") 教你如何看懂波特圖
教你如何看懂波特圖
波特圖的主要功能是用來(lái)表示系統(tǒng)的頻率特性,包括幅頻特性和相頻特性。假設(shè)有一個(gè)系統(tǒng)用于跟隨正弦波,當(dāng)輸入一個(gè)正弦波時(shí),輸出也是一個(gè)正弦波,但是輸入、輸出在幅值和相位上是會(huì)有差異的,在時(shí)域如下圖所示。
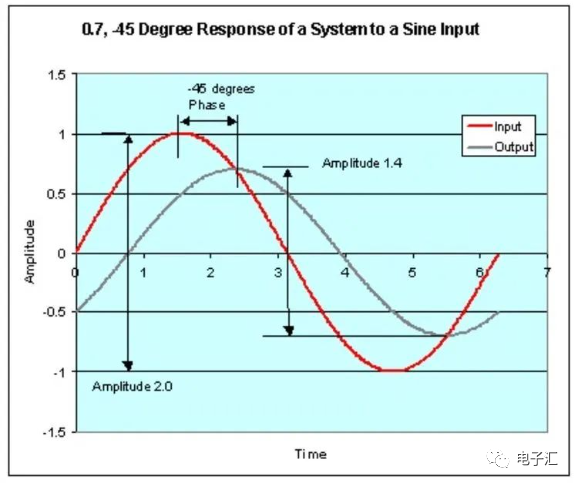
從上圖可知在某一頻率下該系統(tǒng)的幅值增益為20lg(1.4/2.0)=-3.1dB,相移(滯后角)為-45°(負(fù)數(shù)表示滯后)。當(dāng)輸入的頻率不同,幅值增益和相相移也會(huì)變化,顯然在時(shí)域上是很難表示系統(tǒng)在不同頻率下的輸出,在此引入了波特圖,用于表示系統(tǒng)在不同頻率下的特性,即幅值變化的比例和相移的程度。定義波特圖的橫坐標(biāo)為頻率,縱坐標(biāo)為增益和相移并以對(duì)數(shù)的形式表示(對(duì)數(shù)能放大坐標(biāo))。我們改變輸入信號(hào)的頻率,并測(cè)出在不同頻率下輸出信號(hào)的幅值和相移,并計(jì)算進(jìn)行坐標(biāo)轉(zhuǎn)換,就可繪制出如下的某一理想電機(jī)的開(kāi)環(huán)和閉環(huán)波特圖。
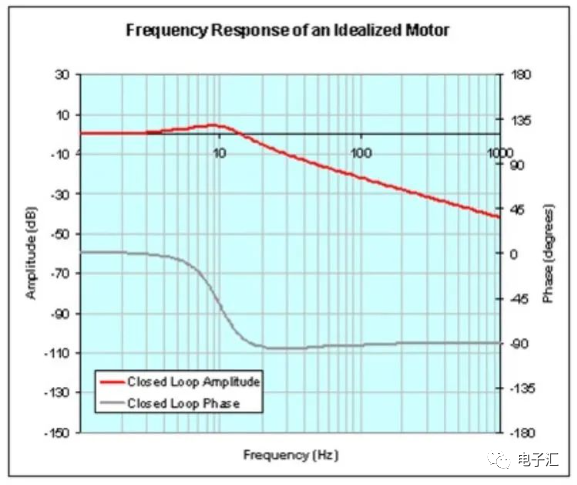
上圖理想電機(jī)的波特圖分為開(kāi)環(huán)和閉環(huán)兩個(gè)曲線,閉環(huán)系統(tǒng)是指輸出信號(hào)反饋到輸入端參與控制,從兩根曲線可以讀出不同的信息。通過(guò)開(kāi)環(huán)系統(tǒng)的幅頻曲線和相頻曲線可以獲得系統(tǒng)的幅值裕度和相位裕度來(lái)判斷系統(tǒng)的穩(wěn)定性。規(guī)定當(dāng)輸入某頻率信號(hào)時(shí)幅值增益為0dB時(shí),該頻率下輸出的相移角+180°為開(kāi)環(huán)系統(tǒng)的相位裕度。下圖所示的系統(tǒng)的相位裕度為180°+(-147°)=33°。規(guī)定當(dāng)輸入某頻率信號(hào),系統(tǒng)的輸出相移為-180°(輸出翻轉(zhuǎn))時(shí),其輸出幅值增益為系統(tǒng)的增益裕度(幅值裕度),下圖的系統(tǒng)的幅值裕度為0-32.5dB=32.5dB
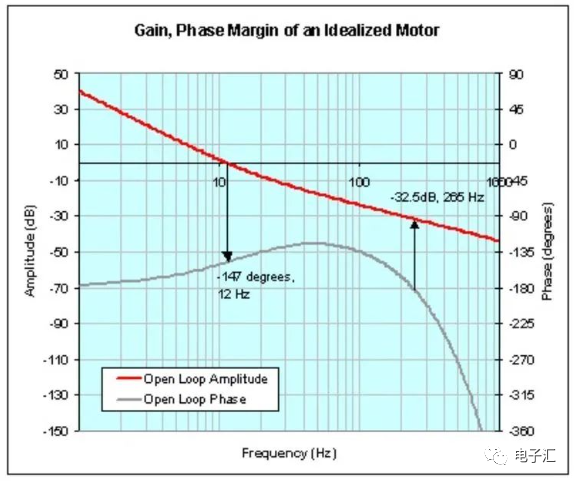
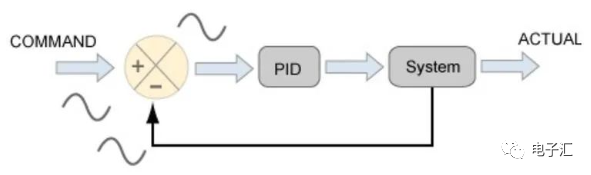
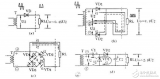
