") 基于優(yōu)化的多傳感器全局位姿估計框架
基于優(yōu)化的多傳感器全局位姿估計框架
摘要
精確狀態(tài)估計是自主機(jī)器人的基礎(chǔ)問題。為了實(shí)現(xiàn)局部精確且全局無漂移的狀態(tài)估計,通常將具有互補(bǔ)性質(zhì)的多傳感器融合到一起。局部傳感器(相機(jī)、IMU、激光雷達(dá)等)在小區(qū)域內(nèi)提供了精確的位姿,而全局傳感器(GPS、磁力計、氣壓計等)在大尺度環(huán)境中提供了有噪聲但是全局無漂移的定位。在本文中,我們提出一種傳感器融合框架將局部狀態(tài)與全局傳感器融合,這實(shí)現(xiàn)了局部精確且全局無漂移的位姿估計。由現(xiàn)有的VO/VIO方法產(chǎn)生的局部估計與全局傳感器在位姿圖優(yōu)化中融合。在圖優(yōu)化中,局部估計與全局坐標(biāo)對齊。同時,消除了累積漂移。我們在公開數(shù)據(jù)集和真實(shí)世界實(shí)驗中評估本文系統(tǒng)的性能。實(shí)驗結(jié)果再次與其它最新的算法進(jìn)行比較。我們強(qiáng)調(diào),本文系統(tǒng)是一種通用的框架,它能夠在統(tǒng)一的位姿圖優(yōu)化中輕易地融合各種全局傳感器。我們的實(shí)現(xiàn)已經(jīng)開源。
介紹
在過去幾十年中,自主機(jī)器人已經(jīng)成為主流的研究課題。我們已經(jīng)看到,在自動駕駛、檢查、搜索和救援等各種應(yīng)用中,對機(jī)器人的需求越來越迫切。自主任務(wù)的基礎(chǔ)技術(shù)之一為定位。機(jī)器人需要精確的6自由度(DoF)位姿進(jìn)行導(dǎo)航和控制。很多傳感器已經(jīng)被用于局部位姿估計。雷達(dá)和激光雷達(dá)廣泛應(yīng)用于受限的室內(nèi)環(huán)境,而相機(jī)和IMU在室內(nèi)和室外環(huán)境中都適用。
有很多令人印象深刻的算法用于局部位姿估計,例如基于視覺的方法和基于視覺-慣性的方法。這些算法在局部區(qū)域內(nèi)實(shí)現(xiàn)了增量式且精確的狀態(tài)估計。然而,存在一些缺陷限制了這些算法在實(shí)際中的使用。 局部位姿估計算法的第一個缺陷為,它們在局部坐標(biāo)系內(nèi)產(chǎn)生位姿估計(相對于起始點(diǎn)),而不是全局坐標(biāo)。當(dāng)我們即使從同一環(huán)境中的不同位置開始,我們也可能獲得不同的估計結(jié)果。因此,如果沒有固定的全局坐標(biāo),它們對復(fù)用是不友好的。第二個缺陷為,由于缺少全局測量數(shù)據(jù),在長期運(yùn)行過程中,局部估計容易累積漂移。
盡管已經(jīng)提出了一些基于視覺的回環(huán)方法來消除漂移,但是它們?nèi)匀粺o法處理帶有大量數(shù)據(jù)的大尺度環(huán)境。 與局部傳感器相比,GPS、氣壓計、磁力計等全局傳感器在大尺度環(huán)境中的全局定位方面具有優(yōu)勢。它們提供了相對于固定地球坐標(biāo)系的全局測量,這是沒有漂移的。然而,這些測量信息通常是非平滑且?guī)в性肼暤模虼藷o法直接用于精確控制和導(dǎo)航。以GPS為例,它能夠測量以米為單位的近似位置,但是該測量在低頻率下是不連續(xù)的。此外,它只能測量三維位置,而無法測量三維旋轉(zhuǎn)。
因此,僅有全局傳感器是不足以實(shí)時地進(jìn)行6自由度狀態(tài)估計的。 由于局部傳感器(相機(jī)、IMU和激光雷達(dá))在局部精確性方面實(shí)現(xiàn)了令人印象深刻的性能且全局傳感器(GPS、磁力計和氣壓計)是無漂移的,因此聰明的方式是將它們?nèi)诤系揭黄鹨詫?shí)現(xiàn)局部精確且全局無漂移的6自由度位姿估計。
