") 六自由度視覺(jué)定位
六自由度視覺(jué)定位
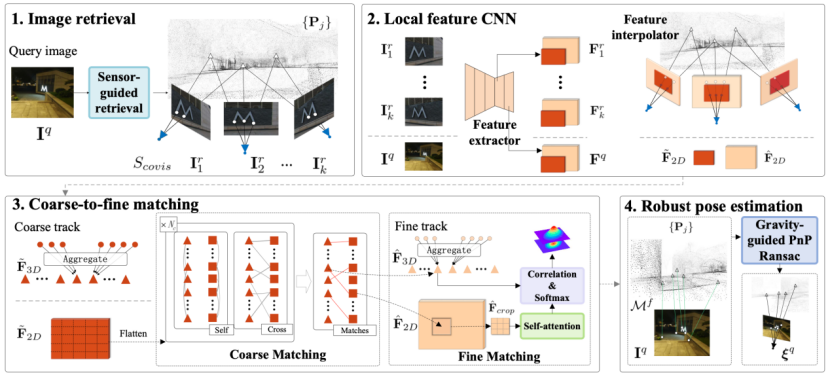
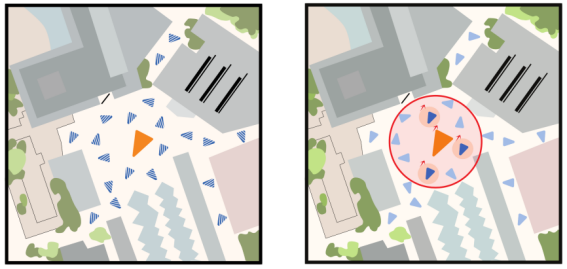
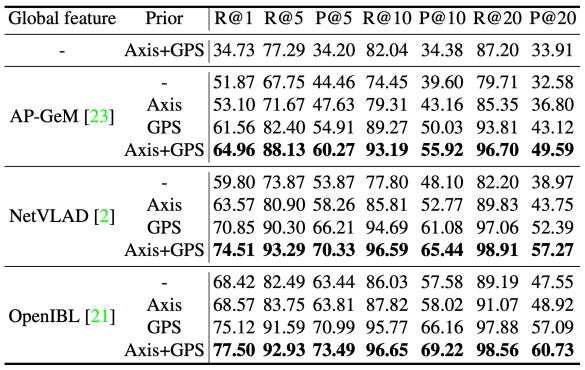
針對(duì)在時(shí)變的室外環(huán)境中難以視覺(jué)定位的問(wèn)題,博士生顏深創(chuàng)新性地提出一種解決方案 SensLoc。SensLoc 利用移動(dòng)設(shè)備內(nèi)置的傳感器數(shù)據(jù),如 GPS、指南針和重力傳感器,為視覺(jué)定位提供有效的初始位姿和約束條件,從而縮小圖像檢索和位姿估計(jì)的搜索空間。
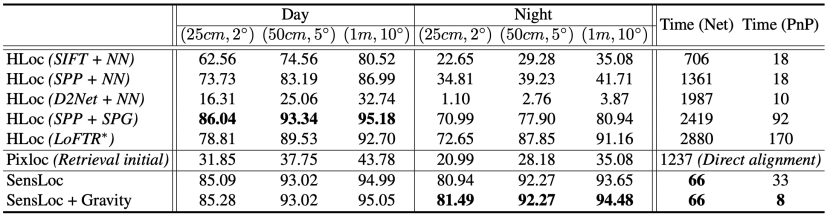
此外,SensLoc 還設(shè)計(jì)了一個(gè)直接的 2D-3D 匹配網(wǎng)絡(luò),以高效地建立查詢(xún)圖像與三維場(chǎng)景之間的對(duì)應(yīng)關(guān)系,避免了現(xiàn)有系統(tǒng)中需要多次進(jìn)行 2D-2D 匹配的低效方案。為了驗(yàn)證 SensLoc 的有效性,論文還構(gòu)建了一個(gè)新的數(shù)據(jù)集,該數(shù)據(jù)集包含了多種移動(dòng)傳感器數(shù)據(jù)和顯著的場(chǎng)景外觀變化,并開(kāi)發(fā)了一個(gè)系統(tǒng)來(lái)獲取查詢(xún)圖像的真實(shí)位姿。大量的實(shí)驗(yàn)表明 SensLoc 可以在時(shí)變的室外環(huán)境中實(shí)現(xiàn)準(zhǔn)確、魯棒且高效的視覺(jué)定位。
 ,圖像檢索任務(wù)需要在參考圖像集
,圖像檢索任務(wù)需要在參考圖像集 里找到與查詢(xún)圖有共視關(guān)系的圖像子集:
里找到與查詢(xún)圖有共視關(guān)系的圖像子集:
 ,其位置分量來(lái)源于 GPS,旋轉(zhuǎn)分量來(lái)自于重力計(jì)和指南針?lè)较虻募伞?/span>查詢(xún)圖像只需要在圖像子集
,其位置分量來(lái)源于 GPS,旋轉(zhuǎn)分量來(lái)自于重力計(jì)和指南針?lè)较虻募伞?/span>查詢(xún)圖像只需要在圖像子集 中檢索共視鄰居
中檢索共視鄰居 ?
