 3D視覺,如何快速接點「私活」?
3D視覺,如何快速接點「私活」?
在工坊平臺,常常會有企業老板聯系我們,希望工坊能夠快速幫忙對接相應人才,以幫忙解決項目中棘手的難題,比如機械臂抓取、相機標定、缺陷檢測、點云后處理、三維處理、 TOF標定、SLAM方案咨詢等;同時,也有星球成員私下聯系我們,希望工坊能夠幫忙對接一些企業項目,可以在業余時間接點活兒。 這里,我們總結了一些星球成員已有的項目技能,如各位企業主有相關項目需求,可以聯系我們小助理,由小助理幫忙快速精準對接。
項目技能一:3D機械臂抓取
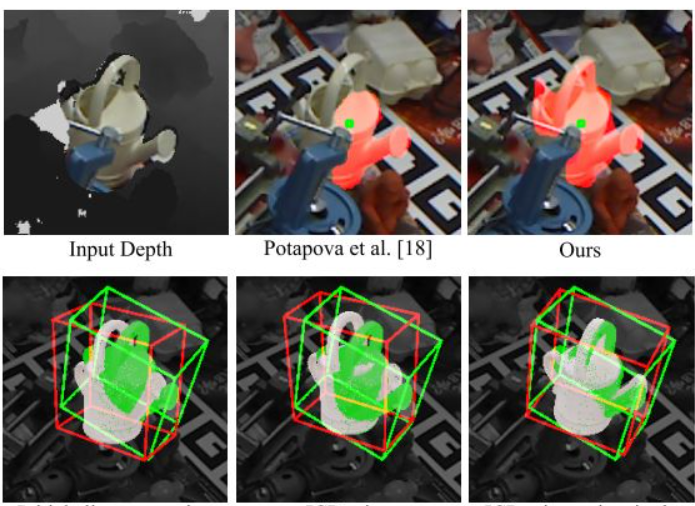
1.深度相機(雙目視覺,ToF,結構光等)下的物體位姿估計(可基于halcon,PCL,open3d等軟件或者庫)
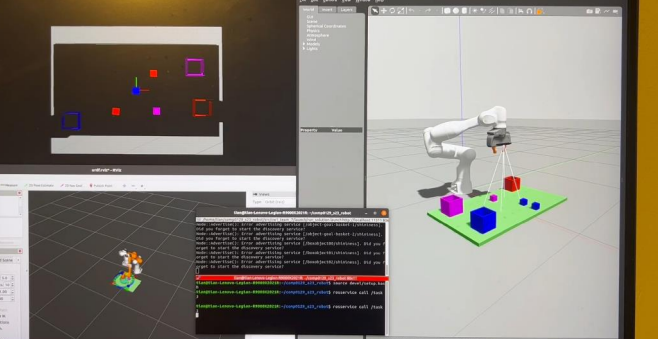
2.機械臂結合深度相機完成抓取,采集,堆疊,拆垛等項目 (可基于 ROS 或者直接 TCP/IP 通信)

