 如何在工業驅動器中實現精密的運動控制
如何在工業驅動器中實現精密的運動控制
乘坐電梯時,您肯定希望平穩安全地從一層到達另一層。在電梯驅動中,精密的運動控制使電梯能夠停在指定位置,并平穩地減速直到完全停止。缺乏精密的運動控制可能會導致電梯誤停在兩層之間,這會讓乘坐電梯的人感到頭暈不適或不安全。
機器人、計算機數控機器和工廠自動化設備都需要通過伺服驅動器進行精密的位置控制,此外在許多情況下還需要進行精密的速度控制,以便正確地制造產品并維護工作流程。
工業驅動器的諸多方面都對實現精密的運動控制很重要,精密運動控制涉及實時控制設計中的三個基礎子系統,即感應、處理和驅動。本文將論述各個子系統的支持技術示例。
感應
缺乏精密的位置和速度感應,就無法實現精密的運動控制。感應可以包括電機軸角位置和速度感應或傳送帶線性位置和速度感應。設計人員經常使用增量式光學編碼器,每轉有幾百到一千個槽,以感應位置和速度。這些編碼器通常通過正交編碼脈沖 (QEP) 連接到微控制器 (MCU),因此需要 QEP 接口功能。
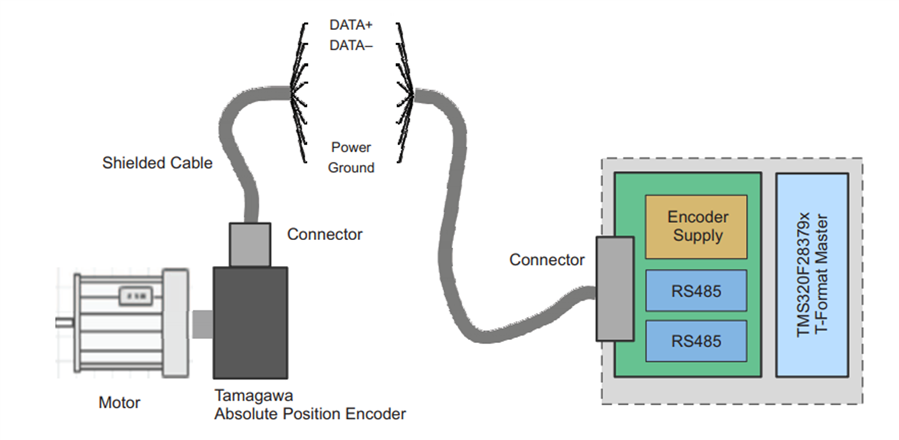
相比之下,絕對編碼器的精度明顯更高,其通常每轉具有更多的槽數,并且經過精密安裝以提供絕對角位置。感應到的位置被轉換為數字表示形式,并根據標準協議進行編碼。此類協議的示例有 Tamagawa 的 T-Format 和 iC-Haus GmbH 的雙向串行同步 (BiSS) C。此前,您還需要現場可編程門陣列 (FPGA) 來連接此類編碼器,但現在越來越多的 MCU 也具有此功能(如下圖 1 所示)。由于 T-Format 和 BiSS C 協議通常與大多數 MCU 上常見的串行外設接口 (SPI)、通用異步接收器發送器 (UART) 或控制器局域網 (CAN) 等流行通信端口或接口所支持的協議不同,因此它們通常需要可定制邏輯塊或專有處理單元。
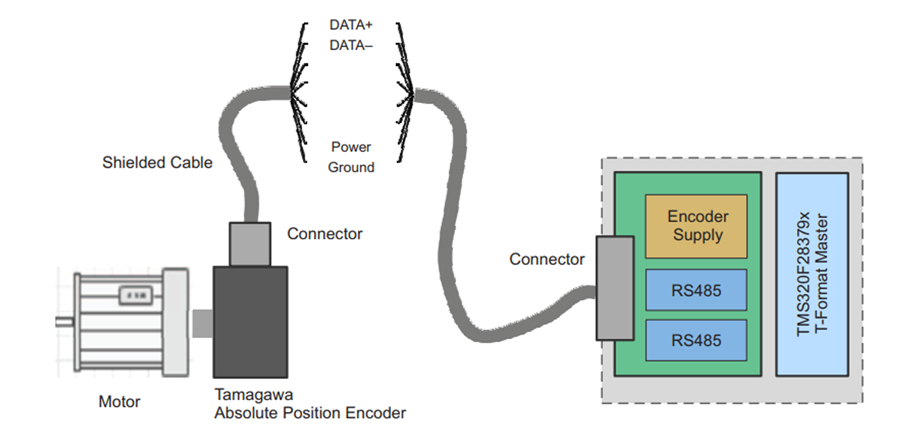
圖 1:連接到德州儀器控制 MCU 的絕對編碼器
絕對編碼器也可以基于電磁或類旋轉變壓器電路,這需要精確測量正弦電信號。因此,精密運算放大器和電壓基準也很重要。電機和運動控制始終需要精確的電機電流和電壓檢測,尤其是在采用無傳感器控制時。常見的解決方案是使用隔離/非隔離式放大器和集成低側電流檢測的驅動器的內聯和逆變器橋臂低側檢測。
處理