? 表示經(jīng)緯度的 x-y 坐標(biāo),
表示經(jīng)緯度的 x-y 坐標(biāo), 表示相機(jī)的主軸方向。
2 直接的 2D-3D 匹配
給定查詢(xún)圖
表示相機(jī)的主軸方向。
2 直接的 2D-3D 匹配
給定查詢(xún)圖 和共視鄰居
和共視鄰居 ,2D-3D 匹配任務(wù)需要建立像素點(diǎn)與
,2D-3D 匹配任務(wù)需要建立像素點(diǎn)與 能觀察到的局部點(diǎn)云
能觀察到的局部點(diǎn)云 之間的 2D-3D 對(duì)應(yīng)關(guān)系。
具體而言,首先使用多層級(jí)網(wǎng)絡(luò)提取查詢(xún)圖
之間的 2D-3D 對(duì)應(yīng)關(guān)系。
具體而言,首先使用多層級(jí)網(wǎng)絡(luò)提取查詢(xún)圖 ?和參考圖
?和參考圖 的粗(用
的粗(用 表示)、細(xì)(用
表示)、細(xì)(用 表示)粒度特征,然后將局部點(diǎn)云
表示)粒度特征,然后將局部點(diǎn)云 投影在參考特征圖上并進(jìn)行插值、平均,得到點(diǎn)云特征。
然后,使用帶注意力機(jī)制的網(wǎng)絡(luò)匹配查詢(xún)圖與局部點(diǎn)云的粗粒度特征,確定點(diǎn)云是否為查詢(xún)圖像所見(jiàn),并初步確定它在圖像上的位置。使用注意力機(jī)制變換后的粗粒度圖像和點(diǎn)云特征分別為
投影在參考特征圖上并進(jìn)行插值、平均,得到點(diǎn)云特征。
然后,使用帶注意力機(jī)制的網(wǎng)絡(luò)匹配查詢(xún)圖與局部點(diǎn)云的粗粒度特征,確定點(diǎn)云是否為查詢(xún)圖像所見(jiàn),并初步確定它在圖像上的位置。使用注意力機(jī)制變換后的粗粒度圖像和點(diǎn)云特征分別為 ,概率匹配矩陣
,概率匹配矩陣 表示為
表示為
 表示為
表示為
 ,通過(guò)將點(diǎn)云的細(xì)粒度特征
,通過(guò)將點(diǎn)云的細(xì)粒度特征 與在
與在 附近裁剪出細(xì)粒度窗口特征
附近裁剪出細(xì)粒度窗口特征 進(jìn)行點(diǎn)乘,得到匹配概率并計(jì)算二維位置期望,獲取查詢(xún)圖像的亞像素
進(jìn)行點(diǎn)乘,得到匹配概率并計(jì)算二維位置期望,獲取查詢(xún)圖像的亞像素 與局部點(diǎn)云的精確對(duì)應(yīng)關(guān)系。
3 基于重力方向的 PnP RANSAC
給定 2D-3D 的對(duì)應(yīng)關(guān)系,之前的工作通常采用 PnP RANSAC 算法求解相機(jī)的六自由度位姿。論文在 PnP RANSAC 迭代中插入一個(gè)簡(jiǎn)單有效的驗(yàn)證模塊,以保證重力方向的正確性。具體地,對(duì)于 RANSAC 迭代生成的位姿假設(shè)
與局部點(diǎn)云的精確對(duì)應(yīng)關(guān)系。
3 基于重力方向的 PnP RANSAC
給定 2D-3D 的對(duì)應(yīng)關(guān)系,之前的工作通常采用 PnP RANSAC 算法求解相機(jī)的六自由度位姿。論文在 PnP RANSAC 迭代中插入一個(gè)簡(jiǎn)單有效的驗(yàn)證模塊,以保證重力方向的正確性。具體地,對(duì)于 RANSAC 迭代生成的位姿假設(shè) ,其與傳感器位姿
,其與傳感器位姿 在重力方向
在重力方向 上差值為
上差值為