3.采用ROS完成機械臂gazebo場景仿真環境搭建
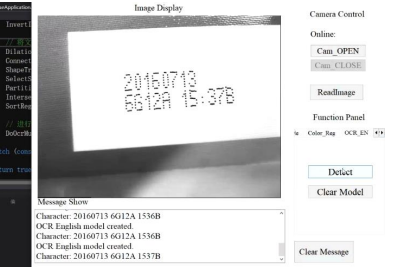
4. 基于Halcon的工件缺陷檢測,OCR識別,一維碼二維碼檢測等。
5.搭建基于點云顯示的Qt界面或者Opengl界面搭建
6. 基于CUDA 進行數據加速計算,量化和 jeston 系列設備進行深度神經網絡部署。
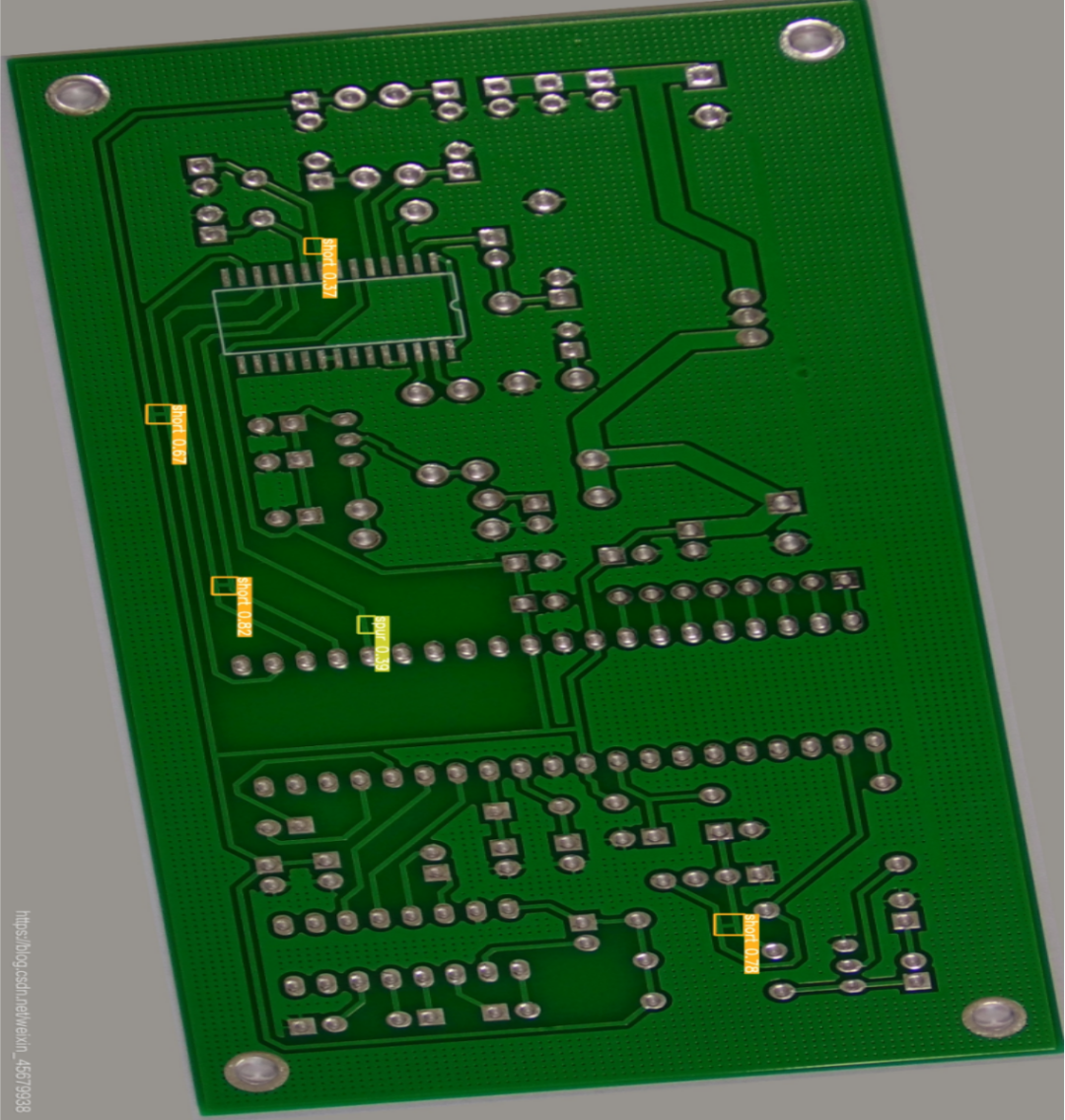
項目技能二:缺陷檢測
2.1 AOI外觀缺陷檢測
(1)可解決小目標缺陷(5個像素以上) (2)推理速度快
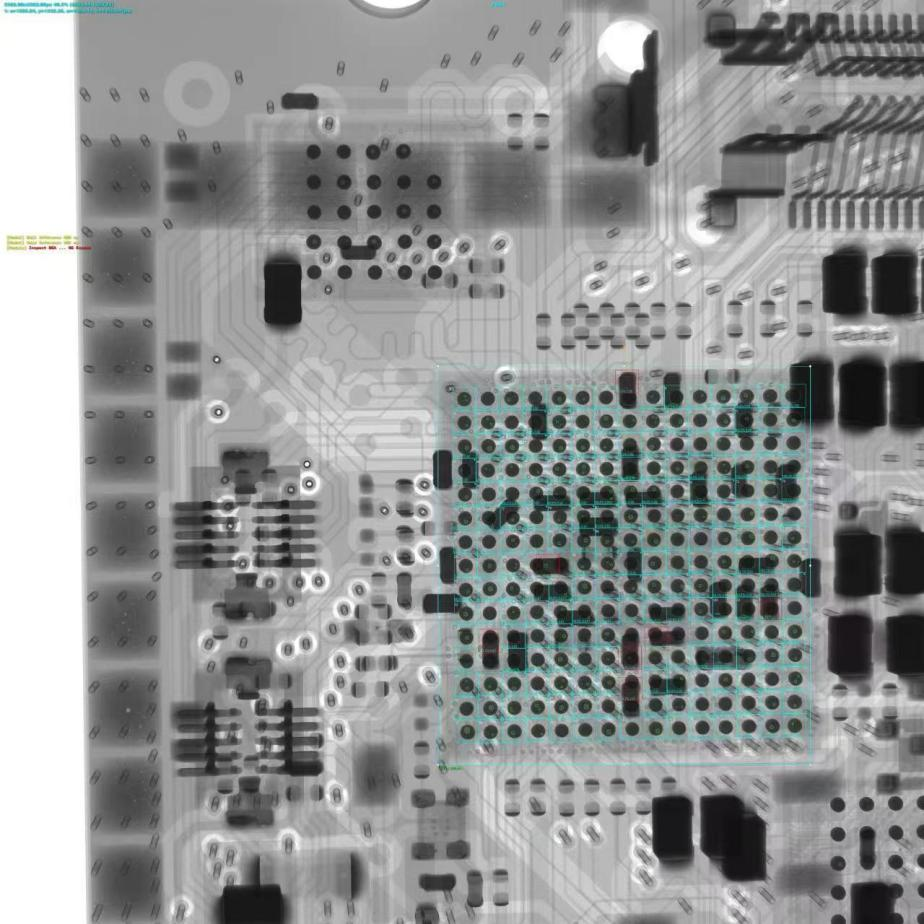
2.2X光內部探傷
(1)缺陷模糊
2.3.自然場景尺寸測量(測量軌道縫隙)
(1)場景復雜多變

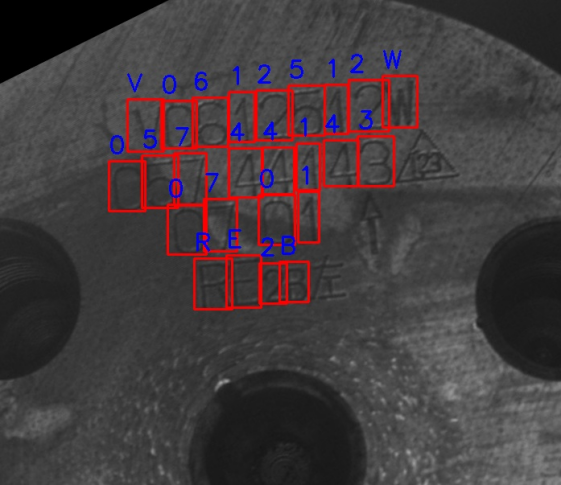