在精密運動控制系統中執行運動控制配置文件和算法需要具有高計算能力的 MCU。為了提供必要的精度和準確度,此類 MCU 的字長通常為 32 位,并具有原生 64 位浮點支持。由于算法嚴重依賴三角函數、對數和指數數學,因此許多 MCU 都具有硬件加速器。
考慮到受控運動軸的數量或控制環路的數量,設計人員經常采用多中央處理器 (CPU) 架構或類 CPU 的并行加速器。如有額外的監督和通信任務,也可以考慮采用多個 CPU。
作為實時控制應用,整個信號鏈的總延遲(即從收集到電流、電壓、位置和速度測量結果到更新控制輸出的時間)會直接影響控制性能,進而影響精度。一些 MCU 具有片上模擬比較器,可以直接生成控制動作,顯著減少延遲和 CPU 負荷。快速中斷響應以及現場保存和恢復也很重要。
僅僅擁有高處理能力是不夠的。運動控制 MCU 還必須具有通用控制外設,例如 12 位和 16 位模數轉換器、QEP 接口、高分辨率邊沿和脈沖捕獲以及脈寬調制 (PWM) 輸出。另外,還要求具備實現自定義邏輯和時序的能力。
為了幫助設計人員更快上手和調整他們的設計,MCU 和電機驅動器供應商提供了電機和運動控制算法,包括無傳感器觀測器和軟件庫等核心算法以及具有 GUI 可配置性的完整控制代碼。
圖 2 是工業驅動器控制 MCU 的概念圖。
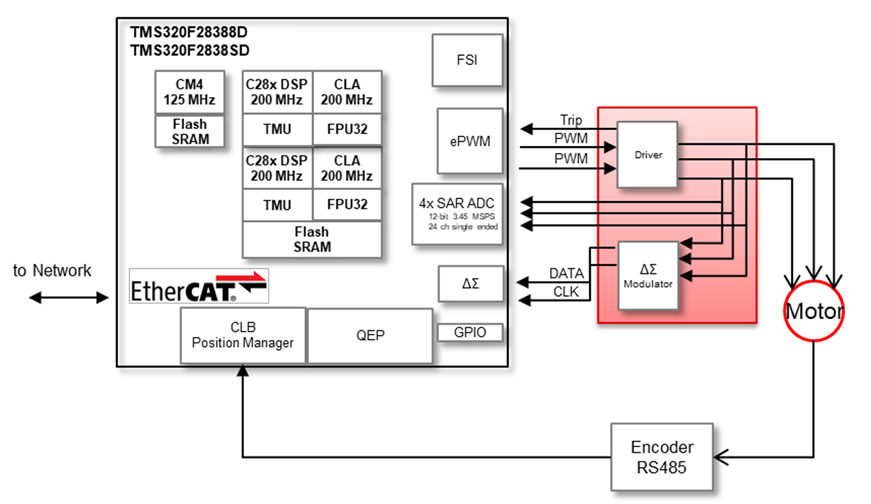
圖 2:工業驅動器的 MCU
驅動
提供預期的控制動作需要功率器件和驅動器,通常采用 PWM 形式,占空比代表動作。精確控制 PWM 脈沖非常重要,這意味著驅動器必須以盡可能小的時序偏差提供必要的驅動強度;功率器件必須在確切的預定時間打開和關閉。如今,此類驅動器隨處可見,并具有過流和過熱保護等附加功能。新型寬帶隙功率器件可以確保快速和精確地進行開啟和關閉定時。寬帶隙器件的快速開關速度和低開關損耗還可實現快速控制環路,以提高穩定性和性能。
除了精度之外,許多應用還要求電機控制設計足夠緊湊,因此需要用到具有集成電流檢測和電源模塊的驅動器。
結語
精密運動控制對于工業驅動器至關重要。技術解決方案涉及實時控制設計的所有三個基礎子系統,即感應、處理和驅動,旨在實現精密的運動控制。
審核編輯:郭婷
-
mcu
+關注
關注
146文章
17008瀏覽量
350349 -
編碼器
+關注
關注
45文章
3600瀏覽量
134191 -
電機
+關注
關注
142文章
8938瀏覽量
145123
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論