 預(yù)先過(guò)濾掉大部分錯(cuò)誤位姿,實(shí)現(xiàn)更高效、魯棒的位姿解算。
數(shù)據(jù)集
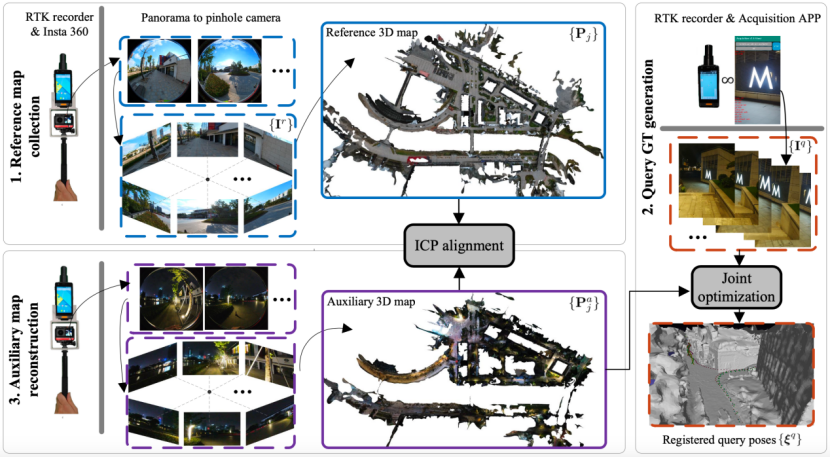
論文構(gòu)建了一個(gè)新的數(shù)據(jù)集,用于驗(yàn)證所提方法的有效性。該數(shù)據(jù)集包括一個(gè)城市公園(約 31,250 平方米),包含植被、河流、建筑和人行道。作為一個(gè)公共區(qū)域,其不可避免地會(huì)經(jīng)歷各種場(chǎng)景的變化,例如不同光照、季節(jié)、天氣,運(yùn)動(dòng)的行人、車(chē)輛,甚至新的基礎(chǔ)設(shè)施建設(shè)。數(shù)據(jù)集的構(gòu)建流程如下圖所示。
預(yù)先過(guò)濾掉大部分錯(cuò)誤位姿,實(shí)現(xiàn)更高效、魯棒的位姿解算。
數(shù)據(jù)集
論文構(gòu)建了一個(gè)新的數(shù)據(jù)集,用于驗(yàn)證所提方法的有效性。該數(shù)據(jù)集包括一個(gè)城市公園(約 31,250 平方米),包含植被、河流、建筑和人行道。作為一個(gè)公共區(qū)域,其不可避免地會(huì)經(jīng)歷各種場(chǎng)景的變化,例如不同光照、季節(jié)、天氣,運(yùn)動(dòng)的行人、車(chē)輛,甚至新的基礎(chǔ)設(shè)施建設(shè)。數(shù)據(jù)集的構(gòu)建流程如下圖所示。
 。相較于單目相機(jī),全景相機(jī)具有更高的采集效率。將 7,958 張全景圖像切分并轉(zhuǎn)換為針孔模型后,該數(shù)據(jù)集包括 47,780 張參考圖像。為了確定模型尺度并與地理坐標(biāo)系保持一致,該研究預(yù)先在全景相機(jī)上綁定了一個(gè) RTK 記錄儀,以記錄絕對(duì)地理坐標(biāo)。
2 查詢(xún)圖像采集
在三維參考地圖構(gòu)建完成半年后,該研究在相同地址中行走,并開(kāi)發(fā)了一款安卓應(yīng)用程序 Acquisition Application(采集 APP),使用華為 P40 pro 和小米 Mix 3 手機(jī)拍攝視頻以采集查詢(xún)圖像,并通過(guò)綁定 RTK 記錄儀獲取拍攝時(shí)的地理位置信息。該采集 APP 能夠同時(shí)記錄手機(jī)內(nèi)置傳感器的數(shù)據(jù),包括 IMU、重力計(jì)、指南針、藍(lán)牙、WiFi 和 GPS。拍攝視頻與所有傳感器均經(jīng)過(guò)硬件同步和細(xì)致校準(zhǔn)。由于論文關(guān)注于單圖的視覺(jué)定位,因此視頻序列會(huì)進(jìn)行采樣以生成不連續(xù)的單張圖像。
3 三維輔助地圖構(gòu)建與偽位姿真值生成
由于查詢(xún)圖像與三維參考地圖之間存在跨時(shí)節(jié)的變化,因此基于半年前構(gòu)建的三維參考地圖生成查詢(xún)圖像的偽位姿真值較為困難。論文提出在采集查詢(xún)圖像時(shí),同時(shí)構(gòu)建一個(gè)三維輔助地圖
。相較于單目相機(jī),全景相機(jī)具有更高的采集效率。將 7,958 張全景圖像切分并轉(zhuǎn)換為針孔模型后,該數(shù)據(jù)集包括 47,780 張參考圖像。為了確定模型尺度并與地理坐標(biāo)系保持一致,該研究預(yù)先在全景相機(jī)上綁定了一個(gè) RTK 記錄儀,以記錄絕對(duì)地理坐標(biāo)。
