 淺析KUKA機器人系統變量和系統文件
淺析KUKA機器人系統變量和系統文件
處理復雜的機器人應用的一個重要的前提條件是一個自由的和容易使用的可編程控制器。
為了滿足該需求,機器人控制器的功能性必須在機器人語言中可編程。機器人控制器全部的功能僅當控制參數完整地和集成在機器人程序中時才可使用。通過預定系統變量和文件,在KRC...中得到了最好的解決。
預定變量的例子是$POS_ACT(當前機器人位置),$BASE(基本坐標系)或$VEL.CP(CP速度)。更詳細的說明和。
所有預定變量的列表見單獨資料[系統變量]。
系統變量被完整地集成在KRL的變量概念中。系統變量擁有相對應的數據類型,可以象其它變量一樣可在程序中讀和寫,沒有數據的類型的限制。當前機器人的位置,例如,僅可以讀而不能寫。控制器檢查和限制該狀態。
基于安全觀念的允許,您有可能會寫系統數據。從KCP或編程系統中可以裝載和改變大量的系統數據,這樣就建立一個寬范圍的診斷能力 寫系統變量的例子是$TIMER[ ]和$FLAG[ ]。
16個計時器變量$TIMER[1]…$TIMER[16]可用于測量時間順序,可用作“秒表”。開
始和停止計時使用系統變量$TIMER_STOP[1]…$TIMER_STOP[16]:
$TIMER_STOP[4]=FALSE
開始計時器4,舉例。
$TIMER_STOP[4]=TRUE
開始計時器4。使用一般變量分配可在任何時候復位有關的計時器變量。舉例來說:
$TIMER[4]=0
如果計時器變量值從負向正變化,對應的標記則設置為TRUE(暫停條件),舉例來說:
$TIMER_FLAG[4]=TRUE
當控制器啟動時,所有的計時器變量預設置為0,標記
$TIMER_FLAG[1]…$TIMER_FLAG[16] 預設置為FALSE,變量$TIMER_STOP[1]...$TIMER_STOP[16] 預設置為TRUE。
計時器變量的單位是毫秒(ms)。$TIMER[1]…$TIMER[16]和$TIMER_FLAG[1]...$TIMER_FLAG[16]以12ms循環更新。
1024個標記$FLAG[1]…$FLAG[1024]被用作全局標記。這些BU布爾變量預設置為FALSE。
您可以隨時在用戶界面上通過“監視”菜單看標記的當前值。
KRC...中可用32個循環標記$CYCFLAG[1]…$CYCFLAG[32],控制器啟動后預設為FALSE。
機器人中標記僅是循環被激活。在提交文件中允許循環標記,但是它們不循環求值。
循環標記可在子程序、函數和中斷子程序中定義和激活。
$CYCFLAG[1]…$CYCFLAG[32]的數據類型為BOOL型。任何布爾表達式可分配給循環標記。
下列是允許的:
G布爾系統變量
G在數據表中聲明和初始化過的布爾變量。
不允許的是
G函數返回的布爾值
語句
$CYCFLAG[10]=$IN[2] AND $IN[13]
布爾表達式“$IN[2]AND$IN[13]”循環求值。例如,一旦輸入12或輸入13變化,$CYCFLAG[10]也變化,上述表達式執行后與程序指針的位置無關。
定義過的所有的循環標記保持有效直到選擇一個模態或通過復位進行程序塊選擇。所有的循環標記保持有效直到程序的最后。
$符號
預定變量一般選擇一個容易記憶的名稱。以$符號開始和有意義的英文縮寫組成。它們象一般變量一樣處理,所以您不必記憶任何不尋常的命令和稀有的選項。
為避免發生混亂,您在聲明自己的變量的時候應該以$符號開頭。