上圖系統(tǒng)的幅值裕度為32.5dB,相位裕度為33dB,系統(tǒng)穩(wěn)定。為了保證系統(tǒng)在閉環(huán)控制下能穩(wěn)定,一般要求系統(tǒng)的相位裕度大于45°。當(dāng)系統(tǒng)的幅值裕度為0,相位裕度為0就會(huì)發(fā)生自激振蕩,在控制上是不穩(wěn)定系統(tǒng)。下面分析增益為0dB,相移為-180°的系統(tǒng)的特性。如下圖所示的PID控制系統(tǒng),當(dāng)系統(tǒng)在某一頻率的開(kāi)環(huán)增益為0dB,開(kāi)環(huán)相移為-180°,引入反饋構(gòu)成閉環(huán)控制。PID控制的輸入量ERR=INPUT-OUTPUT,系統(tǒng)的開(kāi)環(huán)輸出相移為-180°,因?yàn)橛?jì)算出來(lái)的誤差值將翻倍,構(gòu)成了一個(gè)正反饋系統(tǒng),系統(tǒng)是不穩(wěn)定的。
在調(diào)PID參數(shù)時(shí)候,不同參數(shù)下的系統(tǒng)階躍響應(yīng)如下圖所示,可分為欠阻尼、過(guò)阻尼、臨界阻尼系統(tǒng)。
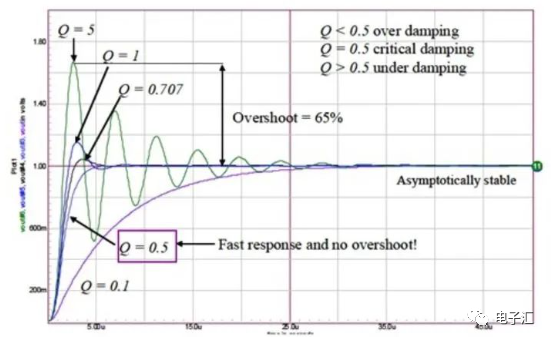
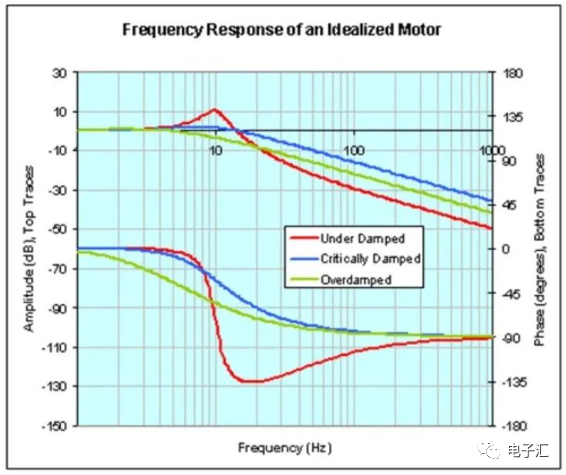
欠阻尼、過(guò)阻尼、臨界阻尼系統(tǒng)的波特圖如下圖所示。
另外,根據(jù)系統(tǒng)的波特圖也可以進(jìn)行控制系統(tǒng)的校正,這是波特圖最大的用途。
-
控制系統(tǒng)
+關(guān)注
關(guān)注
41文章
6546瀏覽量
110485 -
正弦波
+關(guān)注
關(guān)注
11文章
638瀏覽量
55262 -
電機(jī)
+關(guān)注
關(guān)注
142文章
8933瀏覽量
145098 -
波特圖
+關(guān)注
關(guān)注
1文章
29瀏覽量
11306 -
相頻特性
+關(guān)注
關(guān)注
0文章
8瀏覽量
10446
原文標(biāo)題:教你如何看懂波特圖
文章出處:【微信號(hào):電子匯,微信公眾號(hào):電子匯】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
教你如何看懂SIGMA鏡頭標(biāo)識(shí)
教你認(rèn)識(shí)如何看懂集成電路的線路圖
[門(mén)老師教你快速看懂電子電路圖].門(mén)宏.掃描版
教你如何看懂電路圖
教你三步看懂電路圖
教你看懂移動(dòng)電源的參數(shù)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論