") 聯(lián)合空譜信息的高光譜圖像噪聲估計(jì)
聯(lián)合空譜信息的高光譜圖像噪聲估計(jì)
引言
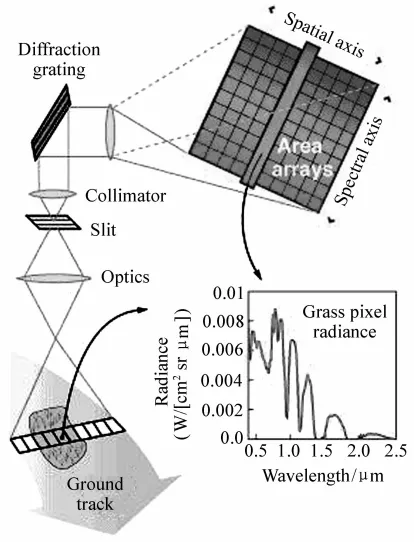
高光譜圖像是成像光譜儀對(duì)地物目標(biāo)的成像結(jié)果,廣泛應(yīng)用于軍事偵查、生態(tài)監(jiān)控、礦質(zhì)探測(cè)等領(lǐng)域。然而,高光譜圖像光譜分辨率高,波段間隔較窄,更容易被噪聲所破壞。精確估計(jì)高光譜圖像的噪聲水平,對(duì)去噪、降維、分類等后續(xù)處理至關(guān)重要。成像光譜儀數(shù)據(jù)的噪聲主要包括周期性噪聲和隨機(jī)噪聲,其中周期性噪聲可以由頻域變換濾波消除,而隨機(jī)噪聲的影響一直存在。一般認(rèn)為這種隨機(jī)噪聲是加性噪聲,用模型表示為

式中:y(i,j)為包含噪聲的圖像;x(i,j)為無噪的原始圖像;n(i,j)為待估計(jì)的噪聲,通常噪聲為零均值的高斯噪聲,概率密度函數(shù)為

因此,對(duì)噪聲水平的估計(jì),即是對(duì)噪聲標(biāo)準(zhǔn)差σn的估計(jì)。
同質(zhì)區(qū)域劃分是許多噪聲估計(jì)方法的關(guān)鍵步驟。Achanta等提出了一種基于K?means聚類的超像素分割算法,稱為簡(jiǎn)單線性迭代聚類(SLIC)。它可以將圖像中的像素沿著目標(biāo)邊界對(duì)圖像進(jìn)行分割,得到局部結(jié)構(gòu)相似的圖像塊。基于這一特性,本文將其與多元線性回歸模型結(jié)合,提出了基于超像素分割的光譜去相關(guān)法。該方法結(jié)合了SLIC和多元線性回歸模型的優(yōu)點(diǎn),將SLIC結(jié)合光譜?空間相似性應(yīng)用到高光譜圖像同質(zhì)區(qū)域劃分中,可以得到精確的同質(zhì)區(qū)域分割結(jié)果,克服了剛性的矩形劃分所帶來的同質(zhì)區(qū)域劃分不精確的影響。隨后利用多元線性回歸模型在劃分的同質(zhì)區(qū)域內(nèi)去除光譜相關(guān)性,得到了更純凈的噪聲殘差圖,使得噪聲估計(jì)更為準(zhǔn)確。
噪聲估計(jì)方法
高光譜圖像光譜分辨率高,通常可達(dá)2~10nm,相鄰波段間具有較強(qiáng)的光譜相關(guān)性,基于這一特點(diǎn),多元線性回歸模型被廣泛應(yīng)用于高光譜圖噪聲估計(jì)。此類方法通常將圖像劃分為矩形塊,在每個(gè)矩形區(qū)域內(nèi)利用多元線性回歸去除光譜相關(guān)性,得到近似為噪聲的殘差圖。本文方法在多元線性回歸模型基礎(chǔ)之上,結(jié)合SLIC算法,將相似的光譜曲線聚類,以得到局部結(jié)構(gòu)相似的同質(zhì)區(qū)域劃分。在同質(zhì)區(qū)域內(nèi),由于光譜曲線相似,其相鄰波段間的回歸系數(shù)也相似,相比于在矩形區(qū)域內(nèi)直接應(yīng)用多元線性回歸模型,在同質(zhì)區(qū)域內(nèi)應(yīng)用多元線性回歸可以得到更精確的噪聲殘差圖。本文方法具體步驟如下:
(1)利用超像素分割將高光譜圖像按空間地物類別劃分同質(zhì)區(qū)域;
(2)利用多元線性回歸計(jì)算每個(gè)區(qū)域噪聲標(biāo)準(zhǔn)差的估計(jì);
(3)在殘差圖中計(jì)算噪聲的最佳估計(jì)值。
2.1 超像素分割
超像素算法通過聚類將像素分組為局部結(jié)構(gòu)相似的不規(guī)則圖像塊。SLIC是一種使用廣泛的超像素分割方法,相較于其他超像素分割方法,SLIC有更好的邊界劃分能力。在SLIC算法基礎(chǔ)之上,結(jié)合光譜?空間相似性,將高光譜圖像按空間地物類別劃分同質(zhì)區(qū)域,可以獲得更精確的同質(zhì)區(qū)域劃分。對(duì)于一個(gè)空間尺寸為M1×M2,波段數(shù)為M3的高光譜圖像,將其在空間平面上初始劃分為K個(gè)六邊形網(wǎng)格,即設(shè)置超像素初始形狀為六邊形,這與SLIC的矩形初始劃分方式不同,其目的是使得超像素分割結(jié)果有類似于六連接的特性,便于后續(xù)超像素合并的連通域處理。此時(shí),兩個(gè)相鄰六邊形中心點(diǎn)之間的距離為
定義k個(gè)聚類中心為