為了提高魯棒性,我們想要融合盡可能多的傳感器。因此,需要一種支持多傳感器的通用框架。盡管傳統(tǒng)的基于EKF方法能夠逐漸地將局部估計融合到全局坐標(biāo)系中,但是需要有關(guān)不同坐標(biāo)系之間變換的精確初始值,以保證結(jié)果收斂。此外,EKF方法還對時間同步敏感。任何延遲傳入的測量數(shù)據(jù)將導(dǎo)致麻煩,因為無法在濾波過程中反向傳遞狀態(tài)。為此,我們使用一種基于優(yōu)化的方法來解決該問題,它本質(zhì)上適用于多傳感器融合。
在本文中,我們提出一種優(yōu)化框架來融合局部估計與全局傳感器測量。局部估計來自現(xiàn)有的最新VO/VIO工作。全局傳感器被作為位姿圖中的通用因子。局部傳感器和全局傳感器因子被累加到一起以構(gòu)建優(yōu)化問題。本文系統(tǒng)實(shí)現(xiàn)了局部精確且全局無漂移的狀態(tài)估計。我們強(qiáng)調(diào)本文貢獻(xiàn)如下: 1)一種通用的框架,將各種全局傳感器與局部估計融合,從而實(shí)現(xiàn)局部精確且全局無漂移的定位; 2)所提出系統(tǒng)在公開數(shù)據(jù)集和真實(shí)實(shí)驗中評估; 3)代碼對社區(qū)開源。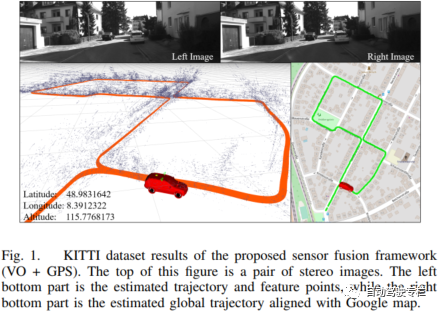
相關(guān)工作
最近,狀態(tài)估計的多傳感器融合方法已經(jīng)成為一種主流趨勢,以便提高精度和魯棒性。根據(jù)系統(tǒng)中使用的傳感器類型,研究工作能夠被分類為局部定位和全局定位。 對于局部定位,相機(jī)、IMU、激光雷達(dá)和RGB-D傳感器通常用于小規(guī)模環(huán)境中進(jìn)行6自由度狀態(tài)估計。
過去幾十年中令人印象深刻的方法包括基于視覺的方法、基于激光雷達(dá)的方法、基于RGB-D的方法和基于事件相機(jī)的方法。還有一些多傳感器融合方法,例如視覺-慣性融合和視覺-激光雷達(dá)融合。在這些工作中,工作A multi-state constraint Kalman filter for vision-aided inertial navigation、High-precision, consistent EKF-based visualinertial odometry和Robust visual inertial odometry using a direct ekf-based approach是基于濾波的方法,而工作Keyframe-based visual-inertial odometry using nonlinear optimization、Visual-inertial monocular slam with map reuse和Vins-mono: A robust and versatilemonocular visual-inertial state estimator是基于優(yōu)化的方法。在基于優(yōu)化的框架中,很多視覺測量數(shù)據(jù)和慣性測量數(shù)據(jù)被保留在一個捆集中。與觀測到的測量值相關(guān)的狀態(tài)被一起優(yōu)化。
基于優(yōu)化的方法相比于基于EKF的方法的一個優(yōu)勢在于,狀態(tài)可以迭代線性化以提高精度。基于濾波的方法和基于優(yōu)化的方法都可以實(shí)現(xiàn)高度精確的狀態(tài)估計。由于缺少全局測量,累積漂移隨著時間是不可避免的。 對于全局定位,系統(tǒng)集成了全局傳感器(GPS、磁力計、氣壓計等)。全局傳感器測量相對于地球坐標(biāo)系的絕對量,它們與起點(diǎn)無關(guān)。全局測量通常具有噪聲且頻率較低,所以它們不能夠單獨(dú)使用。所以,全局傳感器通常與局部傳感器融合,以實(shí)現(xiàn)精確且全局的定位。工作A robust and modular multi-sensor fusion approach applied to mav navigation提出一種基于EKF的算法,將視覺測量與慣性和GPS測量相融合,以獲得無漂移的估計。工作Multi-sensor fusion for robust autonomous flight in indoor and outdoor environments with a rotorcraft MAV使用無跡卡爾曼濾波(UKF)算法來融合視覺、激光雷達(dá)和GPS測量,它是EKF的擴(kuò)展,其沒有解析的雅可比。基于濾波的方法對時間同步很敏感。由于狀態(tài)無法在濾波過程中反向傳遞,所以任何延遲傳入的測量都會引起麻煩。因此,需要特殊的排序機(jī)制來確保來自多個傳感器的所有測量數(shù)據(jù)都是有序的。
