") 相位噪聲與時(shí)間抖動(dòng)有著什么關(guān)系?
相位噪聲與時(shí)間抖動(dòng)有著什么關(guān)系?
相位噪聲與時(shí)間抖動(dòng)貌似毫不相干,但卻是形影不離的,都是描述信號(hào)頻率穩(wěn)定性的參數(shù),只是切入的角度不同。時(shí)間抖動(dòng)的類型有很多,哪一種抖動(dòng)是與相位噪聲相對(duì)應(yīng)的,彼此之間又有什么樣的關(guān)系,下面將為您揭曉答案。
什么是相位噪聲?什么是時(shí)間抖動(dòng)?
您是否深究過(guò)相位噪聲的定義?實(shí)際上,IEEE先后給過(guò)兩種相位噪聲的定義,最早的定義也是大家最熟知:距離載波一定頻偏處,噪聲功率譜密度與載波功率的比值即為相位噪聲。
這種方法測(cè)試的相位噪聲并不是純相位噪聲,同時(shí)還包含了調(diào)幅噪聲(AM噪聲)。為了準(zhǔn)確表征相位噪聲,IEEE后來(lái)又給了一版比較拗口的定義,這不是本文的重點(diǎn),不再展開描述。 至于時(shí)間抖動(dòng),更多情況下是高速串行通信中會(huì)關(guān)注這個(gè)參數(shù),主要是指信號(hào)邊沿的波動(dòng)情況。SONET(Synchronous Optical Network)規(guī)范中給出的時(shí)間抖動(dòng)定義是:數(shù)字信號(hào)的邊沿在時(shí)間上相對(duì)于理想位置的短期波動(dòng)偏移量。從高速串行信號(hào)的角度講,這個(gè)定義更多是指TIE(Time Interval Error)。
根據(jù)具體的成因,TIE又可以分為多種類型的抖動(dòng)分量:隨機(jī)抖動(dòng)(RJ)、周期性抖動(dòng)(PJ)、碼型相干抖動(dòng)(DDJ或ISI jitter)、占空比失真(DCD)等。其中,隨機(jī)抖動(dòng)是因隨機(jī)噪聲導(dǎo)致的信號(hào)邊沿的波動(dòng),是與相位噪聲相對(duì)應(yīng)的抖動(dòng)。因此,下面將著重介紹隨機(jī)抖動(dòng)與相位噪聲的關(guān)系。
值得一提的是,相位噪聲通常是針對(duì)于正弦波信號(hào)而言的,同時(shí)正弦波信號(hào)又是一種特殊的串行信號(hào),因此,下面的內(nèi)容都是以正弦波信號(hào)為例進(jìn)行介紹。
相位噪聲與時(shí)間抖動(dòng)有著什么關(guān)系?
理想的正弦波信號(hào)用公式可以表示為

想象一下,理想正弦波信號(hào)的頻譜就是非常純凈的單根譜線,沒(méi)有任何邊帶。
而實(shí)際并不存在理想的正弦波信號(hào),從頻譜上看,實(shí)際的正弦波信號(hào)頻譜都是具有左右對(duì)稱的兩個(gè)邊帶,為什么會(huì)這樣呢?
這正是相位噪聲和調(diào)幅噪聲的緣故,相位噪聲可以理解為寬帶噪聲對(duì)載波信號(hào)的相位調(diào)制,調(diào)幅噪聲可以理解為寬帶噪聲對(duì)載波的幅度調(diào)制。回憶一下大學(xué)時(shí)期學(xué)習(xí)模擬調(diào)制的課程,AM/FM/ PM調(diào)制的頻譜都是關(guān)于載波對(duì)稱的。因此,正弦波信號(hào)的頻譜具有對(duì)稱的左右兩個(gè)邊帶。
從相位調(diào)制的角度看,經(jīng)寬帶隨機(jī)噪聲u(t) 調(diào)制后,已調(diào)信號(hào)可以表示為

式中,kPM為調(diào)相比例系數(shù),u(t) 為寬帶隨機(jī)信號(hào),通常可以視為白噪聲信號(hào),相當(dāng)于由無(wú)數(shù)個(gè)點(diǎn)頻信號(hào)疊加而成。