式中(wk,hk)和vk分別為第k個(gè)聚類中心的空間坐標(biāo)和光譜特征向量。為了充分利用光譜信息,選擇光譜信息散度和光譜角結(jié)合作為光譜相似性度量,其表達(dá)式為

式中:dv(i,k)表示像素點(diǎn)i到聚類中心Ck的光譜距離;SID和SAM分別表示光譜信息散度和光譜角,將這兩個(gè)度量結(jié)合起來可以提高光譜之間的區(qū)分能力。對(duì)于空間相似性,定義為像素點(diǎn)與聚類中心之間坐標(biāo)的歐氏距離為

式中參數(shù)λ用于調(diào)節(jié)空間距離與光譜距離,其值越大,超像素越緊湊。基于所提出的光譜?空間距離,采用K?means聚類算法將每個(gè)像素分配給最近的聚類中心。對(duì)于每個(gè)聚類中心,SLIC只需要搜索其2S×2S范圍內(nèi)像素點(diǎn)即可,這極大地減少了迭代時(shí)間。
2.2 噪聲標(biāo)準(zhǔn)差估計(jì)
將圖像劃分為多個(gè)同質(zhì)區(qū)域后,每個(gè)同質(zhì)區(qū)域內(nèi)可認(rèn)為是由同一類型的地物組成。高光譜圖像光譜分辨率高,相鄰波段之間有較強(qiáng)的光譜相關(guān)性,故波段k可以用波段k-1和k+1線性表示。在同質(zhì)區(qū)域內(nèi),各像素點(diǎn)相鄰波段之間有相似的線性關(guān)系。因此,在每個(gè)同質(zhì)區(qū)域內(nèi)可借助多元線性回歸模型對(duì)波段k中像素點(diǎn)進(jìn)行估計(jì),通過將真實(shí)值與估計(jì)值作差,得到波段k的殘差圖。而噪聲數(shù)據(jù)不具有相關(guān)性,去相關(guān)后的殘差圖可近似為噪聲,利用所得殘差圖的標(biāo)準(zhǔn)差即可估計(jì)頻帶噪聲。

