") 用宇凡微YF單片機寫掛脖風扇方案
用宇凡微YF單片機寫掛脖風扇方案
接下來,我們可以將風扇和電機控制電路連接起來,并在YF單片機上編寫程序?qū)崿F(xiàn)控制。
首先,需要將電機接到電路中。在本方案中,我們使用的是直流無刷電機,需要一個驅(qū)動器來控制電機的轉(zhuǎn)速和方向。常用的驅(qū)動器有H橋電路和電調(diào)模塊。這里我們使用L298N作為驅(qū)動器。
接下來,將L298N的IN1和IN2分別接到Y(jié)F單片機的P1.0和P1.1引腳上,用來控制電機的正反轉(zhuǎn)。然后,將L298N的ENA引腳接到Y(jié)F單片機的P1.2引腳上,用來控制電機的轉(zhuǎn)速。
最后,編寫程序?qū)崿F(xiàn)控制。以下是一個簡單的程序示例,實現(xiàn)了在不同速度下正反轉(zhuǎn)控制:
cCopy code#include
#include
#define ENA P1_2
#define IN1 P1_0
#define IN2 P1_1
void delay_ms(unsigned int ms) // 延時函數(shù)
{
unsigned int i, j;
for (i = ms; i > 0; i--)
for (j = 114; j > 0; j--);
}
void main()
{
while (1)
{
ENA = 1;
IN1 = 1;
IN2 = 0;
delay_ms(1000); // 向一個方向轉(zhuǎn)1秒
ENA = 1;
IN1 = 0;
IN2 = 1;
delay_ms(1000); // 向另一個方向轉(zhuǎn)1秒
ENA = 128; // 占空比為50%
IN1 = 1;
IN2 = 0;
delay_ms(2000); // 向一個方向轉(zhuǎn)2秒,速度為50%
ENA = 200; // 占空比為78%
IN1 = 0;
IN2 = 1;
delay_ms(2000); // 向另一個方向轉(zhuǎn)2秒,速度為78%
}
}
以上代碼中,我們使用了一個延時函數(shù)來實現(xiàn)等待時間,控制電機轉(zhuǎn)向和轉(zhuǎn)速。
最后,讓我們來介紹一下宇凡微YF單片機。YF單片機是宇凡微電子推出的一款高性價比的8位單片機,可與51系列單片機兼容。它具有低功耗、高性能和易于開發(fā)等優(yōu)點,適用于各種嵌入式應用場景。宇凡微還提供了完善的技術(shù)支持,方便開發(fā)者快速上手并進行開發(fā)。
審核編輯:湯梓紅
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學習之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
單片機
+關注
關注
6032文章
44521瀏覽量
633113 -
電機
+關注
關注
142文章
8935瀏覽量
145111 -
風扇
+關注
關注
4文章
410瀏覽量
37404
發(fā)布評論請先 登錄
相關推薦
宇凡微榮膺西九龍邊檢站表彰:政企共繪鄉(xiāng)村教育扶貧新圖景
9月26日,深圳邊檢總站西九龍邊檢站站黨委書記、站長周偉華,站黨委副書記、政委謝千濤,站黨委委員、副站長崔曉鋒,政治處副主任吳瑛,執(zhí)勤五隊一級警長喻敏,廣東省粵港澳大灣區(qū)戰(zhàn)略性新興產(chǎn)業(yè)發(fā)展促進會鄉(xiāng)村振興專委會、證通電子胡艷平等一行領導,對宇凡

用8位單片機,32位單片機就找英銳恩!
單片機)中有軟硬研發(fā)設計、系統(tǒng)開發(fā)編程、工具應用支持、專項集成解決方案等領域有十多年的實力,從市場信息調(diào)研、應用開發(fā)、產(chǎn)品研發(fā)、定制設計等技術(shù)服務;再從售前咨詢,售中技術(shù)支持,售后增值服務,擁有經(jīng)驗豐富的工程技術(shù)團隊與資深的
宇凡微超聲波霧化模塊,高效霧化“芯”時代,打造行業(yè)標桿
廠商競相角逐的焦點。宇凡微憑借其自主研發(fā)的超聲波霧化模塊,在加濕器領域掀起了一場技術(shù)革新的風暴,為行業(yè)樹立了新的標桿。