2 查詢(xún)圖像采集
在三維參考地圖構(gòu)建完成半年后,該研究在相同地址中行走,并開(kāi)發(fā)了一款安卓應(yīng)用程序 Acquisition Application(采集 APP),使用華為 P40 pro 和小米 Mix 3 手機(jī)拍攝視頻以采集查詢(xún)圖像,并通過(guò)綁定 RTK 記錄儀獲取拍攝時(shí)的地理位置信息。該采集 APP 能夠同時(shí)記錄手機(jī)內(nèi)置傳感器的數(shù)據(jù),包括 IMU、重力計(jì)、指南針、藍(lán)牙、WiFi 和 GPS。拍攝視頻與所有傳感器均經(jīng)過(guò)硬件同步和細(xì)致校準(zhǔn)。由于論文關(guān)注于單圖的視覺(jué)定位,因此視頻序列會(huì)進(jìn)行采樣以生成不連續(xù)的單張圖像。
3 三維輔助地圖構(gòu)建與偽位姿真值生成
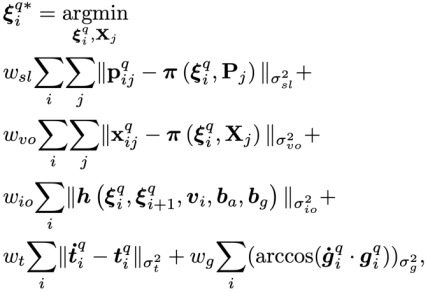
由于查詢(xún)圖像與三維參考地圖之間存在跨時(shí)節(jié)的變化,因此基于半年前構(gòu)建的三維參考地圖生成查詢(xún)圖像的偽位姿真值較為困難。論文提出在采集查詢(xún)圖像時(shí),同時(shí)構(gòu)建一個(gè)三維輔助地圖 。三維輔助地圖的構(gòu)建方法與三維參考地圖類(lèi)似,同樣使用全景相機(jī)和 RTK 記錄儀進(jìn)行采集,并采用 ICP 技術(shù)進(jìn)行對(duì)齊。基于三維輔助地圖生成查詢(xún)圖像的偽真值等同于基于三維參考地圖生成的偽真值。論文設(shè)計(jì)了一套聯(lián)合優(yōu)化方法生成偽真值,優(yōu)化項(xiàng)包括:1)圖像自定位約束;2)序列圖像的相對(duì)位姿約束;3)IMU 的運(yùn)動(dòng)約束;4)其他先驗(yàn)約束,如重力方向和 RTK 位置。
。三維輔助地圖的構(gòu)建方法與三維參考地圖類(lèi)似,同樣使用全景相機(jī)和 RTK 記錄儀進(jìn)行采集,并采用 ICP 技術(shù)進(jìn)行對(duì)齊。基于三維輔助地圖生成查詢(xún)圖像的偽真值等同于基于三維參考地圖生成的偽真值。論文設(shè)計(jì)了一套聯(lián)合優(yōu)化方法生成偽真值,優(yōu)化項(xiàng)包括:1)圖像自定位約束;2)序列圖像的相對(duì)位姿約束;3)IMU 的運(yùn)動(dòng)約束;4)其他先驗(yàn)約束,如重力方向和 RTK 位置。
,圖像檢索任務(wù)需要在參考圖像集里找到與查詢(xún)圖有共視關(guān)系的圖像子集:

,其位置分量來(lái)源于 GPS,旋轉(zhuǎn)分量來(lái)自于重力計(jì)和指南針?lè)较虻募伞?/span>查詢(xún)圖像只需要在圖像子集中檢索共視鄰居
?

表示經(jīng)緯度的 x-y 坐標(biāo),表示相機(jī)的主軸方向。
2 直接的 2D-3D 匹配
給定查詢(xún)圖和共視鄰居 ,2D-3D 匹配任務(wù)需要建立像素點(diǎn)與能觀察到的局部點(diǎn)云之間的 2D-3D 對(duì)應(yīng)關(guān)系。
具體而言,首先使用多層級(jí)網(wǎng)絡(luò)提取查詢(xún)圖?和參考圖的粗(用表示)、細(xì)(用表示)粒度特征,然后將局部點(diǎn)云投影在參考特征圖上并進(jìn)行插值、平均,得到點(diǎn)云特征。
