") 步進(jìn)電機(jī)轉(zhuǎn)速測(cè)量轉(zhuǎn)換器
步進(jìn)電機(jī)轉(zhuǎn)速測(cè)量轉(zhuǎn)換器
步進(jìn)電動(dòng)機(jī)的使用大致分為位置控制和速度控制。速度控制的速度范圍可以從低速到高速變速控制或恒速使用,但速度會(huì)發(fā)生變化。下圖顯示了速度變化率的定義。
現(xiàn)在,步進(jìn)電動(dòng)機(jī)的平均速度用ωm表示,其速度從零變?yōu)樽畲笾怠H绻麑⑵湫D(zhuǎn)Δωm,則變速率VF由以下公式定義:
這是轉(zhuǎn)速變化率的測(cè)量值,它是根據(jù)實(shí)際負(fù)載慣量由等效慣量或摩擦轉(zhuǎn)矩測(cè)得的,接近實(shí)際使用值。特別是在慣性較大時(shí),速度的變化率(也稱(chēng)為速度故障,抖動(dòng),擺動(dòng)等)也較大。因此,必須注意步進(jìn)電機(jī)的轉(zhuǎn)速范圍。速度越快,速度變化率越小。
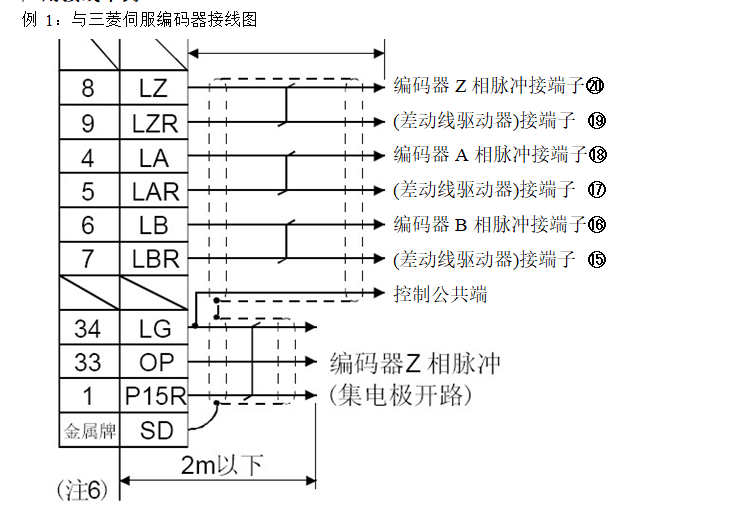
這種測(cè)量方法大致分為使用編碼器的方法和激光測(cè)量方法。使用編碼器時(shí),請(qǐng)注意編碼器與步進(jìn)電機(jī)聯(lián)軸器的軸心同心,還應(yīng)考慮編碼器慣性的影響。要計(jì)算速度變化率,請(qǐng)首先計(jì)算編碼器每單位時(shí)間的脈沖數(shù),然后計(jì)算速度變化率。代替使用激光測(cè)量方法,將光盤(pán)安裝在步進(jìn)電機(jī)上,該步進(jìn)電機(jī)反射激光束并將光反射回去。使用多普勒效應(yīng)計(jì)算速度變化。該設(shè)備是可商購(gòu)的。在此,如果不特別要求編碼器測(cè)量,則最好使用激光測(cè)量?jī)x。