式中n-3表示在多元線性回歸模型中使用了3個(gè)參數(shù),自由度從n降到n-3。在得到的所有標(biāo)準(zhǔn)差中,由于其統(tǒng)計(jì)特性,部分標(biāo)準(zhǔn)差會(huì)過高或過低,在統(tǒng)計(jì)曲線尾部形成拖尾。在實(shí)踐中將所有標(biāo)準(zhǔn)差排序,剔除排序前后15%的拖尾數(shù)據(jù),取剩下的標(biāo)準(zhǔn)差均值作為最佳噪聲估計(jì)。
實(shí)驗(yàn)與結(jié)果分析
為驗(yàn)證本文算法的有效性,分別在模擬高光譜圖像和真實(shí)高光譜圖像上進(jìn)行實(shí)驗(yàn),并選取LMLSD、小波法、SSDC作為對(duì)比。為了方便比較,本文使用的所有圖像大小均為256像素×256像素。
3.1 模擬實(shí)驗(yàn)
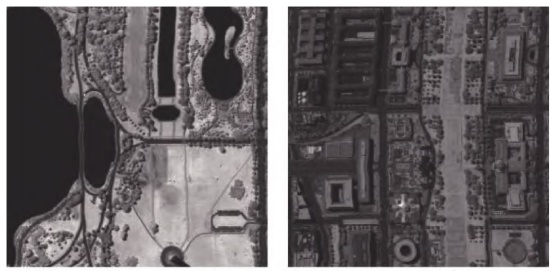
在模擬實(shí)驗(yàn)中,選用WashingtonDC圖像作為實(shí)驗(yàn)對(duì)象。它是由高光譜數(shù)字圖像采集試驗(yàn)儀HYDICE拍攝,其空間尺寸為1280像素×307像素,包含210個(gè)波段,波長(zhǎng)范圍為400~2400nm,去除水吸收波段(900~1400nm)后,剩余191個(gè)無噪的參考波段。為驗(yàn)證算法適用于不同復(fù)雜程度的圖像,截取WashingtonDC圖像中2個(gè)子區(qū)域,如圖1所示。其中圖1(a)地物以水體、均勻路面為主,圖像紋理較少,而圖1(b)以房屋、草叢為主,地物復(fù)雜,圖像紋理豐富。分別為參考圖像每個(gè)波段加入零均值的高斯噪聲,其標(biāo)準(zhǔn)差隨機(jī)選取2~30之間。
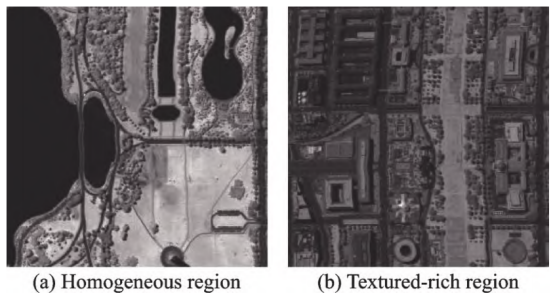
圖1 WashingtonDC圖像(第100波段)
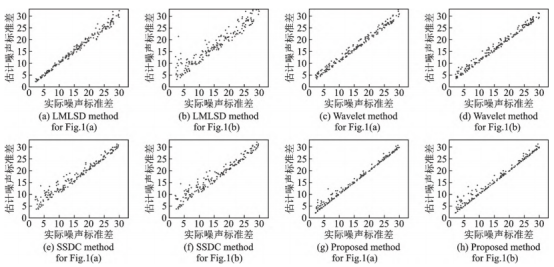
圖2 WashingtonDC圖像噪聲水平估計(jì)
噪聲估計(jì)結(jié)果如圖2所示,將真實(shí)噪聲標(biāo)準(zhǔn)差作為橫坐標(biāo),估計(jì)噪聲標(biāo)準(zhǔn)差作為縱坐標(biāo),數(shù)據(jù)點(diǎn)越集中于直線y=x,估計(jì)結(jié)果越準(zhǔn)確。
為進(jìn)一步研究算法的可靠性,將本文算法與同樣基于多元線性回歸去相關(guān)的SSDC算法相比較。圖3給出了SSDC算法和本文算法所得殘差圖。
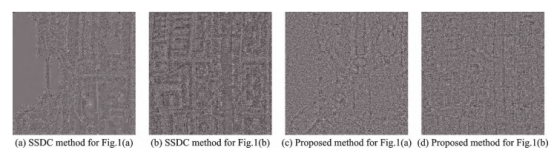
圖3 WashingtonDC圖像殘差圖(第81波段)
3.2 真實(shí)數(shù)據(jù)實(shí)驗(yàn)
在真實(shí)數(shù)據(jù)實(shí)驗(yàn)部分,選取由HYDICE傳感器獲取的Urban數(shù)據(jù)集,其空間尺寸為307像素×307像素,包含210個(gè)波段,波長(zhǎng)范圍為400~2500nm。截取第100~210波段范圍,覆蓋1400~2500nm區(qū)間。為了驗(yàn)證算法在不同復(fù)雜程度圖像中的穩(wěn)定性,截取Urban圖像中2個(gè)子區(qū)域,如圖5所示。在圖5(a)所示區(qū)域中,圖像紋理較少,而圖5(b)所示圖像紋理豐富。
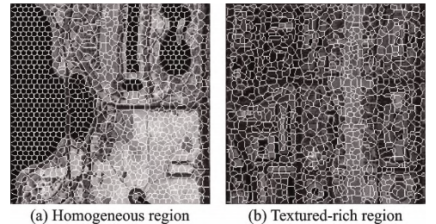
圖4 WashingtonDC圖像超像素分割結(jié)果
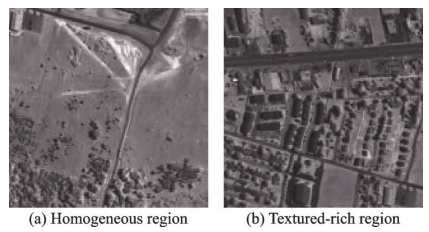
圖5 Urban圖像(第100波段)
在本實(shí)驗(yàn)中,選取SSDC算法作為對(duì)比方法,得到如圖6所示結(jié)果。這2幅子圖截取于同一幅圖像,因此它們的噪聲水平應(yīng)相同,即在圖6中對(duì)圖5(a)和圖5(b)兩幅子圖的噪聲估計(jì)結(jié)果曲線應(yīng)一致。但是,SSDC在某些波段范圍對(duì)兩幅子圖的噪聲估計(jì)出現(xiàn)了不一致的結(jié)果,這主要是由于不同地物在這些波段范圍有著不同的光譜相關(guān)性。而在本文方法中,這些現(xiàn)象并未出現(xiàn),因此相較于SSDC,本文方法不易受多種復(fù)雜地物場(chǎng)景的影響,能獲得更穩(wěn)定的噪聲估計(jì)結(jié)果。
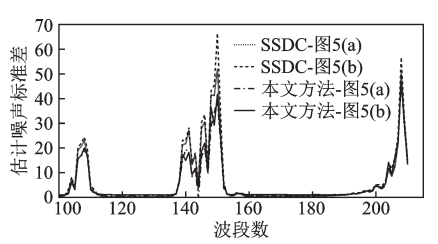
圖6 Urban圖像噪聲水平估計(jì)
結(jié)束語
在高光譜圖像噪聲估計(jì)中,容易受到輸入噪聲以及地物復(fù)雜程度的影響,對(duì)噪聲的估計(jì)穩(wěn)定性較差。本文利用高光譜圖像波段間的強(qiáng)相關(guān)性,結(jié)合多元線性回歸去相關(guān)以及超像素分割,構(gòu)造了一種超像素分割的高光譜圖像噪聲估計(jì)方法。不同于SSDC方法,本文方法在劃分的同質(zhì)區(qū)域內(nèi)去除光譜相關(guān)性,因此對(duì)空間特征的敏感性較低。在模擬實(shí)驗(yàn)中,由SSDC計(jì)算的噪聲估計(jì)值平均誤差為1.9265和2.1810,而由本文算法所獲得的噪聲估計(jì)值平均誤差為0.5108和0.7289,分別下降了75.39%和66.58%。通過模擬實(shí)驗(yàn)和真實(shí)數(shù)據(jù)實(shí)驗(yàn),表明本文方法在處理不同噪聲水平和不同地物復(fù)雜度的圖像時(shí),相較于其他方法,具有更精確的估計(jì)結(jié)果以及更好的穩(wěn)定性,從而實(shí)現(xiàn)對(duì)高光譜圖像各波段質(zhì)量的準(zhǔn)確評(píng)價(jià),精確識(shí)別出被噪聲淹沒的波段并予以剔除,提高后續(xù)分類、識(shí)別、降維等工作的精度。隨著高光譜成像設(shè)備的發(fā)展,已經(jīng)證實(shí)在高光譜圖像中也可能存在不可忽略的乘性噪聲,研究對(duì)其準(zhǔn)確估計(jì)的方法,將是下一步工作重點(diǎn)。
推薦:
便攜式地物光譜儀iSpecField-NIR/WNIR
專門用于野外遙感測(cè)量、土壤環(huán)境、礦物地質(zhì)勘探等領(lǐng)域的最新明星產(chǎn)品,由于其操作靈活、便攜方便、光譜測(cè)試速度快、光譜數(shù)據(jù)準(zhǔn)確是一款真正意義上便攜式地物光譜儀。