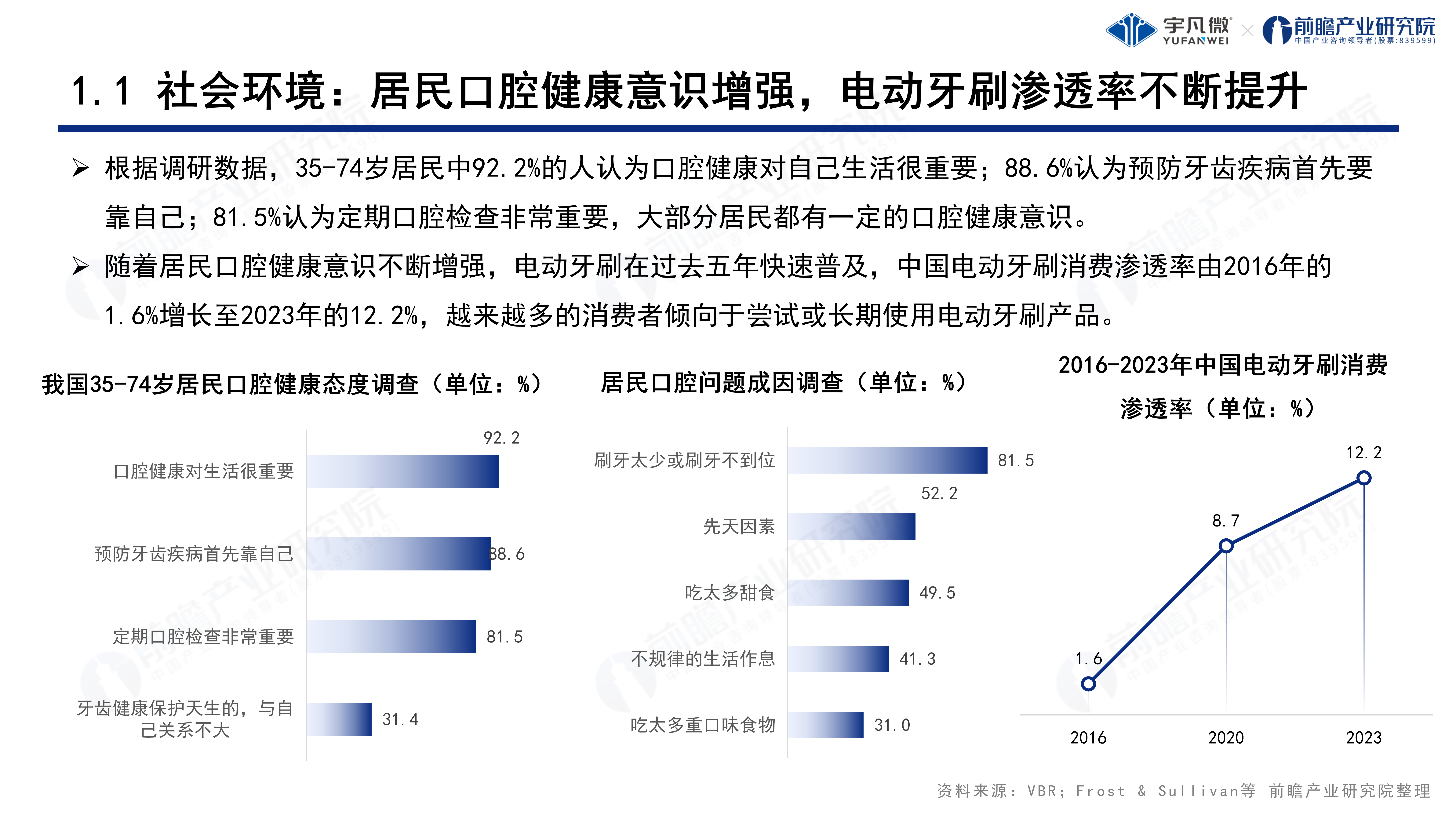
解鎖電動牙刷方案新玩法!宇凡微聯(lián)合前瞻研究院發(fā)布業(yè)內(nèi)首份《電動牙刷伺服電機洞察白皮書》
宇凡微聯(lián)合前瞻研究院耗時三個月對電動牙刷方案開發(fā)進行了深度調(diào)研,共同發(fā)布了《電動牙刷行業(yè)洞察白皮書》,白皮書從產(chǎn)業(yè)變革角度剖析了電動牙刷伺服電機關鍵技術(shù)迭代過程,結(jié)合產(chǎn)業(yè)大數(shù)據(jù)和多品牌
單片機STM32可以用Python寫嗎?可以的開發(fā)板有哪些?
近年來,隨著嵌入式技術(shù)的發(fā)展,Python語言逐漸被引入到單片機開發(fā)中,尤其是一些高性能的單片機上。這一趨勢給開發(fā)者帶來了極大的便利,尤其是在快速原型設計和實驗中。本文將詳細探討STM32單片機是否