對(duì)于u(t) 中包含的任意頻點(diǎn)?m,對(duì)應(yīng)的調(diào)制信號(hào)表達(dá)式為

下面以頻率為?m的信號(hào)作為調(diào)制信號(hào),從數(shù)學(xué)的角度推導(dǎo)單邊帶相位噪聲與時(shí)間抖動(dòng)的關(guān)系。 對(duì)射頻載波調(diào)相后,已調(diào)信號(hào)的表達(dá)式為

由調(diào)制信號(hào)引起的載波信號(hào)的瞬時(shí)相位定義為

通常稱θp為調(diào)相因子,表征了載波信號(hào)相位波動(dòng)的最大偏移,單位為弧度rad.,其表達(dá)式為

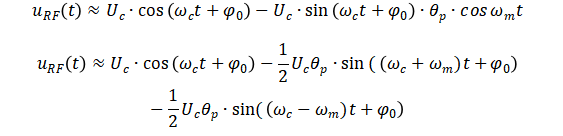
因此,已調(diào)信號(hào)又可以寫為

將上式展開為

因?qū)拵г肼暦确浅P。瑢?duì)載波信號(hào)進(jìn)行相位調(diào)制造成的相位偏移也是非常小的,通常θp<<1,則存在如下近似關(guān)系: sin(θp·cos ?mt) ≈ θp·cos ?mt,cos(θp·cos ?mt) ≈ √1-(?θp·cos ?mt)2→1 上式可進(jìn)一步寫為
理論上,如果使用單頻點(diǎn)信號(hào)作為調(diào)制信號(hào)對(duì)射頻載波進(jìn)行相位調(diào)制,已調(diào)信號(hào)可以展開為第一類貝塞爾函數(shù),從展開式可以看出,頻譜分量非常豐富,而且關(guān)于載波頻率左右對(duì)稱。而上面的公式表明,卻只有載波、左右邊帶三個(gè)頻率分量,這正是因?yàn)樯厦孀隽艘恍?shù)學(xué)近似。
以右邊帶為例,其信號(hào)功率為

載波信號(hào)功率為

則在頻偏 fm=?m/2π 處的單邊帶相位噪聲為

式中,θrms為載波信號(hào)相位波動(dòng)的有效值。該公式具有普遍適用性,適用于任意頻偏。
相位噪聲表征了某一頻偏處的單邊帶相對(duì)噪聲功率譜密度,由上式可知,θ2rms表征了雙邊帶相對(duì)噪聲功率譜密度。
上面是以寬帶隨機(jī)噪聲中的任意單頻點(diǎn)信號(hào)作為調(diào)制信號(hào)為例,簡(jiǎn)要描述了相位噪聲的形成,而寬帶噪聲包含無(wú)數(shù)個(gè)單頻點(diǎn)信號(hào),對(duì)載波進(jìn)行相位調(diào)制后,那么從頻譜上看,同樣可以得到左右對(duì)稱的兩個(gè)邊帶,而且左右邊帶的頻譜是連續(xù)的。
隨機(jī)抖動(dòng)與相位噪聲有什么關(guān)系呢?
時(shí)間抖動(dòng)就是指載波信號(hào)上升沿或者下降沿在時(shí)間軸上的短期波動(dòng),隨機(jī)抖動(dòng)是由于寬帶噪聲引起的邊沿?zé)o規(guī)則隨機(jī)波動(dòng),這與相位噪聲是一一對(duì)應(yīng)的,邊沿的波動(dòng)是各個(gè)頻偏處相噪的綜合體現(xiàn)。載波邊沿的隨機(jī)波動(dòng),存在一個(gè)波動(dòng)范圍,從概率密度上講,基本服從高斯分布,通常采用標(biāo)準(zhǔn)差表征隨機(jī)抖動(dòng),這也是隨機(jī)抖動(dòng)的有效值,也是通常要測(cè)試的參數(shù)。
時(shí)間抖動(dòng)引起了相位的波動(dòng),只要確定了相位波動(dòng)的量,那么也就確定了時(shí)間抖動(dòng)。
將各個(gè)頻偏處的相位噪聲求和并進(jìn)一步變換可得
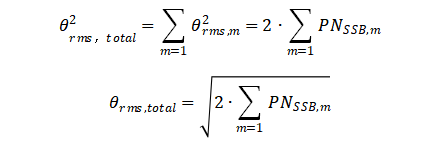
由于相位噪聲的邊帶是連續(xù)的,因此,上式可以用積分表示