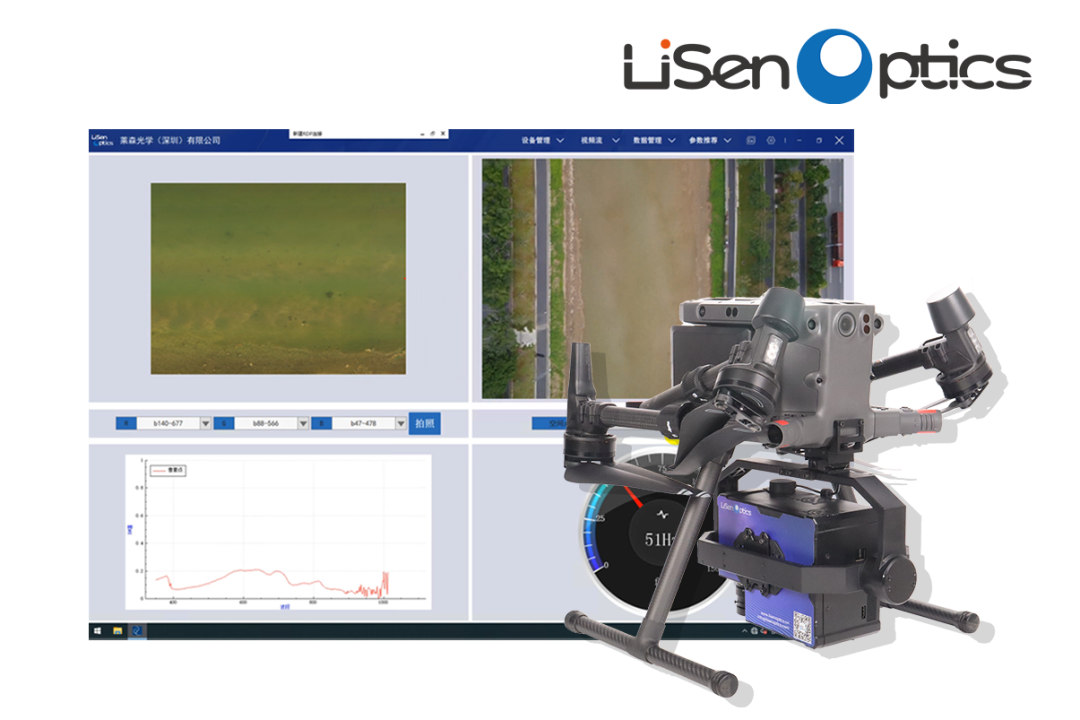
無人機(jī)機(jī)載高光譜成像系統(tǒng)iSpecHyper-VM100
一款基于小型多旋翼無人機(jī)機(jī)載高光譜成像系統(tǒng),該系統(tǒng)由高光譜成像相機(jī)、穩(wěn)定云臺(tái)、機(jī)載控制與數(shù)據(jù)采集模塊、機(jī)載供電模塊等部分組成。無人機(jī)機(jī)載高光譜成像系統(tǒng)通過獨(dú)特的內(nèi)置式或外部掃描和穩(wěn)定控制,有效地解決了在微型無人機(jī)搭載推掃式高光譜照相機(jī)時(shí),由于振動(dòng)引起的圖像質(zhì)量較差的問題,并具備較高的光譜分辨率和良好的成像性能。