2.4工業負責場景OCR
(1)環境惡劣
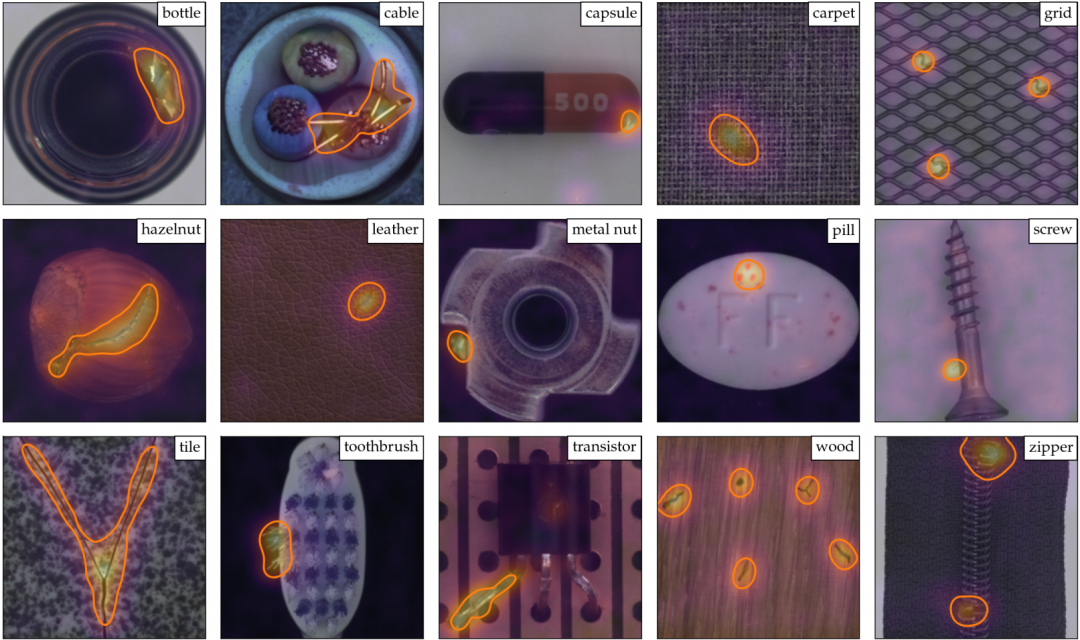
2.5 無監督異常檢測
(1)無需標注訓練缺陷
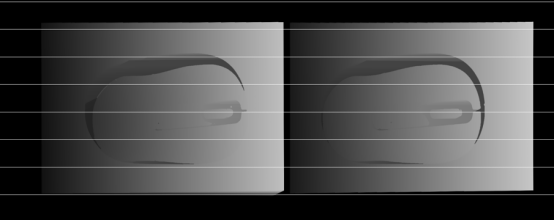
項目技能三:三維點云
3.1 不同量級和方案的點云處理平臺搭建
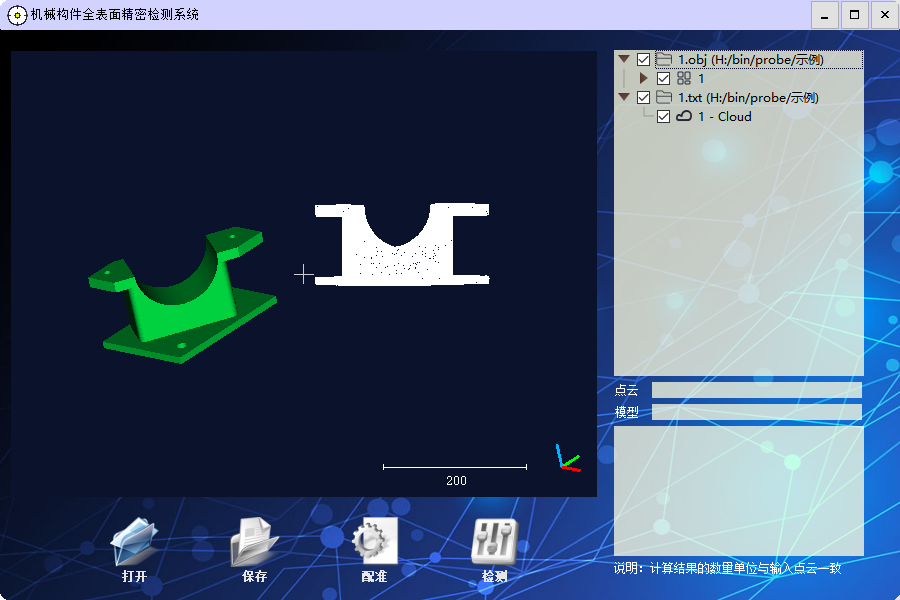
3.2 各種點云算法的實現-傳統的
項目技能四:結構光
1、可實現單目+投影儀(格雷碼)標定。 2、結構光相機硬件設計、搭建
3、單目結構光相機標定+重建
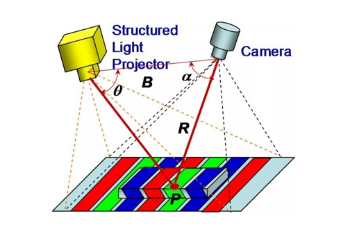
4、雙目結構光相機標定+重建
5、重建誤差校正

6、結構光相關課題的畢業論文指導
項目技能五:相機標定(針孔、魚眼、全景、單/雙/陣列)
可實現高精度相機標定。最后如果你在某一個領域能夠獨擋一面,且已具備豐富的項目實戰經驗,比如:SLAM、自動駕駛、TOF標定、多傳感器標定實戰經驗等,歡迎聯系我們,我們將力所能及為你向企業推薦,以解決企業找人難的困局,以此同時,你也將實現知識變現。 審核編輯 :李倩
-
傳感器
+關注
關注
2548文章
50740瀏覽量
752144 -
機械臂
+關注
關注
12文章
510瀏覽量
24500 -
3D視覺
+關注
關注
4文章
430瀏覽量
27493
原文標題:3D視覺,如何快速接點「私活」?
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
采用DLP技術的3D機器視覺參考設計包括BOM
嵌入式3D視覺功能相關資料推薦

探討關于3D視覺技術和3D傳感器
一文帶你看懂3D視覺
3D視覺主要技術路徑 3D結構光技術原理
關于3D機器視覺的幾個技術趨勢
智造之眼?深入3D視覺應用

3D視覺的三大優勢





 工商網監
工商網監
評論