當(dāng)然,測(cè)試設(shè)備是沒(méi)有辦法進(jìn)行積分的,只能對(duì)離散的測(cè)試數(shù)據(jù)進(jìn)行求和來(lái)模擬積分的效果。
θrms,total即為由總體的相位噪聲引起的相位波動(dòng),結(jié)合載波頻率并運(yùn)用如下公式便可以計(jì)算出對(duì)應(yīng)的時(shí)間抖動(dòng)

值得一提的是,上述公式中的相位噪聲不是對(duì)數(shù)值,而是線性值!而且,根據(jù)相位噪聲計(jì)算得到的抖動(dòng)為隨機(jī)抖動(dòng),換言之,隨機(jī)抖動(dòng)與相位噪聲是一一對(duì)應(yīng)的。
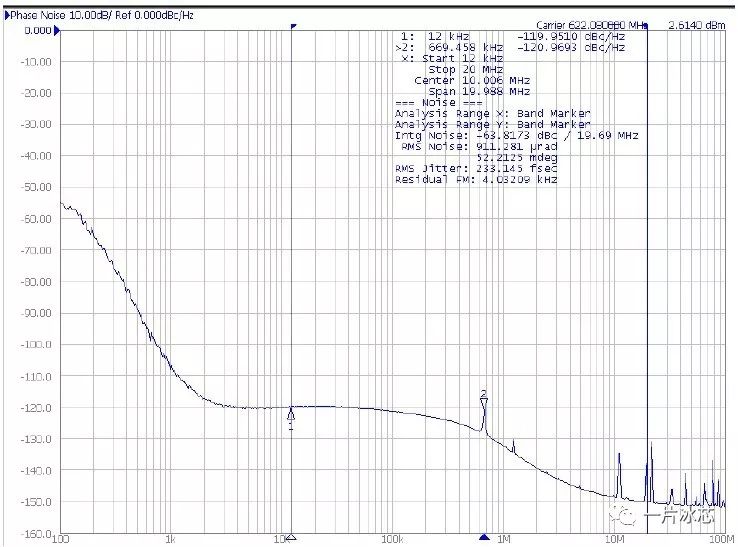
如果根據(jù)頻譜儀或者相噪測(cè)試儀測(cè)得的相位噪聲結(jié)果手動(dòng)計(jì)算隨機(jī)抖動(dòng),則需要注意:
由于儀表并不能測(cè)出所有頻偏處的相位噪聲,而是給出若干個(gè)均勻的離散頻偏處的相噪,因此計(jì)算抖動(dòng)的思路為:(1) 確定測(cè)試頻偏離散點(diǎn)之間的頻間距,可以從儀表導(dǎo)出的數(shù)據(jù)中明確;(2) 在頻間距范圍內(nèi),認(rèn)為相噪是一個(gè)常數(shù)。故實(shí)際運(yùn)算時(shí)的公式如下:

式中,?f為頻間距,單位為Hz。
如何測(cè)試時(shí)間抖動(dòng)?
從目前看,關(guān)注時(shí)間抖動(dòng)的信號(hào)主要分為兩類:快沿信號(hào)和CW信號(hào)。前者通常是指在高速串行總線通信中的比特流信號(hào)及其時(shí)鐘信號(hào),這類信號(hào)普遍具有非常快的邊沿,頻譜分量較為豐富。后者主要是指諸如射頻載波、晶振信號(hào)等單頻點(diǎn)信號(hào),這類信號(hào)頻譜相對(duì)單一。
使用示波器是測(cè)試時(shí)間抖動(dòng)最直接的方法,可以直接測(cè)試抖動(dòng),而不需要由相位噪聲推導(dǎo)而來(lái),對(duì)于上述兩類信號(hào)都是適用的。尤其是對(duì)于快沿信號(hào),不僅要測(cè)試各種抖動(dòng)分量,還要測(cè)試幅度、邊沿時(shí)間以及眼圖等信號(hào)特征參數(shù),必須要使用示波器進(jìn)行測(cè)試。
對(duì)于CW信號(hào),基本上只關(guān)注隨機(jī)抖動(dòng),如果給出了抖動(dòng)的指標(biāo)要求,一定會(huì)給出對(duì)應(yīng)的是哪個(gè)頻偏范圍。中高端示波器可以直接測(cè)試隨機(jī)抖動(dòng),而且支持設(shè)定積分頻偏范圍,觀測(cè)該頻偏范圍內(nèi)的總隨機(jī)抖動(dòng)。但缺點(diǎn)是,示波器自身的抖動(dòng)噪底往往較大,如果CW信號(hào)自身的隨機(jī)抖動(dòng)與示波器抖動(dòng)噪底相當(dāng),那么就無(wú)法直接準(zhǔn)確測(cè)試了。
如前所述,由相位噪聲可以推導(dǎo)出隨機(jī)抖動(dòng),那么就可以先測(cè)試相位噪聲,然后再根據(jù)公式計(jì)算出隨機(jī)抖動(dòng)。通過(guò)配置自動(dòng)相噪測(cè)試選件,中高端頻譜儀測(cè)試相噪和抖動(dòng)更加方便。而且單純從隨機(jī)抖動(dòng)的測(cè)試能力而言,頻譜儀自身的抖動(dòng)噪底也好很多,如果超出了頻譜儀的測(cè)試能力,還可以選擇測(cè)試相噪的“專家級(jí)”設(shè)備——相噪測(cè)試儀,相噪測(cè)試能力更強(qiáng)。優(yōu)點(diǎn)很明顯,但缺點(diǎn)也很明顯,這些頻域設(shè)備只能測(cè)試頻域相關(guān)參數(shù),卻無(wú)法進(jìn)行時(shí)域相關(guān)測(cè)試!
無(wú)論是使用示波器直接測(cè)試隨機(jī)抖動(dòng),還是使用頻譜儀等設(shè)備先測(cè)試相噪、再計(jì)算隨機(jī)抖動(dòng),整個(gè)測(cè)試都是非常簡(jiǎn)單、智能的。那么,應(yīng)該如何選擇呢?關(guān)鍵還是取決于儀表自身的測(cè)試能力和功能是否滿足需求!
審核編輯:劉清
-
示波器
+關(guān)注
關(guān)注
113文章
6203瀏覽量
184547 -
正弦波
+關(guān)注
關(guān)注
11文章
639瀏覽量
55290 -
相位噪聲
+關(guān)注
關(guān)注
2文章
180瀏覽量
22836 -
DCD
+關(guān)注
關(guān)注
0文章
8瀏覽量
2398
原文標(biāo)題:相位噪聲與時(shí)間抖動(dòng)的那些事
文章出處:【微信號(hào):CloudBrain-TT,微信公眾號(hào):云腦智庫(kù)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
相位噪聲到抖動(dòng)的轉(zhuǎn)換(下)
低相位噪聲&抖動(dòng)
時(shí)鐘抖動(dòng)(CLK)和相位噪聲之間的轉(zhuǎn)換

振蕩器相位噪聲到時(shí)間抖動(dòng)的轉(zhuǎn)換
相位噪聲是與哪種類型的抖動(dòng)相對(duì)應(yīng),彼此之間又有著怎樣的數(shù)學(xué)關(guān)系
介紹相位噪聲測(cè)試方案
MT-008: 將振蕩器相位噪聲轉(zhuǎn)換為時(shí)間抖動(dòng)

相位噪聲與時(shí)間抖動(dòng)概述及其關(guān)系
時(shí)鐘抖動(dòng)使隨機(jī)抖動(dòng)和相位噪聲不再神秘
相噪是與哪種類型的抖動(dòng)相對(duì)應(yīng)?如何理解相位噪聲與時(shí)間抖動(dòng)的關(guān)系?
如何理解相位噪聲與時(shí)間抖動(dòng)的關(guān)系?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論