與基于濾波的方法相比,基于優(yōu)化的方法在這方面具有優(yōu)勢。因為大的捆集作為一個天然的緩沖區(qū),它可以等待并且存儲很長一段時間的測量值。工作Gomsf: Graph-optimization based multi-sensor fusion for robust uav pose estimation使用一種基于優(yōu)化的框架來融合局部視覺慣性里程計(VIO)與GPS測量,這比工作A robust and modular multi-sensor fusion approach applied to mav navigation中提出的方法產(chǎn)生了更精確的結(jié)果。在該方法中,局部坐標(biāo)和全局坐標(biāo)之間的變換被經(jīng)常優(yōu)化。很少有研究工作融合超過三種類型的傳感器。在本文中,我們提出一種更通用的基于優(yōu)化的全局定位框架,它可以支持多個全局傳感器。每個傳感器作為一個通用的因子,其可以很容易地加入到優(yōu)化問題中。
系統(tǒng)概述
根據(jù)測量數(shù)據(jù)所在的參考系,我們將傳感器分類為局部類型和全局類型。
1)局部傳感器:相機(jī)、激光雷達(dá)、IMU(加速度計和陀螺儀)等。這類傳感器不是全局參考的,因此通常需要一個參考坐標(biāo)系。通常,機(jī)器人的首個位姿被設(shè)置為原點(diǎn),以便啟動傳感器。機(jī)器人的位姿估計從起點(diǎn)開始增量式地累積。因此,累積漂移將隨著距離起點(diǎn)距離的增加而增大。
2)全局傳感器:GPS、磁力計、氣壓計等。這類傳感器是全局參考的。它總是在一個固定的全局坐標(biāo)系(例如地球坐標(biāo)系)下工作。參考系的原點(diǎn)固定,并且事先是已知的。它們的測量數(shù)據(jù)是全局但是帶有噪聲的。其誤差與行駛距離無關(guān)。對于GPS,它測量相對于地球的絕對經(jīng)度、維度和高度。精度、維度和高度可以轉(zhuǎn)換為x、y和z坐標(biāo)。對于磁力計,它測量磁場方向和強(qiáng)度,這可以確定方向。對于氣壓計,它測量氣壓,這可以轉(zhuǎn)換成高度。 本文框架如圖2所示。局部傳感器(相機(jī)和IMU)被用于局部估計。采用現(xiàn)有的VO/VIO方法來產(chǎn)生局部位姿。局部結(jié)果和全局傳感器輸入到全局位姿圖中。它們被轉(zhuǎn)化為統(tǒng)一的因子來構(gòu)建優(yōu)化問題。全局估計器生成局部精確且全局的6自由度位姿結(jié)果。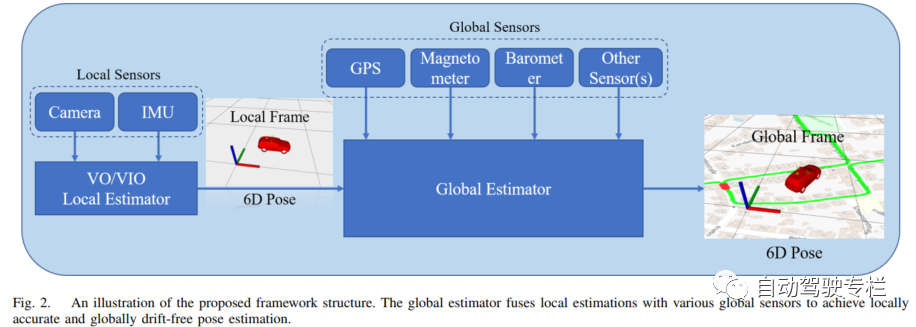
方法
A.局部位姿估計
對于局部位姿估計,我們采用現(xiàn)有的視覺里程計(VO)/視覺-慣性里程計(VIO)算法。有很多令人印象深刻的VO/VIO算法,例如工作Orb-slam: a versatile and accurate monocular slam system、A multi-state constraint Kalman filter for vision-aided inertial navigation和Vins-mono: A robust and versatile monocular visual-inertial state estimator。它們中任何一個可以在本框架中用于局部位姿估計,只要它能產(chǎn)生6自由度位姿。這部分不是本文的主要貢獻(xiàn)。出于完整性考慮,本文簡要介紹我們先前的VIO算法,其在我們的開源實(shí)現(xiàn)中使用。