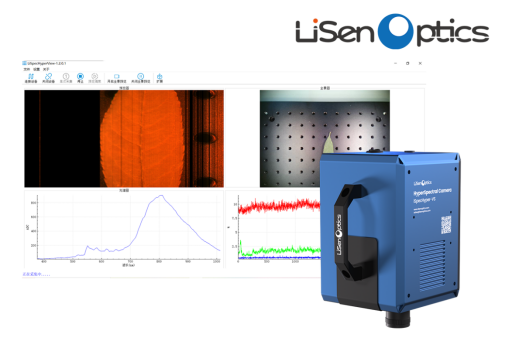
便攜式高光譜成像系統(tǒng)iSpecHyper-VS1000
專門用于公安刑偵、物證鑒定、醫(yī)學(xué)醫(yī)療、精準(zhǔn)農(nóng)業(yè)、礦物地質(zhì)勘探等領(lǐng)域的最新產(chǎn)品,主要優(yōu)勢(shì)具有體積小、幀率高、高光譜分辨率高、高像質(zhì)等性價(jià)比特點(diǎn)采用了透射光柵內(nèi)推掃原理高光譜成像,系統(tǒng)集成高性能數(shù)據(jù)采集與分析處理系統(tǒng),高速USB3.0接口傳輸,全靶面高成像質(zhì)量光學(xué)設(shè)計(jì),物鏡接口為標(biāo)準(zhǔn)C-Mount,可根據(jù)用戶需求更換物鏡。