有的預定變量針對整個KRC...控制器(例如$ALARM_STOP用于定義輸出到到PLC的急停信號PLC).其它,然而僅用于機器人(例如$BASE用于基本坐標系)。
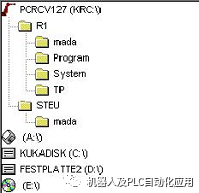
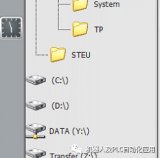
機器人驅動器中有關控制的數據存儲在目錄“Steu”中,有關機器人的數據存儲在目錄“R1”中,并可在KUKA GUI上顯示。
KUKA圖形用戶界面上的不同級別
當編程KRC...,您可以建立程序文件和數據表。程序文件是數據定義和可執行指令。而數據表僅包含數據定義和可能的初始化。
除了編程期間建立的數據表外,在KRC...中還有KUKA定義的和控制軟件一起的數據表。這些數據表被稱為預定數據表,主要包含預定變量。
您自己并不刪除和建立預定數據表,當軟件安裝時自動產生,然后永遠可以使用。就象預定數據的名稱一樣,預定數據表的名稱也以$符號開始。
KRC...中存在以下預定數據表:
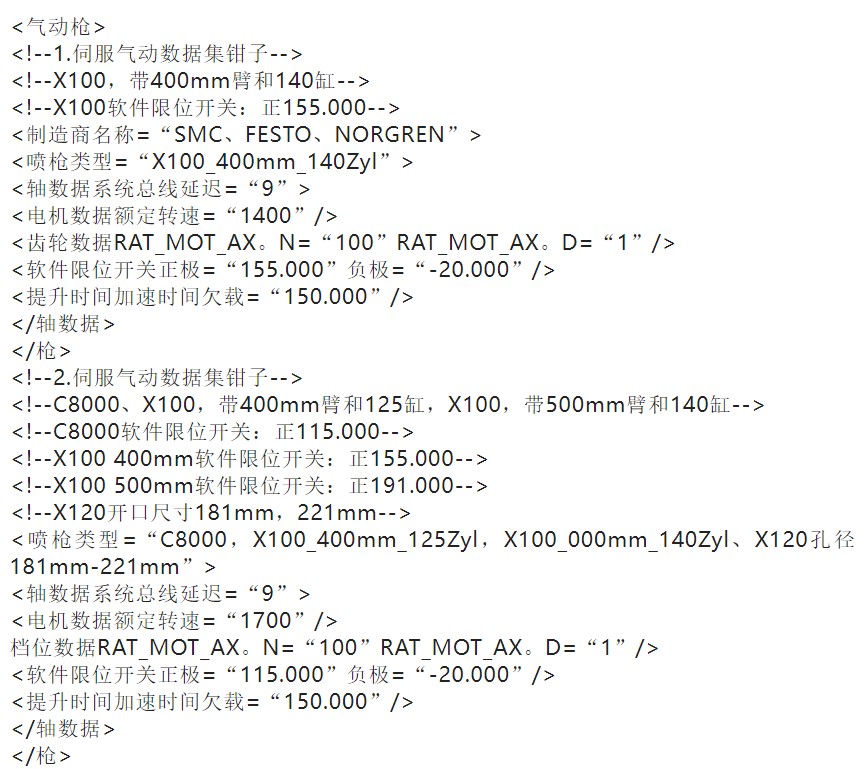
● $MACHINE.DAT
是預定數據表,包含專有的系統變量。適配控制器和所連接機器人(運動信息,控制參數等)的機床數據。控制系統和機器人系統中都有一個$MACHINE.DAT,您不可以新建或刪除現存的。
例如:
$ALARM_STOP 急停信號 (控制器特有)
$NUM_AX 機器人軸數 (機器人特有)
● $CUSTOM.DAT
僅在控制系統中存在的數據表。包含可以配置或參數化特定控制函數的數據。編程師僅可以改變預定變量的值。不可以新建或刪除現存的。
例如:
$PSER_1 串行接口1的協議參數
$IBUS_ON 激活可選的聯絡母線組
● $CONFIG.DAT
KUKA預定的數據表,不包含任何系統變量,然而,在控制級和機器人級都有一個
$CONFIG.DAT 可用。其中可定義長時間有效的變量、結構、通道和信號,對許多程序普通重要。
數據表分為以下幾個程序塊:
-- BAS
-- AUTOEXT
-- GRIPPER
-- PERCEPT
-- SPOT
A10
A50
A20
-- TOUCHSENSE
-- USER
用戶的全局聲明應該輸入USER程序塊,因為僅該處的聲明在以后的軟件升級中被轉移。
● $ROBCOR.DAT
文件$ROBCOR.DAT包含特定機器人的機器人動態模型的數據。在軌跡計劃編排中需要這些數據。在文件中您不可以新建一個新變量或刪除現存的。
| 數據表 | 系統 | 值分配 | ||
| 數據表 | 控制 | 機器人 | at | by |
| $MACHINE.DAT | Y | Y | 試運轉 | KUKA/user |
| $CUSTOM.DAT | Y | 試運轉 | user/KUKA | |
| $CONFIG.DAT | Y | Y | 單元安裝或變換 | user/KUKA |
| $ROBCOR.DAT | Y | Y | 運輸 | KUKA |
審核編輯:劉清
-
機器人
+關注
關注
210文章
28231瀏覽量
206615 -
plc
+關注
關注
5008文章
13167瀏覽量
462193 -
可編程控制器
+關注
關注
6文章
535瀏覽量
38836 -
計時器
+關注
關注
1文章
419瀏覽量
32647
原文標題:KUKA 系統變量和系統文件
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論