然后,使用帶注意力機(jī)制的網(wǎng)絡(luò)匹配查詢(xún)圖與局部點(diǎn)云的粗粒度特征,確定點(diǎn)云是否為查詢(xún)圖像所見(jiàn),并初步確定它在圖像上的位置。使用注意力機(jī)制變換后的粗粒度圖像和點(diǎn)云特征分別為,概率匹配矩陣表示為

表示為

 為互最近鄰,
為互最近鄰, 為預(yù)設(shè)閾值。
為預(yù)設(shè)閾值。
最后,對(duì)于每一個(gè)粗匹配對(duì)應(yīng)的二維像素和三維點(diǎn)云
,通過(guò)將點(diǎn)云的細(xì)粒度特征與在附近裁剪出細(xì)粒度窗口特征進(jìn)行點(diǎn)乘,得到匹配概率并計(jì)算二維位置期望,獲取查詢(xún)圖像的亞像素 與局部點(diǎn)云的精確對(duì)應(yīng)關(guān)系。
3 基于重力方向的 PnP RANSAC
給定 2D-3D 的對(duì)應(yīng)關(guān)系,之前的工作通常采用 PnP RANSAC 算法求解相機(jī)的六自由度位姿。論文在 PnP RANSAC 迭代中插入一個(gè)簡(jiǎn)單有效的驗(yàn)證模塊,以保證重力方向的正確性。具體地,對(duì)于 RANSAC 迭代生成的位姿假設(shè),其與傳感器位姿在重力方向上差值為

預(yù)先過(guò)濾掉大部分錯(cuò)誤位姿,實(shí)現(xiàn)更高效、魯棒的位姿解算。
數(shù)據(jù)集
論文構(gòu)建了一個(gè)新的數(shù)據(jù)集,用于驗(yàn)證所提方法的有效性。該數(shù)據(jù)集包括一個(gè)城市公園(約 31,250 平方米),包含植被、河流、建筑和人行道。作為一個(gè)公共區(qū)域,其不可避免地會(huì)經(jīng)歷各種場(chǎng)景的變化,例如不同光照、季節(jié)、天氣,運(yùn)動(dòng)的行人、車(chē)輛,甚至新的基礎(chǔ)設(shè)施建設(shè)。數(shù)據(jù)集的構(gòu)建流程如下圖所示。
。相較于單目相機(jī),全景相機(jī)具有更高的采集效率。將 7,958 張全景圖像切分并轉(zhuǎn)換為針孔模型后,該數(shù)據(jù)集包括 47,780 張參考圖像。為了確定模型尺度并與地理坐標(biāo)系保持一致,該研究預(yù)先在全景相機(jī)上綁定了一個(gè) RTK 記錄儀,以記錄絕對(duì)地理坐標(biāo)。
2 查詢(xún)圖像采集
在三維參考地圖構(gòu)建完成半年后,該研究在相同地址中行走,并開(kāi)發(fā)了一款安卓應(yīng)用程序 Acquisition Application(采集 APP),使用華為 P40 pro 和小米 Mix 3 手機(jī)拍攝視頻以采集查詢(xún)圖像,并通過(guò)綁定 RTK 記錄儀獲取拍攝時(shí)的地理位置信息。該采集 APP 能夠同時(shí)記錄手機(jī)內(nèi)置傳感器的數(shù)據(jù),包括 IMU、重力計(jì)、指南針、藍(lán)牙、WiFi 和 GPS。拍攝視頻與所有傳感器均經(jīng)過(guò)硬件同步和細(xì)致校準(zhǔn)。由于論文關(guān)注于單圖的視覺(jué)定位,因此視頻序列會(huì)進(jìn)行采樣以生成不連續(xù)的單張圖像。
3 三維輔助地圖構(gòu)建與偽位姿真值生成