審核編輯黃宇
-
光譜儀
+關(guān)注
關(guān)注
2文章
947瀏覽量
30710 -
成像系統(tǒng)
+關(guān)注
關(guān)注
2文章
194瀏覽量
13911
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
帶你走進(jìn)高光譜工業(yè)相機(jī)
海譜納米首次實(shí)現(xiàn)基于MEMS技術(shù)的短波紅外高光譜相機(jī)的量產(chǎn)

高光譜成像儀在農(nóng)業(yè)上的應(yīng)用

什么是高光譜相機(jī)?高光譜相機(jī)有什么用?

高光譜相機(jī)檢測(cè)手機(jī)背板顏色均勻性
高光譜成像系統(tǒng):高光譜遙感圖像的光譜混合模型
高光譜成像儀的數(shù)據(jù)怎么看

?高光譜成像系統(tǒng):湖南省典型植被光譜信息獲取與特征分析
高光譜成像技術(shù):從原理到應(yīng)用的全面指南
高光譜成像系統(tǒng):光譜成像技術(shù)在海域目標(biāo)探測(cè)中的應(yīng)用
避免高光譜成像數(shù)據(jù)中的光譜混疊問題
友思特分享 | 清晰光譜空間:全自動(dòng)可調(diào)波長(zhǎng)系統(tǒng)的高光譜成像優(yōu)勢(shì)
選擇多光譜or高光譜工業(yè)相機(jī)?

如何區(qū)分光譜、多光譜和高光譜






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論