stm32單片機用什么軟件編程
STM32單片機是一種廣泛應用于嵌入式系統(tǒng)領域的微控制器,具有高性能、低功耗、豐富的外設接口等特點。要對STM32單片機進行編程,需要選擇合適的軟件工具。 概述 STM32單片機
單片機燒錄程序用什么軟件
單片機燒錄程序是單片機開發(fā)過程中的一個重要環(huán)節(jié),涉及到將編寫好的程序代碼通過燒錄器寫入單片機的ROM中,以實現(xiàn)對單片機的控制。 燒錄器的類型 燒錄器是用于將程序代碼寫入
深圳聚焦:宇凡微2024個護模塊發(fā)布會圓滿落幕,共繪行業(yè)新藍圖
8月22日,宇凡微在深圳成功舉辦“模塊革新潮·引領新個護” 2024模塊新品發(fā)布會,活動圓滿落幕,反響熱烈,彰顯了宇凡
發(fā)表于 08-26 15:15
?162次閱讀

基于STM32單片機的智能溫控風扇系統(tǒng)設計
系統(tǒng)通過STM32單片機進行主控,系統(tǒng)內(nèi)通過溫度傳感器進行溫度檢測,并通過顯示屏進行顯示。系統(tǒng)內(nèi)分為手動和自動兩種控制方式,在手動模式下通過按鍵可以調(diào)節(jié)風扇的檔位,檔位越高轉(zhuǎn)速越高,在自動模式下根據(jù)設置的溫度閾值來啟動風扇啟動。
基于51單片機DS18B20溫度采集控制風扇設計
本資源內(nèi)容概要:? ? ? ?這是基于51單片機DS18B20溫度采集控制風扇設計包含了電路圖源文件(Altiumdesigner軟件打開)、C語言程序源代碼(keil軟件打開)、元件清單
發(fā)表于 06-26 10:43
?0次下載
網(wǎng)紅爆款渦輪風扇13萬轉(zhuǎn)無刷電機手持高速暴力風扇方案32位單片機
款渦輪風扇13萬轉(zhuǎn)無刷電機手持高速暴力風扇方案32位單片機手持高速暴力風扇主控芯片MM32SPIN080C高性能的單電機控制SOC產(chǎn)品,集成
合封芯片開發(fā)就找宇凡微,提供合封芯片技術(shù)支持與資訊
本文將深入剖析宇凡微在合封芯片開發(fā)方面的實力與優(yōu)勢,包括技術(shù)創(chuàng)新力、產(chǎn)品多樣性、項目經(jīng)驗和技術(shù)支持體系。宇凡
專業(yè)的合封芯片企業(yè),合封芯片的賦能者——宇凡微
本文主要介紹了一家名為宇凡微的半導體集成電路主控芯片實力廠家,及其合封芯片技術(shù)在電子設備制造中的應用。合封芯片技術(shù)具有高集成度、高性能、低功耗和小型化等特點,廣泛應用于射頻通信、消費電子和智能家居等領域。
單片機的燒寫次數(shù)是不是無限的呢?單片機能燒錄多少次?
單片機的燒寫次數(shù)是不是無限的呢?單片機能燒錄多少次? 單片機的燒寫次數(shù)是有限的,每款單片機都有一
你用過哪些編程語言開發(fā)單片機?
C語言是最常用的一種用于單片機的開發(fā)語言,也是一種高級編程語言,具有較好的可移植性和可讀性。對于單片機,通常使用嵌入式C來進行開發(fā)。 舉例:用C語言寫一段STM32
發(fā)表于 12-04 10:18
?1287次閱讀





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論