VIO估計滑動窗口內(nèi)若干IMU幀的位姿和特征的深度。狀態(tài)量定義為:
其中,第個IMU狀態(tài)由IMU中心相對于局部參考系的位置、速度和姿態(tài)組成。我們使用四元數(shù)來表示姿態(tài)。首個IMU位姿被設(shè)置為參考幀。和分別為加速度計偏置和陀螺儀偏置。當(dāng)特征在相機(jī)幀中首次被觀測到時,使用它們的逆深度進(jìn)行參數(shù)化。估計問題被轉(zhuǎn)換成一個非線性最小二乘問題:
其中,和分別表示慣性和視覺殘差。先驗項包含關(guān)于過去邊緣化狀態(tài)的信息。表示魯棒huber核。VIO在局部坐標(biāo)系中實(shí)現(xiàn)了精確的實(shí)時6自由度位姿估計。
B.全局位姿圖結(jié)構(gòu)
全局位姿圖結(jié)構(gòu)的圖示如圖3所示。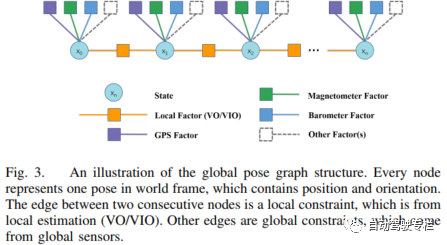
每個位姿包含世界坐標(biāo)系中位置和姿態(tài),其作為位姿圖中一個節(jié)點(diǎn)。節(jié)點(diǎn)的密度由最低頻率的傳感器確定。兩個連續(xù)節(jié)點(diǎn)之間的邊是一個局部約束,它來自于局部估計(VO/VIO)。該邊約束了一個節(jié)點(diǎn)到另一個節(jié)點(diǎn)的相對位姿。其它邊為全局約束,它來自全局傳感器。 位姿圖優(yōu)化的本質(zhì)是一個最大似然估計(MLE)問題。MLE由機(jī)器人位姿在一段時間上的聯(lián)合概率分布組成。變量為所有節(jié)點(diǎn)全局位姿,,其中,。和為全局坐標(biāo)系下位置和姿態(tài)。在所有測量概率是獨(dú)立的假設(shè)之下,問題通常被推導(dǎo)為: 其中,為測量值集合,其包括局部測量(VO/VIO)和全局測量(GPS、磁力計、氣壓計等)。我們假設(shè)測量的不確定性為具有均值和協(xié)方差的高斯分布,即。因此,上述方程推導(dǎo)為: Mahalanobis范數(shù)為。接著,狀態(tài)估計轉(zhuǎn)化為非線性最小二乘問題,這也被稱為捆集調(diào)整(BA)。
C.傳感器因子
1)局部因子:由于局部估計(VO/VIO)在小范圍區(qū)域內(nèi)是精確的,所以我們利用兩幀之間的相對位姿。考慮兩個連續(xù)幀和幀,局部因子推導(dǎo)為: 其中,和為來自VO/VIO的局部幀在時刻和的位姿。為四元數(shù)誤差狀態(tài)上的減法操作。第一行表示兩個位姿間相對位置誤差,第二行表示兩個位姿間相對旋轉(zhuǎn)誤差。如果VO/VIO算法產(chǎn)生位姿的協(xié)方差矩陣,我們使用它作為局部測量的協(xié)方差。否則,我們對所有的局部測量使用統(tǒng)一的協(xié)方差。
2)GPS因子:GPS的原始測量值為經(jīng)度、緯度和海拔高度,其不是x、y和z軸坐標(biāo)。通常,我們可以將經(jīng)度、緯度和海拔高度轉(zhuǎn)換為地心地固(ECEF)坐標(biāo),局部東北天(ENU)坐標(biāo)和局部北東地(NED)坐標(biāo)。這里,我們?nèi)NU坐標(biāo)為例。通過設(shè)置首個GPS測量為原點(diǎn),我們獲得ENU世界坐標(biāo)系中的GPS測量數(shù)據(jù),。GPS因子推導(dǎo)為: GPS測量直接約束每個節(jié)點(diǎn)的位置。當(dāng)接收到測量數(shù)據(jù)時,協(xié)方差由衛(wèi)星的數(shù)量確定。當(dāng)接收到越多衛(wèi)星信號,協(xié)方差就越小。