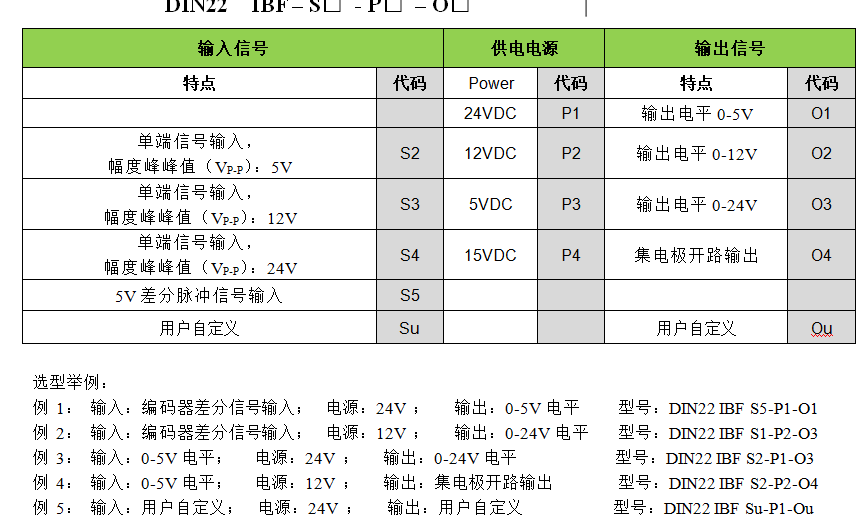
1路編碼器轉(zhuǎn)速測(cè)量或2路DI頻率測(cè)量,1路DO超速報(bào)警輸出 IBF151
產(chǎn)品特點(diǎn):
●編碼器計(jì)數(shù)轉(zhuǎn)換成標(biāo)準(zhǔn)Modbus RTU協(xié)議
●編碼轉(zhuǎn)速測(cè)量,能識(shí)別正反轉(zhuǎn),可報(bào)警輸出
●也可以設(shè)置作為2路獨(dú)立DI高速計(jì)數(shù)器
●一路DO輸出可設(shè)置為計(jì)數(shù)或頻率報(bào)警信號(hào)
●計(jì)數(shù)值支持?jǐn)嚯娮詣?dòng)保存
● DI輸入支持PNP和NPN輸入
●繼電器和機(jī)械開(kāi)關(guān)輸入時(shí)可以設(shè)置濾波時(shí)間
●通過(guò)RS-485接口可以清零和設(shè)置計(jì)數(shù)值
●可靠性高,編程方便,易于應(yīng)用
●標(biāo)準(zhǔn)DIN35導(dǎo)軌安裝,方便集中布線
●用戶(hù)可編程設(shè)置模塊地址、波特率等
典型應(yīng)用:
●編碼器脈沖信號(hào)測(cè)量與報(bào)警
●流量計(jì)脈沖計(jì)數(shù)或流量測(cè)量
●生產(chǎn)線產(chǎn)品計(jì)數(shù)
●物流包裹數(shù)量計(jì)數(shù)
●接近開(kāi)關(guān)脈沖信號(hào)測(cè)量
●編碼器信號(hào)遠(yuǎn)傳到工控機(jī)
●水表或電表脈沖計(jì)數(shù)
IBF151產(chǎn)品實(shí)現(xiàn)傳感器和主機(jī)之間的信號(hào)采集,用來(lái)解碼編碼器信號(hào)。IBF151系列產(chǎn)品可應(yīng)用在RS-485總線工業(yè)自動(dòng)化控制系統(tǒng),自動(dòng)化機(jī)床,工業(yè)機(jī)器人,三坐標(biāo)定位系統(tǒng),位移測(cè)量,行程測(cè)量,角度測(cè)量,轉(zhuǎn)速測(cè)量,流量測(cè)量,產(chǎn)品計(jì)數(shù)等等。
產(chǎn)品包括信號(hào)采集,脈沖信號(hào)捕捉,信號(hào)轉(zhuǎn)換和RS-485串行通信。每個(gè)串口最多可接255只 IBF151系列模塊,通訊方式采用ASCII碼通訊協(xié)議或MODBUS RTU通訊協(xié)議,波特率可由代碼設(shè)置,能與其他廠家的控制模塊掛在同一RS-485總線上,便于計(jì)算機(jī)編程。
IBF151系列產(chǎn)品是基于單片機(jī)的智能監(jiān)測(cè)和控制系統(tǒng),所有的用戶(hù)設(shè)定的地址,波特率,數(shù)據(jù)格式,校驗(yàn)和狀態(tài)等配置信息都儲(chǔ)存在非易失性存儲(chǔ)器EEPROM里。
IBF151系列產(chǎn)品按工業(yè)標(biāo)準(zhǔn)設(shè)計(jì)、制造,信號(hào)輸入 /輸出之間不隔離,抗干擾能力強(qiáng),可靠性高。工作溫度范圍- 45℃~+85℃。
功能簡(jiǎn)介:
IBF151遠(yuǎn)程I/O模塊,可以用來(lái)測(cè)量1路編碼器信號(hào),也可以設(shè)置作為2路獨(dú)立計(jì)數(shù)器或者DI狀態(tài)測(cè)量。
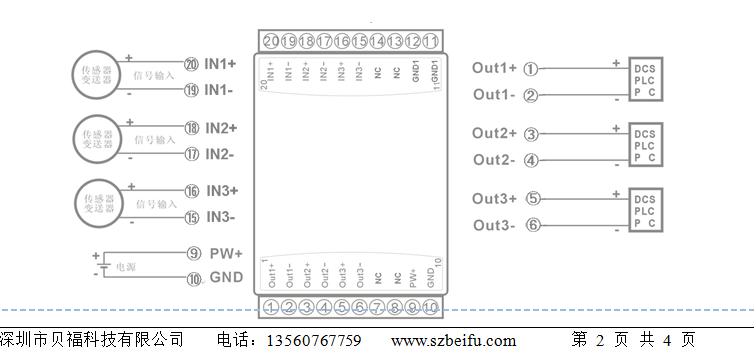
信號(hào)輸入
1路編碼器信號(hào)輸入或2路獨(dú)立計(jì)數(shù)器,可接干接點(diǎn)和濕接點(diǎn),通過(guò)命令設(shè)置輸入類(lèi)型。
信號(hào)輸出
1路DO信號(hào)輸出,輸出高電平約等于電源電壓,低電平為0V,可以直接驅(qū)動(dòng)中間繼電器,通過(guò)命令設(shè)置輸出模式。
通訊協(xié)議
通訊接口: 1路標(biāo)準(zhǔn)的RS-485通訊接口。
通訊協(xié)議:支持兩種協(xié)議,命令集定義的字符協(xié)議和MODBUS RTU通訊協(xié)議。模塊自動(dòng)識(shí)別通訊協(xié)議,能實(shí)現(xiàn)與多種品牌的PLC、RTU或計(jì)算機(jī)監(jiān)控系統(tǒng)進(jìn)行網(wǎng)絡(luò)通訊。
數(shù)據(jù)格式:10位。1位起始位,8位數(shù)據(jù)位,1位停止位。無(wú)校驗(yàn)。
通訊地址(0~255)和波特率(2400、4800、9600、19200、38400、57600、115200bps)均可設(shè)定;通訊網(wǎng)絡(luò)最長(zhǎng)距離可達(dá)1200米,通過(guò)雙絞屏蔽電纜連接。
通訊接口高抗干擾設(shè)計(jì),±15KV ESD保護(hù),通信響應(yīng)時(shí)間小于100mS。
抗干擾
可根據(jù)需要設(shè)置校驗(yàn)和。模塊內(nèi)部有瞬態(tài)抑制二極管,可以有效抑制各種浪涌脈沖,保護(hù)模塊,內(nèi)部的數(shù)字濾波,也可以很好的抑制來(lái)自電網(wǎng)的工頻干擾。

審核編輯黃宇
-
轉(zhuǎn)換器
+關(guān)注
關(guān)注
27文章
8627瀏覽量
146869 -
步進(jìn)電機(jī)
+關(guān)注
關(guān)注
150文章
3095瀏覽量
147347
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
步進(jìn)電機(jī)轉(zhuǎn)速怎么控制高低
步進(jìn)電機(jī)轉(zhuǎn)速一般多少?

電動(dòng)執(zhí)行器怎么控制電機(jī)轉(zhuǎn)速
步進(jìn)電機(jī)控制器電路圖 步進(jìn)電機(jī)控制器的分類(lèi)及其特點(diǎn)

步進(jìn)電機(jī)驅(qū)動(dòng)器有哪些參數(shù)需要設(shè)置
如何正確選擇步進(jìn)電機(jī)驅(qū)動(dòng)器
為什么步進(jìn)電機(jī)要加驅(qū)動(dòng)器
STM32可以通過(guò)控制脈沖控制步進(jìn)電機(jī)達(dá)到所需的固定轉(zhuǎn)速嗎?
電源電壓是影響步進(jìn)電機(jī)轉(zhuǎn)速的重要因素之
步進(jìn)電機(jī)控制器電路圖分享





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論