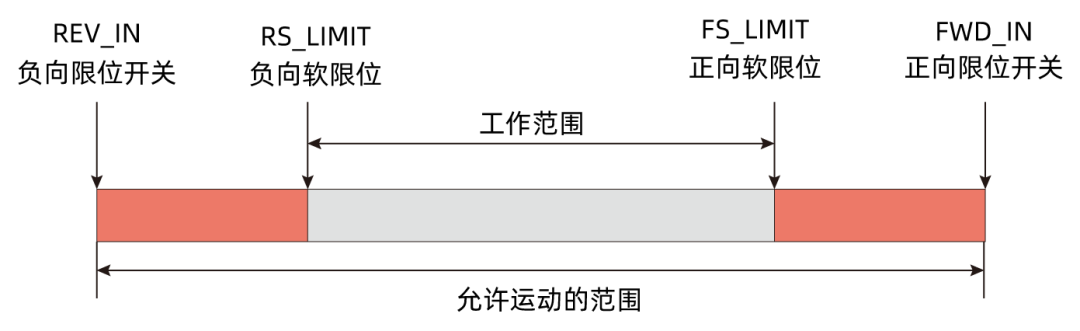
硬限位開關是限制軸的最大“允許行進范圍”的限位開關。硬限位開關是安裝在軸運動行程上的物理開關元件,一般是一個傳感器,硬限位開關由指令映射到相應輸入開關信號上,根據開關信號是常開還是常閉確定是否要對信號進行翻轉,設置完成后,碰到硬限位開關,對應軸立即停止運動,停止減速度為FASTDEC。 軟限位開關將限制軸的“工作范圍”,由指令直接設置限位位置,軸走到設置的DPOS坐標位置后,立即采用減速度FASTDEC停止運動,根據實際需求配置軟限位。
9.配置語法
FWD_IN = 正向硬限位接入的輸入口編號,-1取消映射;
REV_IN = 負向硬限位接入的輸入口編號,-1取消映射;
FS_LIMIT = 正向運動行程限制,取消設置較大值;
RS_LIMIT = 負向運動行程限制,取消設置較大值。
例如,ZDevelop軟件下方狀態欄提示axis0 alarm提示紅色的報警錯誤,檢查軸參數中軸0的AXISSTATUS參數,提示30h,對照AXISSTATUS指令說明,得知發生的是正負限位報警,查看限位配置,即FWD_IN(0)=0,REV_IN(0)=1對應的IN0,IN1的配置,以及其相關的輸入是否INVERT_IN反轉了電平狀態。
四、手動運動快速調試
關閉所有除ZDevelop的軟件,同時使用ZDevelop連接控制器,下載空程序,按前面說明手動設置選擇要調試的軸號、設置軸類型ATYPE、脈沖當量UNITS、加速度ACCEL、減速度DECEL、速度SPEED,然后打開“視圖”-“手動運動”,手動操作電機試運行。
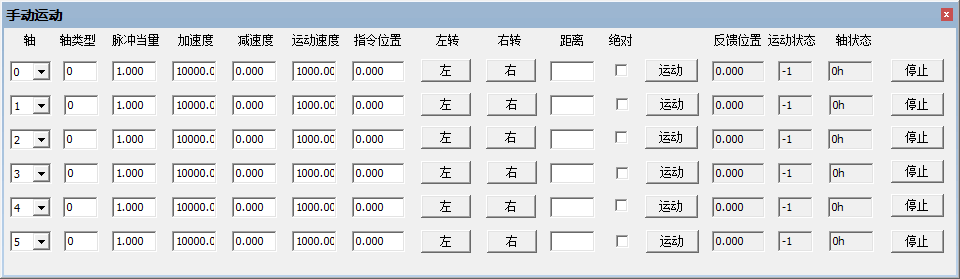
操作方法:按住“左”/“右”不放,電機持續運動,松開停止。“指令位置”顯示當前發出的脈沖DPOS(單位為UNITS)。填寫“距離”參數,點擊“運動”,勾選“絕對”時,電機運動到距離參數位置;不勾選“絕對”時,電機按距離參數繼續運動。
按照以上步驟設置之后,如果電機無法運動,參考下節說明排查。
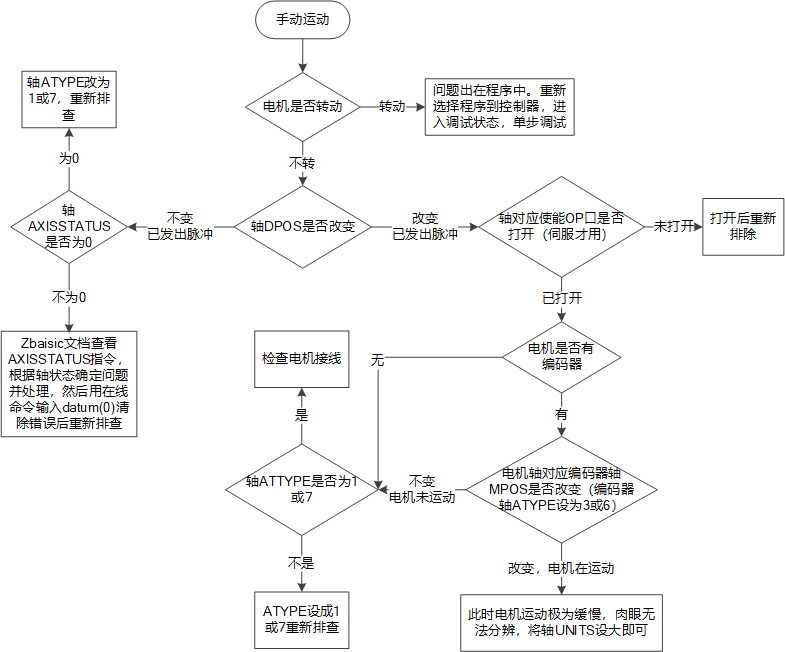
02電機不動作問題排查
一、脈沖軸排查步驟
 ? ?
? ?
二、報錯提示
驅動器有無報警提示,若產生報警,根據報警錯誤碼核對驅動器手冊說明解決后重新運行。
控制器端是否產生報警信息,根據ZDevelop報警打印的錯誤信息、錯誤碼或AXISSTATUS軸狀態提示,解除錯誤后重新運行。
三、參數設置不當
檢查下列參數是否設置合理:
1.電機是否使能成功,電機軸無法用手撥動即為成功使能;
2.下發運動的軸號一定要選擇正確,否則運動命令無法下發給該驅動器;
3.軸的類型根據ATYPE指令的表格填寫正確類型,類型錯誤控制器會報錯,導致無法運動;
4.UNITS的值設置合理,脈沖下發速度太小導致電機動作微弱,肉眼無法分辨是否運動;
5.下發運動指令后,軸參數窗口該軸的DPOS是否改變,未變表示脈沖并未發出,排查AXISSTATUS軸狀態有無提示,當前軸接口是否損壞。
