 使用一維位置傳感器測量第二個軸
使用一維位置傳感器測量第二個軸
如何測量二維
電感式位置傳感器可以精確測量金屬目標的旋轉或線性位置。與其他磁場傳感器不同,它們不需要磁性目標。相反,它們使用替代磁場在金屬目標中感應磁場,然后能夠精確測量目標的位置。這個目標可以是任何金屬,但最好的目標是銅、鋁或不銹鋼。雖然它們非常適合測量線性距離和旋轉角度,但有時在應用中需要多個維度。為了進行精確測量,可以添加第二個電感式位置傳感器來測量這個額外的軸,但第二個軸并不總是需要相同水平的精度,例如,具有按鈕功能的旋鈕或具有手動換檔功能的汽車換檔器,通過將齒輪向左或向右拉動。在任一情況下,具有一定余量的閾值都是可以接受的。
使用我們的電感式位置傳感器LX3302A,您可以添加第二個軸的測量。在描述如何完成之后,我們將介紹在您的兩軸傳感器設計中實現它的步驟。
我們的電感式位置傳感器如何測量第二個維度
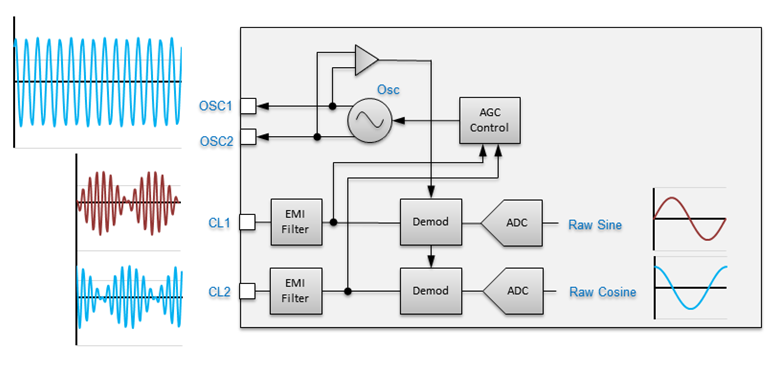
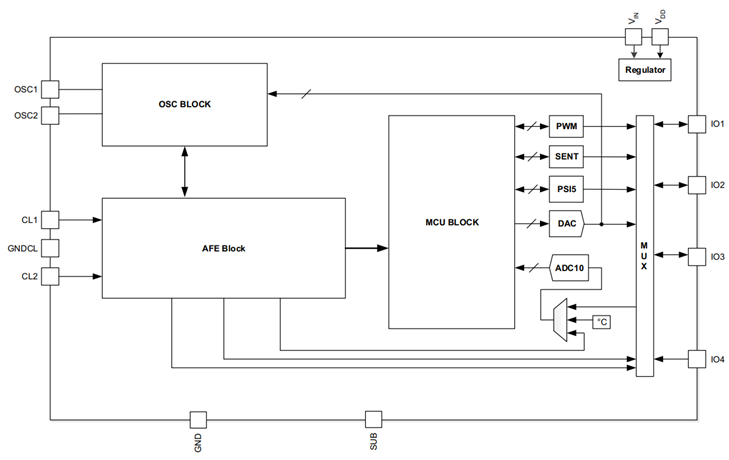
Microchip獨特地使用帶有電感式傳感器的快速連續自動增益控制(AGC)電路,有助于提供準確的測量,并實現第二軸測量。下圖顯示了電感式位置傳感器的框圖和AGC的操作。磁場由 OSC1 和 OSC2 信號引入金屬目標。接收信號CL1和CL2被解調以表示Raw Sin(x)和Raw Cos(x),其中x表示角度或位置。這些信號的幅度由固定輸入范圍的模數轉換器(ADC)讀取,以將信號轉換為數字域。然后,微控制器可以使用sin(x)和Cos(x)值確定精確的角度或位置x,以計算arctan(x)以及其他校準算法。
為了最大限度地提高這些ADC讀數的分辨率,調整AGC以確保Sin(x)和Cos(x)的峰值在不同的信號強度下保持在ADC的最大范圍內。它通過控制 OSC1 和 OSC2 振幅來實現這一點
使用以下三角恒等式作為控制律:
其中x表示和旋轉角度或測量的距離。AGC(x) 然后由以下公式計算:
其中AGC(x)是每個角度或位置x處的增益,K是由電路定義的恒定半徑。控制律和框圖說明,隨著目標距離的調整,接收到的信號CL1和CL2不會增加或減少,因為AGC(x)會自動變化以保持sin(x)和cos(x)信號的峰值恒定,以便ADC讀取。我們將使用此AGC(x)增益來提供僅使用一個電感式位置傳感器集成電路(IC)的第二個測量軸。
傳感器目標距離變化增益
如果沒有AGC,CL1和CL2的接收信號強度會隨著氣隙而變化。從概念上講,由于傳感器和金屬目標之間的氣隙較大,OSC1和OSC2產生的磁場不會在金屬目標中感應出那么多的磁場,CL1和CL2將接收較少的信號。然而,通過實施這種連續AGC,我們現在可以直接測量傳感器和目標之間的氣隙或距離。只要可以調整傳感器機械設計以利用此氣隙,就可以使用第二個軸(即z軸)。下一個問題是:我們如何衡量這種收益?