由于查詢(xún)圖像與三維參考地圖之間存在跨時(shí)節(jié)的變化,因此基于半年前構(gòu)建的三維參考地圖生成查詢(xún)圖像的偽位姿真值較為困難。論文提出在采集查詢(xún)圖像時(shí),同時(shí)構(gòu)建一個(gè)三維輔助地圖。三維輔助地圖的構(gòu)建方法與三維參考地圖類(lèi)似,同樣使用全景相機(jī)和 RTK 記錄儀進(jìn)行采集,并采用 ICP 技術(shù)進(jìn)行對(duì)齊。基于三維輔助地圖生成查詢(xún)圖像的偽真值等同于基于三維參考地圖生成的偽真值。論文設(shè)計(jì)了一套聯(lián)合優(yōu)化方法生成偽真值,優(yōu)化項(xiàng)包括:1)圖像自定位約束;2)序列圖像的相對(duì)位姿約束;3)IMU 的運(yùn)動(dòng)約束;4)其他先驗(yàn)約束,如重力方向和 RTK 位置。
審核編輯 :李倩
聲明:本文內(nèi)容及配圖由入駐作者撰寫(xiě)或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問(wèn)題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
傳感器
+關(guān)注
關(guān)注
2548文章
50664瀏覽量
751940 -
圖像檢索
+關(guān)注
關(guān)注
0文章
28瀏覽量
8030 -
視覺(jué)定位
+關(guān)注
關(guān)注
5文章
49瀏覽量
12376
原文標(biāo)題:CVPR 2023 | 六自由度視覺(jué)定位
文章出處:【微信號(hào):3D視覺(jué)工坊,微信公眾號(hào):3D視覺(jué)工坊】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
DSP在六自由度電磁跟蹤系統(tǒng)中的應(yīng)用
六自由度電磁跟蹤系統(tǒng)根據(jù)電磁感應(yīng)的原理來(lái)計(jì)算出目標(biāo)的六個(gè)自由度參數(shù),從而唯一確定目標(biāo)的位置和姿態(tài)。怎樣由接收到的模擬信號(hào)計(jì)算得到目標(biāo)的位置和姿態(tài)參數(shù)是影響整個(gè)系統(tǒng)性能的關(guān)鍵所在。在一些
發(fā)表于 01-25 00:11
?1295次閱讀
基于FPGA EtherCAT的六自由度機(jī)器人視覺(jué)伺服控制設(shè)計(jì)
和增強(qiáng)系統(tǒng)處理圖像的實(shí)時(shí)性,本文提出了一種伊瑟特的六自由度機(jī)器人視覺(jué)伺服控制系統(tǒng),將攝像頭集成到基于 Zynq的伊瑟特主站上,提高了視覺(jué)伺服的實(shí)時(shí)性.經(jīng)測(cè)試,該平臺(tái)能夠?qū)?/div>
發(fā)表于 05-29 16:17
基于STM32、以太網(wǎng)、Labview的六自由度Stewart并聯(lián)運(yùn)動(dòng)平臺(tái)模型
六自由度Stewart并聯(lián)運(yùn)動(dòng)平臺(tái)模型-X,Y,Z平移、旋轉(zhuǎn)測(cè)試六自由度Stewart并聯(lián)運(yùn)動(dòng)平臺(tái)-Z向旋轉(zhuǎn)正弦波復(fù)現(xiàn)六
發(fā)表于 04-16 23:25
關(guān)于六個(gè)自由度座椅的控制
最近在參與一個(gè)六個(gè)自由度座椅控制的課題,需要查閱哪些方面的相關(guān)書(shū)籍,有什么推薦嗎?謝謝各位