3)磁力計因子:磁力計可以測量磁場強(qiáng)度的矢量。這個矢量的方向可以幫助確定世界坐標(biāo)系中的姿態(tài)。我們假定磁力計是經(jīng)過離線標(biāo)定的,沒有偏移或者偏置。首先,我們查表以獲得ENU坐標(biāo)系中局部區(qū)域的磁場強(qiáng)度。我們假設(shè)磁場強(qiáng)度在這個區(qū)域內(nèi)是恒定的。我們的測量數(shù)據(jù)表示為。如果我們將傳感器與ENU坐標(biāo)對齊,則的姿態(tài)應(yīng)該與匹配。受此啟發(fā),因子推導(dǎo)為: 其中,為機(jī)器人中心到磁力計中心的變換,這是已知且經(jīng)過離線標(biāo)定的。由于磁場容易受到環(huán)境影響,我們僅使用沒有長度的歸一化向量。長度被用于確定協(xié)方差。如果測量的長度與相差很大,我們就設(shè)置一個大的協(xié)方差。否則,我們使用一個小的協(xié)方差。
4)氣壓計因子:氣壓計測量一個地區(qū)的氣壓。我們假設(shè)一段時間內(nèi)某一海拔高度上的氣壓是恒定的。因此,氣壓可以線性地轉(zhuǎn)換為高度。與GPS相同,我們設(shè)置首個測量為原始高度。接著,我們獲得高度的測量值。直觀而言,該因子為高度估計的殘差,其寫為: 由于該測量具有噪聲,因此我們計算短時間內(nèi)若干測量的方差,并且在代價函數(shù)中使用它。
5)其它全局因子:盡管我們僅詳細(xì)說明GPS因子、磁力計因子和氣壓計因子,但是我們的系統(tǒng)不限于這些全局傳感器。本文系統(tǒng)也可以使用其它全局傳感器,甚至一些人工傳感器(例如運(yùn)動捕捉系統(tǒng)、WiFi和藍(lán)牙指紋)。關(guān)鍵是將這些測量建模為全局坐標(biāo)系下的殘差因子。
D.位姿圖優(yōu)化
一旦構(gòu)建了位姿圖,優(yōu)化它等價于尋找盡可能匹配所有邊的節(jié)點(diǎn)配置。Ceres求解器用于求解該非線性問題,它以迭代的方式利用Gaussian-Newton和Levenberg -Marquadt方法。 我們以低頻率(1Hz)運(yùn)行位姿圖優(yōu)化。在每次優(yōu)化后,我們獲得局部坐標(biāo)系到全局坐標(biāo)系的變換。因此,我們可以通過這一變換來轉(zhuǎn)換隨后的高頻局部位姿(VO/VIO,200Hz),以獲取實(shí)時高頻的全局位姿。由于位姿圖是相當(dāng)稀疏的,所以計算復(fù)雜度隨位姿數(shù)量線性增加。我們可以維持一個巨大的窗口進(jìn)行位姿圖優(yōu)化,以獲取精確且全局無漂移的位姿估計。當(dāng)計算復(fù)雜度超過實(shí)時能力時,我們丟棄舊的位姿和測量數(shù)據(jù),并且將窗口規(guī)模維持在有限的尺寸。
審核編輯:劉清
-
多傳感器
+關(guān)注
關(guān)注
0文章
80瀏覽量
15347 -
激光雷達(dá)
+關(guān)注
關(guān)注
967文章
3939瀏覽量
189598 -
IMU
+關(guān)注
關(guān)注
6文章
298瀏覽量
45676 -
磁力計
+關(guān)注
關(guān)注
1文章
71瀏覽量
20840
原文標(biāo)題:一種通用的基于優(yōu)化的多傳感器全局位姿估計框架
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
液位傳感器怎么安裝和使用呢
SHxxx傳感器集線器,最多支持100組頻率+溫度傳感器接入,滿足您的多通道需求
無線液位傳感器的應(yīng)用
LMP90100和LMP9009x傳感器AFE系統(tǒng):多通道低功耗24位傳感器AFE數(shù)據(jù)表

LMP90080-Q1多通道16位傳感器模擬前端(AFE)數(shù)據(jù)表
液位傳感器電路圖 帶Arduino的SST液位傳感器設(shè)計
液位傳感器的傳感方式
液位傳感器怎么判斷好壞 液位傳感器三根線怎么接
?液位傳感器類型和工作原理

液位傳感器的接線方法及工作原理
單點(diǎn)液位傳感器與多點(diǎn)液位傳感器有哪些不同呢?
?光電液位傳感器對比電容式液位傳感器
傳感器抽象框架有哪些
液位傳感器選擇常開還是常閉





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論