四、動作不正確
1.電機只能單向運動,可能原因有:
(1)電機處于限位狀態,查看AXISSTATUS確認;
(2)電機控制模式不對,INVERT_STEP設置為相應的脈沖模式(雙脈沖或脈沖+方向);
(3)電機接線問題,確認接線。
2.DPOS和MPOS極性相反,或電機轉向與預期相反,解決辦法: 修改電機的極性,通過INVERT_STEP指令或驅動器軟件修改。 接線錯誤時注意事項:
⊙檢查脈沖接線和供電線路是否正確。
⊙檢查各模塊是否正確上電。
⊙檢查單端接線時確認IO是否上電成功。 本次,正運動技術EtherCAT運動控制器中脈沖接口的快速調試與診斷,就分享到這里。
關于正運動技術
正運動技術專注于運動控制技術研究和通用運動控制軟硬件產品的研發,是國家級高新技術企業,主要產品有運動控制器、運動控制卡、視覺運動控制一體機、人機界面以及擴展模塊等。
正運動技術匯集了來自華為、中興等公司的優秀人才,在堅持自主創新的同時,積極聯合各大高校協同運動控制基礎技術的研究,是國內工控領域發展最快的企業之一,也是國內少有、完整掌握運動控制核心技術和實時工控軟件平臺技術的企業。
正運動技術背靠蓬勃發展的制造業,與時俱進,富有創新,致力于智能制造設備商和終端用戶不斷提升技術應用和制造水平。經過眾多合作伙伴多年的應用開發,產品廣泛應用于國內外的3C電子、半導體、印刷包裝、紡織服裝、激光加工、機械加工、機器人、新能源、醫療保健、舞臺娛樂等領域。
審核編輯:湯梓紅
-
驅動器
+關注
關注
52文章
8156瀏覽量
146005 -
接口
+關注
關注
33文章
8497瀏覽量
150834 -
運動控制器
+關注
關注
2文章
393瀏覽量
24653 -
總線
+關注
關注
10文章
2866瀏覽量
87985 -
ethercat
+關注
關注
18文章
653瀏覽量
38604
原文標題:EtherCAT運動控制器中脈沖接口的快速調試與診斷
文章出處:【微信號:伺服與運動控制,微信公眾號:伺服與運動控制】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
EtherCAT運動控制器中脈沖接口的快速調試與診斷
正運動技術運動控制器EtherCAT總線快速入門
經濟型EtherCAT運動控制器:EtherCAT總線快速入門
【正運動】全國產EtherCAT運動控制器 | ZMC432H
EtherCAT總線運動控制的優勢主要體現在哪?
全國產EtherCAT運動控制邊緣控制器-ZMC432H

EtherCAT運動控制邊緣控制器ZMC432H的軸參數配置和單軸運動控制

全國產EtherCAT運動控制邊緣控制器(五):IO配置與回零運動的Python+Qt開發

凌華科技基于軟件控制的EtherCAT運動控制器

EtherCAT運動控制器在LabVIEW中的運動控制與實時數據采集

脈沖全閉環EtherCAT運動控制器的固件升級






 工商網監
工商網監
評論