發(fā)表于 01-13 14:46
基于Matlab的開(kāi)源六自由度協(xié)作機(jī)器人實(shí)驗(yàn)平臺(tái)
一前言針對(duì)機(jī)器人相關(guān)專(zhuān)業(yè)的教學(xué)需求,商飛信息科技開(kāi)發(fā)出此開(kāi)源六自由度協(xié)作機(jī)器人實(shí)驗(yàn)平臺(tái)。該平臺(tái)有以下幾大特色機(jī)器人本體采用自主設(shè)計(jì)的3Kg負(fù)載六自由度協(xié)作機(jī)器人,機(jī)器人每個(gè)關(guān)節(jié)集成電機(jī)
發(fā)表于 09-07 07:10
超聲波在六自由度測(cè)量定位系統(tǒng)中的應(yīng)用
超聲波在六自由度測(cè)量定位系統(tǒng)中的應(yīng)用,有興趣的同學(xué)可以下載學(xué)習(xí)
發(fā)表于 05-04 14:37
?0次下載
六自由度液壓運(yùn)動(dòng)平臺(tái)的迭代學(xué)習(xí)控制盧穎
六自由度液壓運(yùn)動(dòng)平臺(tái)的迭代學(xué)習(xí)控制_盧穎
發(fā)表于 03-15 08:00
?1次下載
什么是六自由度壓電納米定位臺(tái),它的作用是什么
什么是六自由度壓電納米定位臺(tái)? 六自由度壓電納米定位臺(tái)可產(chǎn)生X、Y、Z三軸直線運(yùn)動(dòng)以及x、y、z
發(fā)表于 08-10 11:37
?1236次閱讀
ADIS16367:六自由度慣性傳感器報(bào)廢數(shù)據(jù)表
ADIS16367:六自由度慣性傳感器報(bào)廢數(shù)據(jù)表
發(fā)表于 05-10 15:50
?4次下載

ADIS16485:戰(zhàn)術(shù)級(jí)六自由度慣性傳感器數(shù)據(jù)表
ADIS16485:戰(zhàn)術(shù)級(jí)六自由度慣性傳感器數(shù)據(jù)表
發(fā)表于 05-23 17:32
?9次下載
ADIS16385:六自由度慣性傳感器報(bào)廢數(shù)據(jù)表
ADIS16385:六自由度慣性傳感器報(bào)廢數(shù)據(jù)表
發(fā)表于 05-24 09:14
?1次下載
ADIS16495:戰(zhàn)術(shù)級(jí)六自由度慣性傳感器數(shù)據(jù)表
ADIS16495:戰(zhàn)術(shù)級(jí)六自由度慣性傳感器數(shù)據(jù)表
發(fā)表于 05-25 18:04
?9次下載
ADIS16497:戰(zhàn)術(shù)級(jí)六自由度慣性傳感器數(shù)據(jù)表
ADIS16497:戰(zhàn)術(shù)級(jí)六自由度慣性傳感器數(shù)據(jù)表
發(fā)表于 05-25 20:07
?7次下載
基于FPGA的六自由度機(jī)器人視覺(jué)伺服控制方案設(shè)計(jì)
? 機(jī)器人視覺(jué)系統(tǒng)的硬件選擇直接影響圖像采集,圖像的質(zhì)量和后期的處理,并影響整個(gè)控制系統(tǒng)的實(shí)時(shí)性,所以應(yīng)根據(jù)要求和這些硬件性能,嚴(yán)格選擇硬件。基于伊瑟特的六自由度機(jī)器人視覺(jué)伺服控制系統(tǒng)
發(fā)表于 04-24 10:31
?433次閱讀