用于救援的 10 位 ADC
Microchip的LX3302A、LX3301A和LX34211具有10位ADC以提供動態校準。它通過測量振蕩器電壓的幅度(代表增益)進行動態校準,并用它來補償不同AGC增益下非理想傳感器的失調電壓。傳感器偏移定義為Sin(x)或Cos(x)信號中不存在的不需要的恒定電壓的添加:
LX3302A具有特殊的單邊沿半字節傳輸(SENT)模式,可傳輸此ADC 10位增益信息以及主軸位置信息。
使用更多 SENT 通道帶寬
LX3302A是一款多功能IC,具有四種不同的方法與外部主機微控制器或計算機接口。它可以輸出模擬,PWM,SENT或PSI5值的傳感器輸出,如框圖吹所示。您還可以看到與測量振蕩器電壓的AFE模塊的10位ADC連接。
LX3302A的單邊半字節傳輸(SENT)是輸出接口之一,是一種可靠的抗噪聲通信方法。SENT 協議有兩個快速 12 位通道和一個用于傳輸信息的慢速 12 位通道。LX3302A SENT 模式 (FCM = 0100) 利用第二個快速通道發送此 10 位 ADC 振蕩器電壓,同時還通過第一個快速通道傳輸精確的位置信息。10位(0-1024)ADC值通過第二個快速通道傳輸。
然后,主機微控制器可以使用此信息來確定AGC的增益和氣隙,并測量第二個運動軸。LX3302A的應用筆記展示了即使微控制器沒有本機SENT外設,如何使用微控制器讀取此SENT信息。總之,關于我們之前的示例,帶有按鈕指示器的旋鈕可以使用氣隙變化來檢測用戶何時按下旋鈕。
實際考慮
精確的傳感器將具有非常小的傳感器偏移(即Offsin= Offcos = 0),但有時很難實現。使用動態校準,這些傳感器也可以是準確的,但振蕩器電壓最終會在測量范圍內移動。這些傳感器也可以使用此AGC增益來檢測次軸運動,但可能需要利用位置傳感器信息。在一個極端的例子中,下面的線性傳感器有一個異常大的偏移,從測量范圍內的振蕩器電壓可以看出。測量了三種不同的氣隙。
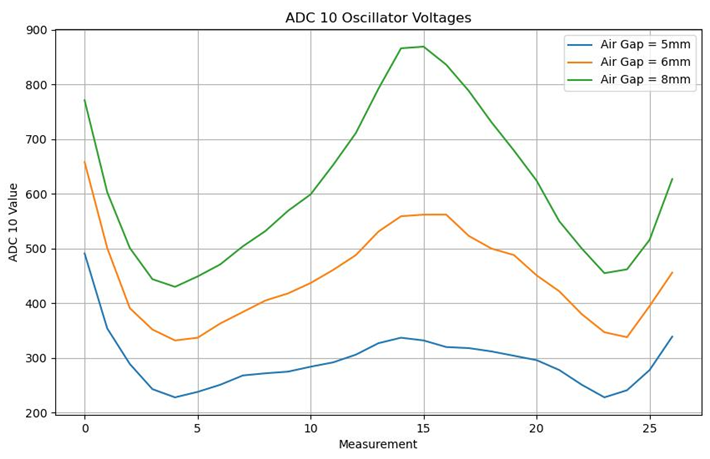
圖2.具有大失調電壓的傳感器
即使在這些條件下,使用位置信息也可以檢測到氣隙。如果目標是檢測氣隙何時下降到6.5 mm以下并具有一定的裕量,則可以選擇位置上的10位ADC值,該值大約適合6 mm氣隙曲線。例如,在測量位置5,如果ADC 10位值小于340,則氣隙小于6 mm。在位置15處,ADC 10位值減去550時,將檢測到相同的6 mm氣隙。
使用主機微控制器,以下氣隙閾值曲線可以作為這種極端條件的示例,即使用具有大量偏移的傳感器實現此次軸測量。
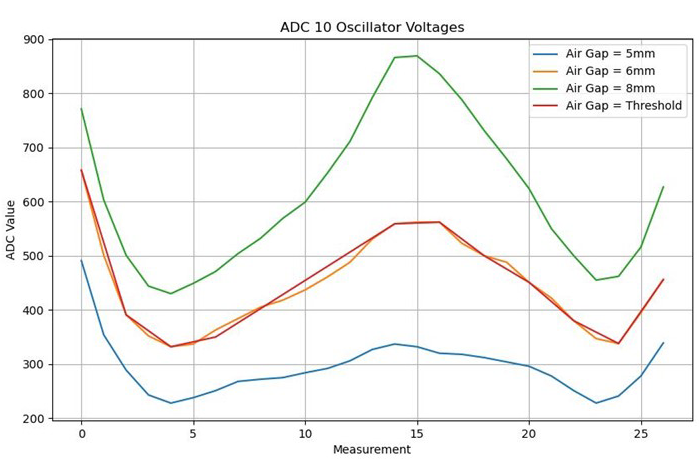
圖3.對輔助軸閾值使用可變閾值
使用上述方法,您可以使用Microchip電感式位置傳感器的快速連續調整AGC回路來記錄第二個測量軸。
審核編輯:郭婷
-
微控制器
+關注
關注
48文章
7336瀏覽量
150107 -
傳感器
+關注
關注
2541文章
49961瀏覽量
747516 -
AGC
+關注
關注
0文章
158瀏覽量
51478
發布評論請先 登錄
相關推薦







 工商網監
工商網監
評論