- 設(shè)計(jì)技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測(cè)量?jī)x表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無(wú)線
- 接口/總線/驅(qū)動(dòng)
- 處理器/DSP
- EDA/IC設(shè)計(jì)
- 存儲(chǔ)技術(shù)
- 光電顯示
- EMC/EMI設(shè)計(jì)
- 連接器
- 行業(yè)應(yīng)用
- LEDs
- 汽車(chē)電子
- 音視頻及家電
- 通信網(wǎng)絡(luò)
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實(shí)
- 可穿戴設(shè)備
- 機(jī)器人
- 安全設(shè)備/系統(tǒng)
- 軍用/航空電子
- 移動(dòng)通信
- 工業(yè)控制
- 便攜設(shè)備
- 觸控感測(cè)
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 特色內(nèi)容
- 專(zhuān)欄推薦
- 學(xué)院
- 設(shè)計(jì)資源
- 設(shè)計(jì)技術(shù)
- 電子百科
- 電子視頻
- 元器件知識(shí)
- 工具箱
- VIP會(huì)員
- 最新技術(shù)文章
- 社區(qū)
- 小組
- 論壇
- 問(wèn)答
- 評(píng)測(cè)試用
- 企業(yè)服務(wù)
- 產(chǎn)品
- 資料
- 文章
- 方案
- 企業(yè)
- 供應(yīng)鏈服務(wù)
- 硬件開(kāi)發(fā)
- 華秋電路
- 華秋商城
- 華秋智造
- nextPCB
- BOM配單
- 媒體服務(wù)
- 網(wǎng)站廣告
- 在線研討會(huì)
- 活動(dòng)策劃
- 新聞發(fā)布
- 新品發(fā)布
- 小測(cè)驗(yàn)
- 設(shè)計(jì)大賽
- 華秋
- 關(guān)于我們
- 投資關(guān)系
- 新聞動(dòng)態(tài)
- 加入我們
- 聯(lián)系我們
- 舉報(bào)投訴
- 社交網(wǎng)絡(luò)
- 微博
- 移動(dòng)端
- 發(fā)燒友APP
- 硬聲APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內(nèi)容合作
- 黃晶晶:huangjingjing@elecfans.com
- 內(nèi)容合作(海外)
- 張迎輝:mikezhang@elecfans.com
- 供應(yīng)鏈服務(wù) PCB/IC/PCBA
- 江良華:lanhu@huaqiu.com
- 投資合作
- 曾海銀:zenghaiyin@huaqiu.com
- 社區(qū)合作
- 劉勇:liuyong@huaqiu.com
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察



版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長(zhǎng)沙市望城經(jīng)濟(jì)技術(shù)開(kāi)發(fā)區(qū)航空路6號(hào)手機(jī)智能終端產(chǎn)業(yè)園2號(hào)廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
評(píng)論